fh-smd_sdnb-cn5-038b.pdf - 第11页
11 无需复杂设定,自动校准 3D 视觉传感器和机器人。 只需设定 2 个项目 一键即可自动执行 提供适用于连接机器人的示例场景、机器人连接程序。 购买产品后,只需注册会员,即可免费下载用于创建示例程序的数据集输出工具。 详情请见 3D 机器人视觉应用软件随附的会员注册表。 3D 视觉传感器示例场景 • 适合拣选应用 • 适合手眼校准 输入 3D 视觉传感器的偏移 设定相机和校准目标的差距 执行自动校准 将结果输出为数值 机器人的示例程…
10
只需读取部件的
CAD
数据,就能自动创建
3D
搜索模型。
此外,部件的
CAD
数据、拾取点的设定数据以及各类机械臂的数据,均可实现全场景通用的批量管理。
如需添加品种,可直接复制场景数据,利用批量管理的
CAD
数据,创建新增品种的搜索模型。
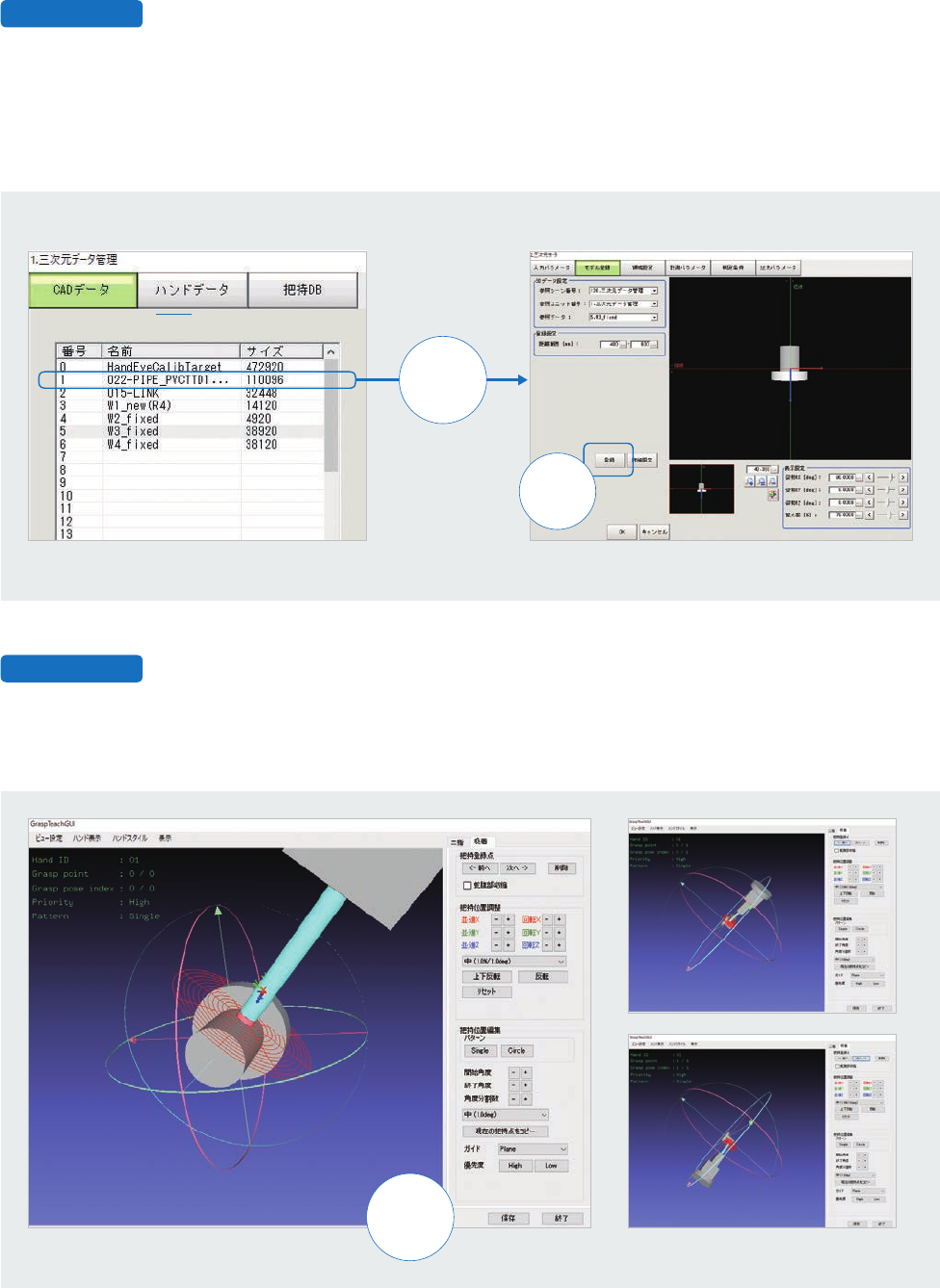
无需实际操作机器人,即可通过部件的
CAD
