JX-350_QA表.pdf - 第5页
QA 表 8 电动台架装置 RAIL_GUIDE 组装精度 .............................................................................................. 8-1 台架组装精度 ....................................................................................…

QA 表
3 HEAD
周围
BMR 传感器高度调整 ................................................................................................. 3-1
HMS 传感器高度调整 ................................................................................................. 3-2
真空校准 .................................................................................................................... 3-3
确认无吸嘴真空值 ...................................................................................................... 3-4
4 OCC
装配
OCC 摄像机焦点调整 ................................................................................................. 4-1
OCC 照明光量调整(OCC 照明) ............................................................................. 4-2
OCC 摄像机补偿调整(角度) .................................................................................. 4-3
5
基板传送
顺利地传送基板 .......................................................................................................... 5-1
可动侧轨道的稳定(螺旋轴的松动) ......................................................................... 5-5
传送轨道宽度变更 ...................................................................................................... 5-6
传送基板的识别(IN・OUT 传感器关系) ................................................................... 5-7
在夹紧位置上的基板识别(STOP 传感器关系) ........................................................ 5-8
X 方向的基板定位(止动器关系) ............................................................................. 5-9
传送通道与 X 轴的平行 ............................................................................................ 5-10
贴装时的基板上面高度 ............................................................................................. 5-11
自动基板宽度调整装置皮带张力 ............................................................................... 5-12
基板夹紧动作的稳定(夹紧杆的升降) .................................................................... 5-13
基板夹紧的 ON/OFF 检出(夹紧传感器) ............................................................... 5-14
6
空气
压力调整 .................................................................................................................... 6-1
7 ATC
ATC 传感器配件调整 ................................................................................................. 7-1
速度控制器调整 .......................................................................................................... 7-2
ATC 底板上面平面度 ................................................................................................. 7-3
ATC、校准板的位置调整 ............................................................................................. 7-4

QA 表
8 电动台架装置
RAIL_GUIDE 组装精度 .............................................................................................. 8-1
台架组装精度 ............................................................................................................. 8-2
吸取位置精度 ............................................................................................................. 8-4
FDC 托架装配调整值 ................................................................................................. 8-5
9 台架周边装置
驱动气缸(机械式固定台架规格) ............................................................................. 9-1
驱动气缸(机械式专用更换台车规格) ...................................................................... 9-2
