Portal_Manual_1.2.1_Rev_H-1.pdf - 第84页
Portal PVA Revisio n H ( 2018 ) 84 of 93 16.7 Limit Erro r Re cov ery P roced ure The machine encounters a limit error w hen the g antry exc eeds the software or hardware limits. The stop codes a re s ho wn in the system…

Portal
PVA
Revision H (2018)
83 of 93
16.6 Position Error Recovery Procedure
A position error occurs when the difference between the commanded position and the
current position is more than the maximum allowable error limit for an axis.
You can get an error limit if the dispense/spray head hits a hard stop in Manual mode, if
the speed or acceleration is set too high, or if the axes drives are not powered. Make
sure the “Emergency Stop” button is not engaged. The motor stop codes are shown in
the system messages window.
NOTE: Refer to Section 16.8 for more information on stop codes.
Figure 99: Position Error
To correct the position error, do the steps that follow:
1. Engage the “Emergency Stop” button.
2. Open the access door.
3. Move the dispense head to the center of the work area. The Z-axis has a brake.
Turn the Z-axis motor coupling by hand to move the dispense head as
necessary.
4. Close the access door.
5. Disengage the “Emergency Stop” button.
6. Select “Continue” to clear the error.
7. Do the startup procedure.

Portal
PVA
Revision H (2018)
84 of 93
16.7 Limit Error Recovery Procedure
The machine encounters a limit error when the gantry exceeds the software or
hardware limits. The stop codes are shown in the system messages window.
Figure 100: Limit Error
1. Engage the “Emergency Stop” button.
2. Open the access door.
3. Move the dispense head to the center of the work area. The Z-axis has a brake.
Turn the motor coupling by hand to move the dispense head as necessary.
4. Close the access door.
5. Disengage the “Emergency Stop” button.
6. Select “Continue” to clear the error.
7. Do the startup procedure.
Portal
PVA
Revision H (2018)
85 of 93
16.8 Stop Codes
For position and limit errors, the error screen shows the stop codes for all the motors.
This shows which axis (or axes) caused the machine to fault.
Table 2: Stop Code Definitions
Code
Meaning
0
Motors are running, independent mode.
1
Motors stopped at commanded independent position.
2
Decelerating or stopped by FWD limit switch or software.
3
Decelerating or stopped by REV limit switch or software.
4
Decelerating or stopped by Stop Command (ST).
6
Stopped by Abort input.
7
Stopped by Abort command (AB).
8
Decelerating or stopped by Off-on-Error (OE1).
9
Stopped after Finding Edge (FE).
10
Stopped after Homing (HM).
50
Contour running.
51
Contour Stop.
99
MC timeout.
100
Motors are running, vector sequence.
101
Motors stopped at commanded vector.
16.9 Request the Motion Controller Version
Do the procedure below to request the motion controller firmware version. Refer to the
PathMaster® Manual.
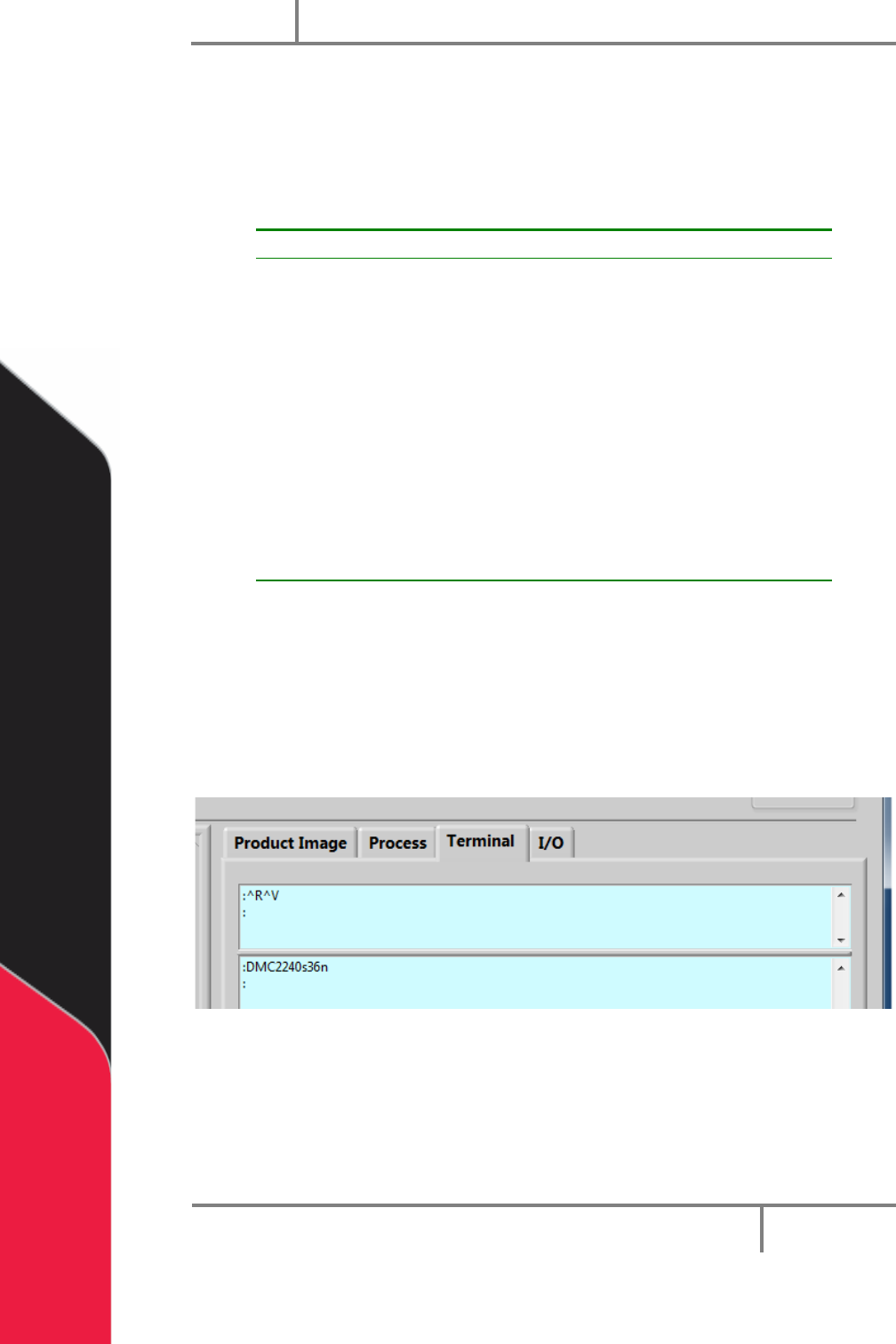
1. Select the Terminal tab on the right side of the portal window.
2. In the terminal window type ‘^R^V’.
Figure 101: Portal Terminal Window
3. Press “Enter”.
The motion controller model and firmware version are shown in the terminal window.