TR7500_Series_Software_ch-v6-3-0.pdf - 第428页
Test Research Inc. 416 TR7500SeriesUserGuide – Software 參數設定。用滑鼠點選你所要設定的圓,按 [Setting] 按鈕來設定 [Pass Level ]。 z Edge Threshold – 同 Library RIM BODY 的 Edge Threshold 。 z Test Method – 同 Library RIM Window 的 Method 。 z…
Test Research Inc.
TR7500SeriesUserGuide–Software 415
Band – 檢測的範圍,指向內或向外測的 pixel(灰色圓的部分)。
Threshold – 門檻值。
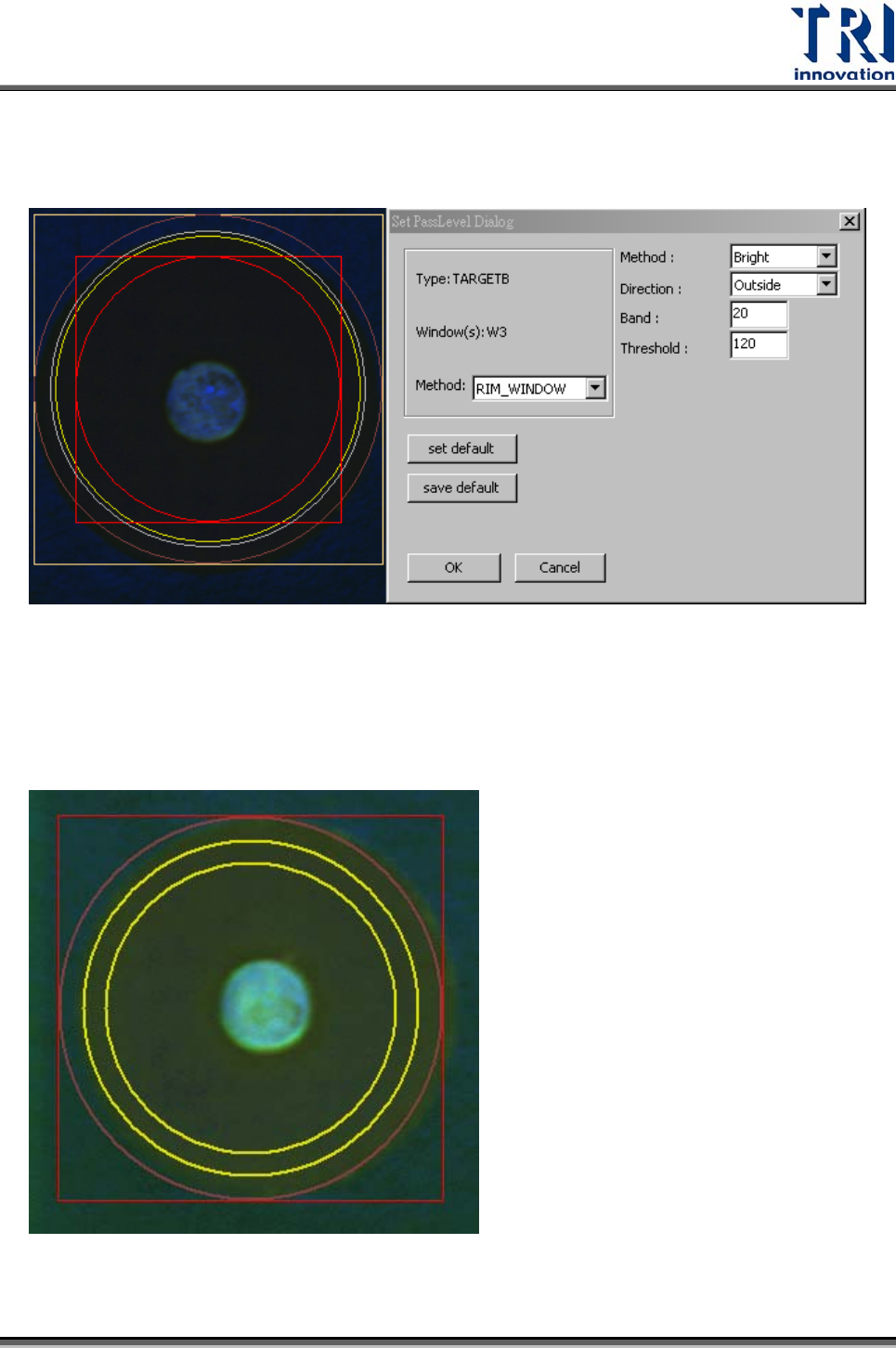
2) 主程式的設定和操作
由 Library Merge 到主程式後,系統只剩外圓的檢測框,和二個內圓,如下圖所
示。
但因 FOV 配置後也可能被切成多個區塊,每個框的最外圓仍為定位的圓
(RIM_Body),內圓為檢測圓(RIM_Window)。
Test Research Inc.