驱动气缸(机械电动式共用更换台车规格) ............................................................... 9-3
台架支架高度调整 ...................................................................................................... 9-4
台架的平行度 ............................................................................................................. 9-5
台架气缸 .................................................................................................................... 9-6
板支架(机械式台架) ............................................................................................... 9-7
送料器浮起传感器的高度(机械式送料器规格) ........................................................ 9-8
供料器浮起传感器+误插入防止传感器的高度(电动供料器规格) ............................ 9-9
10 支撑台
稳定支撑基板(调整支撑台的平面及高度) ............................................................. 10-1
识别支撑台的高度位置(BU 传感器位置) .............................................................. 10-2
基板贴片元件的稳定(支撑台的动作速度) ............................................................. 10-3
可支撑基板的背面(支撑销高度调整) .................................................................... 10-4
11 电气装置
DC 电源输出电压 ..................................................................................................... 11-1
DC 电源输出电压(ETF) ....................................................................................... 11-2
XY 轴伺服放大器的轴设置 ....................................................................................... 11-3
Z/θ 轴伺服放大器的轴设置 ....................................................................................... 11-4
传送步进马达驱动电流 (M/C Rev.D 之前可以应用) ................................................. 11-5
传送步进马达驱动设定 (适用于 M/C Rev.E) ............................................................ 11-6
自动宽度调整用步进马达驱动电流 ........................................................................... 11-7
自动宽度调整用步进马达驱动电流(EN)................................................................ 11-8
传送 IN 及 OUT 传感器的设定 .................................................................................. 11-9
供料电路板 CALVAC 传感器等级 ........................................................................... 11-10
供料电路板压力传感器等级 .................................................................................... 11-11
OCC 的设定 ........................................................................................................... 11-12
OCC 灯电路的调整 ................................................................................................ 11-13
Head 真空电平以及温度传感器输出电平 ................................................................ 11-14
BASE IO PCB ASM A/D 转换器的基准电压调整 .................................................... 11-15
调整真空泵用电磁开关的度盘 ................................................................................ 11-16
QA表
机种
确认・调整方法
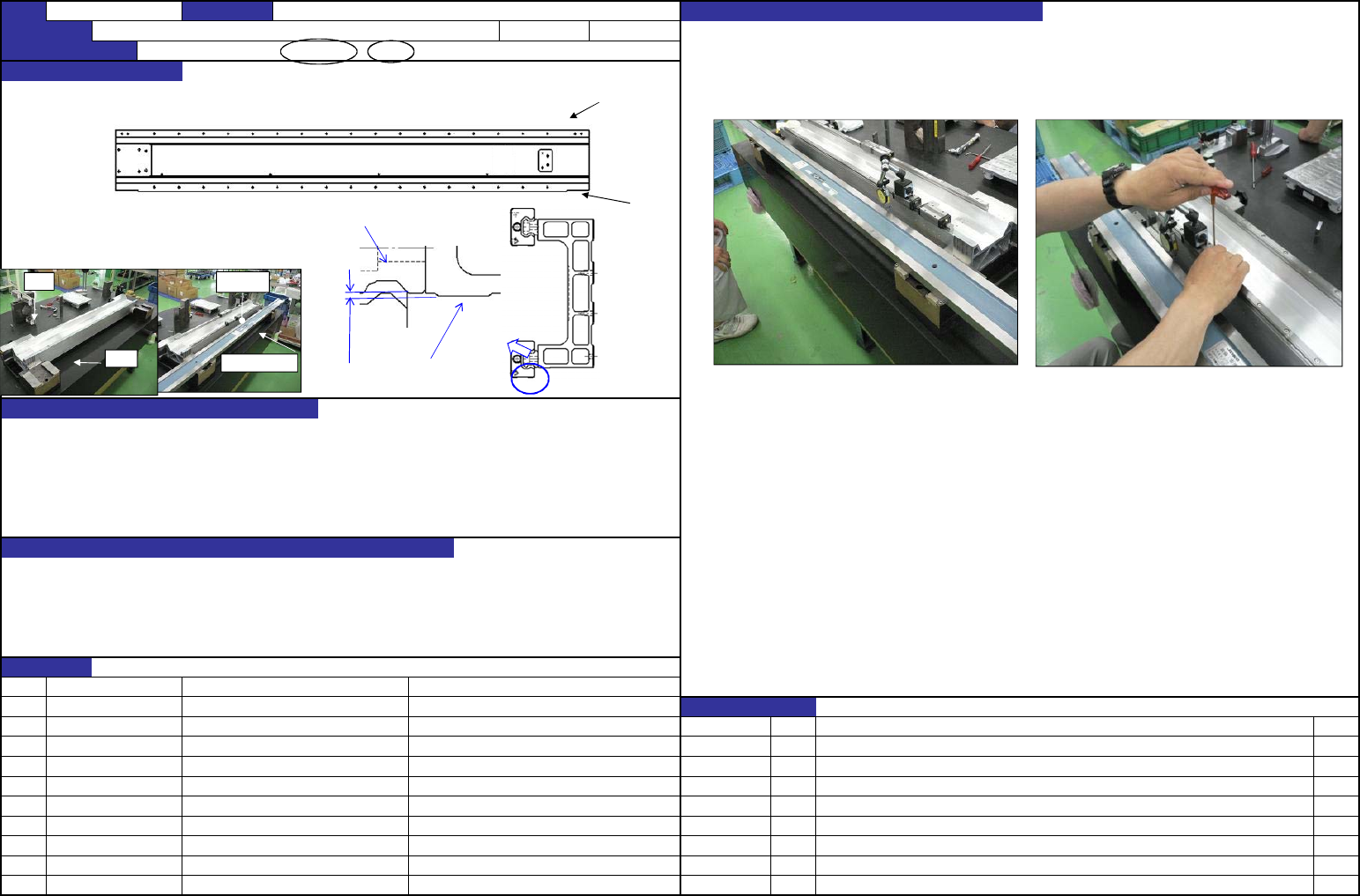
1. 将磁性尺粘贴面与LM导轨的距离调整到0.5[mm]后,把LM导轨的两端用螺丝固定。
把带有磁力表架的千分表放到LM导轨的滑块上,安装工字平尺使得LM导轨两端上千分表的值为“0”。
• 下侧LM导轨的平直度:20μm 上面 2. 确认LM导轨的全行程中平直度为20μm。
• 从磁性尺粘贴面至下侧轨道基准面(下面)的距离:0.5±0.1mm
下面
X坐标有关Y坐标位置的偏斜,影响Y方向的贴装精度。
与X轴LM导轨所受的负荷有关,严重影响到X轴LM导轨的损坏或寿命的降低。
1.贴装精度的恶化
2.X方向移动时发生异常声音
3.X轴LM导轨损坏及寿命降低
No.
①
② No. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
JX-350 装置名称
XY装置
确认方法及调整方法(故障处理方法)
功能名称
X轴LM导轨的平直度、平行(1)
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
预想故障(因规格调整值不良而发生的故障)
对象元件
货号 品名 有关质量特性
Y14Y06AU9U03 X_AXIS_FRAME_350
变更履历
40071325 X_LM_GUIDE_L
日期 内容
X轴框
平台
工字平尺
治具
滑块
磁性尺粘贴面
0.5±0.1
LM导轨
【1】-1