416 TR7500SeriesUserGuide–Software
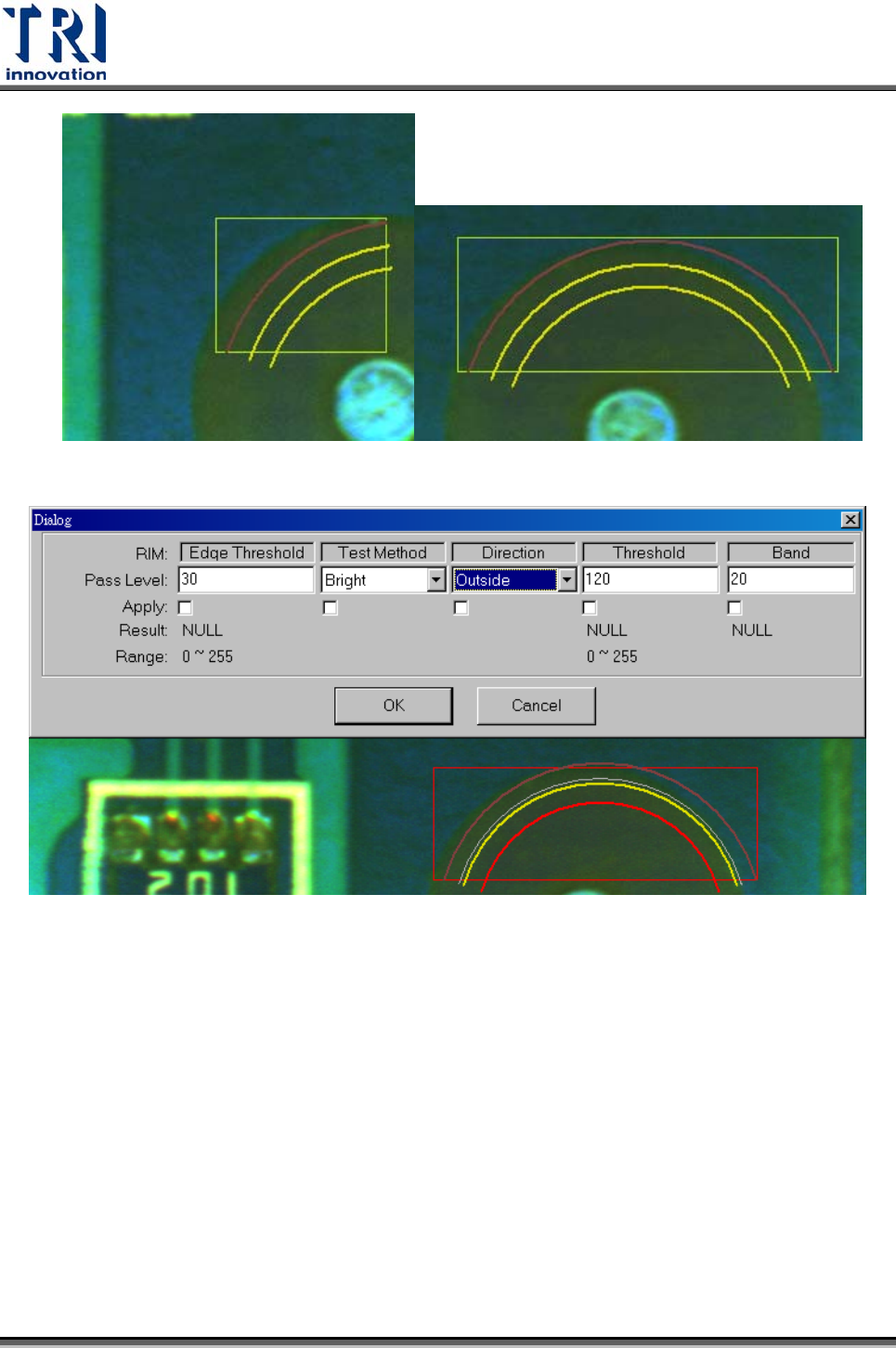
參數設定。用滑鼠點選你所要設定的圓,按[Setting]按鈕來設定[Pass Level]。
z Edge Threshold – 同 Library RIM BODY 的 Edge Threshold。
z Test Method – 同 Library RIM Window 的 Method 。
z Direction – 同 Library RIM Window的 Direction。
z Band – 同 Library RIM Window 的 Band。
z Threshold – 同 Library RIM Window 的 Threshold。
4.10.3 CCM色差比對法及RGB WEIGHTING 權重設定
4.10.3.1 色差比對法 (Color Check Method)
上方攝影機(Top-View)是採用 3 個 CCD感光感應器(Sensor)之攝影機,因此在針對各
檢測框之影像,配合 RGB三原色的擷取及權重設定,能呈現出一般黑白攝影機所無
Test Research Inc.
TR7500SeriesUserGuide–Software 417
法呈現之色差大的影像。針對上方攝影機所做的各式檢測框,能有較佳的影像對比之
品質,造成黑白對比反差較大而易於檢測出元件缺陷,在此稱為「CCM 色差比對法
(Color Check Method)」。
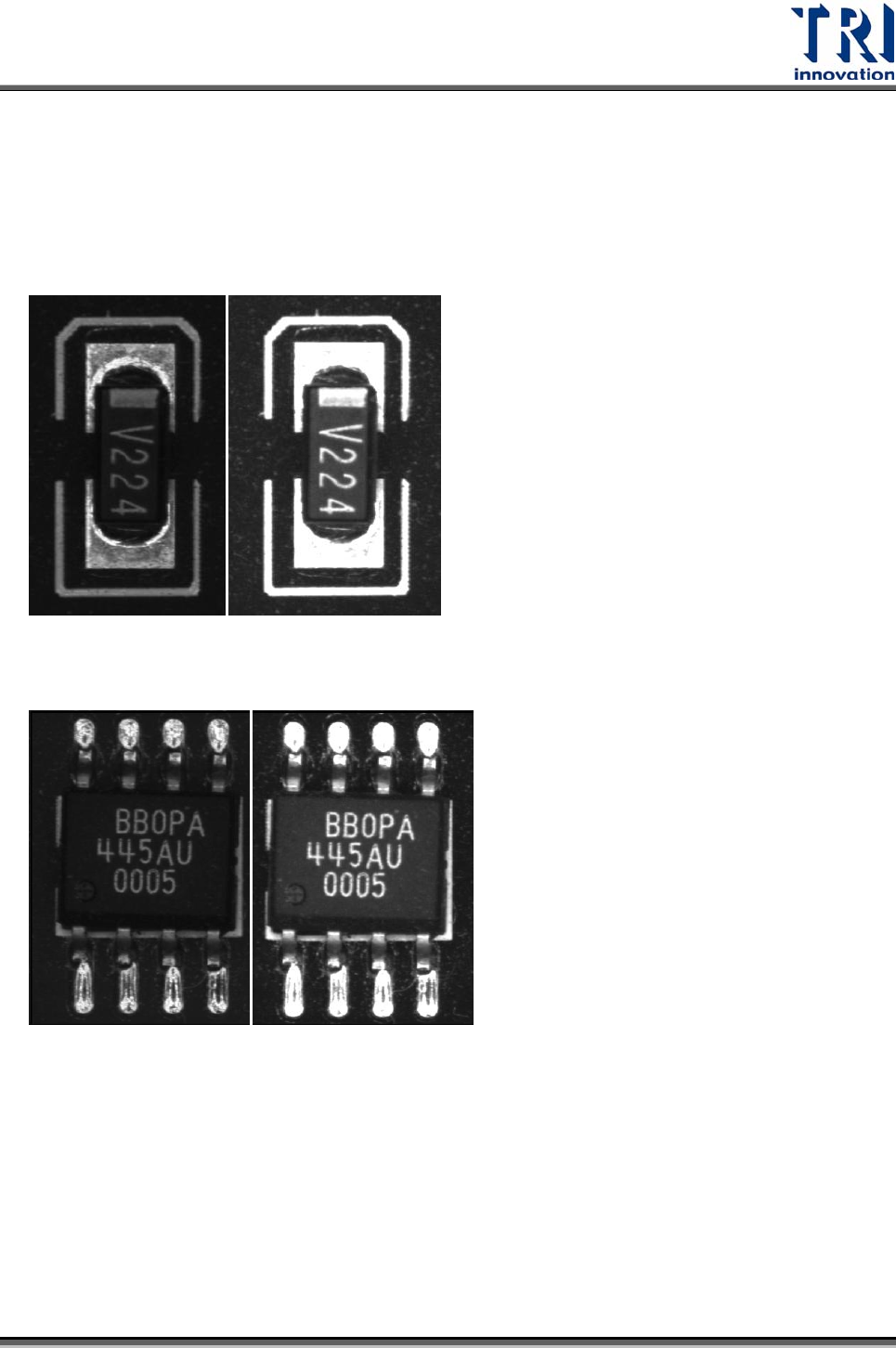
Chip 類為例,左圖為黑白攝影機之影像,右圖為彩色攝影機經過 RGB Weighting
所取得之影像。
SOP 類為例,左圖為黑白攝影機之影像,右圖為彩色攝影機經過 RGB Weighting
所取得之影像。
上述兩個說明,經由黑白攝影機之影像所擷取的灰階影像,在焊鍚點上會因表面外
形及打光角度,其所反應出的影像大多為黑白不均勻的焊鍚影像,這種影像對比的
品質,對於使用檢測框套入焊鍚點上會產生許多不可預期的誤判發生;經由彩色攝
影機經過 RGB Weighting轉換所取得之灰階影像,其所反應出的影像為亮暗分明、
對比強烈,對於使用檢測框套入做檢測較能有穩定而收斂的效果。