数据,设定拾取位置。
在
3D
图像上设定拾取位置 可设定多个拾取点
批量管理
CAD
数据、机械臂数据、拾取数据
数据管理画面
根据
CAD
数据一键创建
3D
搜索模型
登录模型创建画面
模型登录
拾取位置登录
拍摄和识别
工件拾取
只需
进行选择
一键
即可完成
创建
一键
即可显示
11
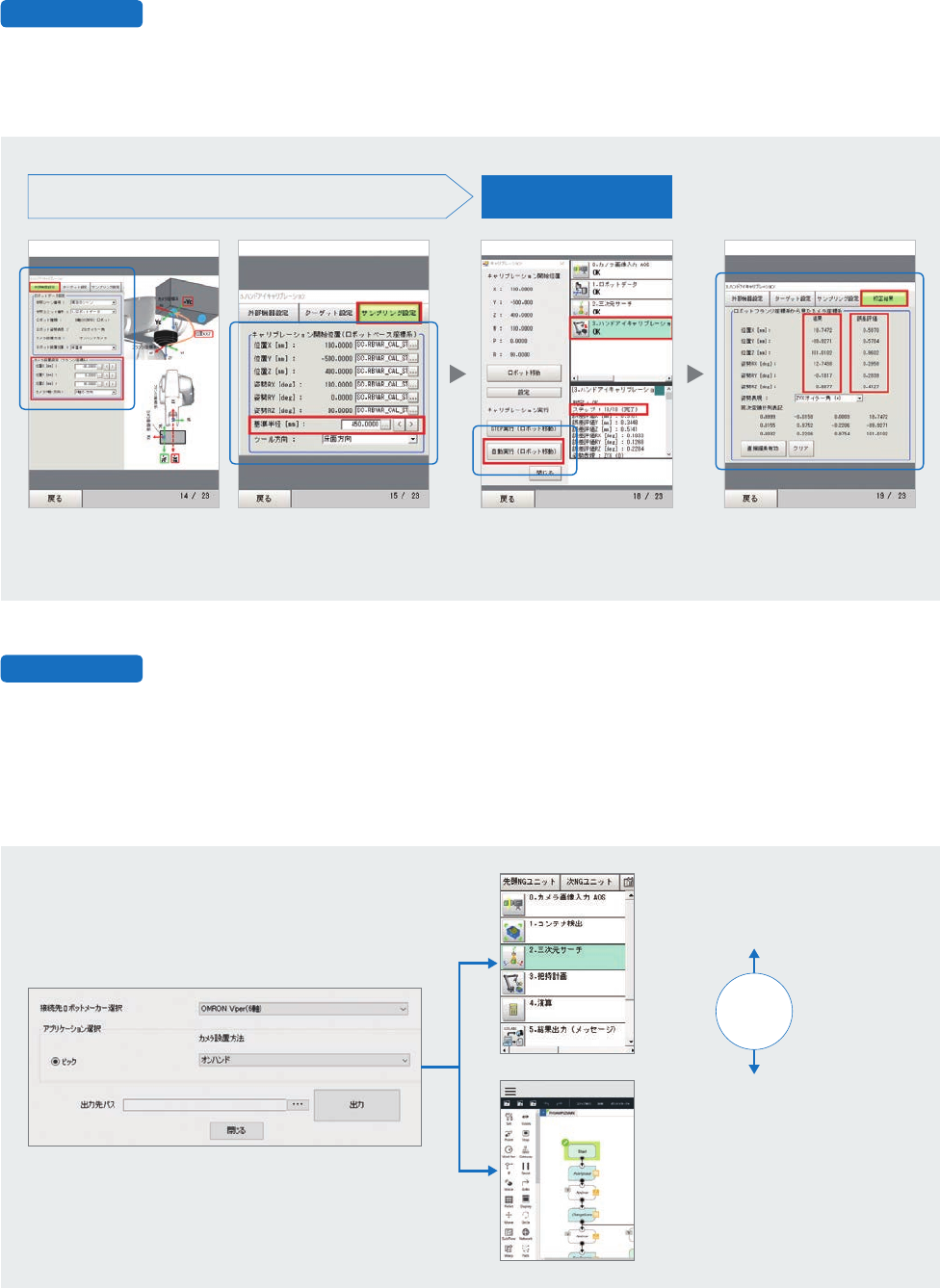
无需复杂设定,自动校准
3D
视觉传感器和机器人。
只需设定
2
个项目 一键即可自动执行
提供适用于连接机器人的示例场景、机器人连接程序。
购买产品后,只需注册会员,即可免费下载用于创建示例程序的数据集输出工具。
详情请见
3D
机器人视觉应用软件随附的会员注册表。
3D
视觉传感器示例场景
•
适合拣选应用
•
适合手眼校准
输入
3D
视觉传感器的偏移 设定相机和校准目标的差距 执行自动校准 将结果输出为数值
机器人的示例程序
•
示例程序
•
安装程序
只需选择连接机器人,即可自动创建
3D
视觉传感器的场景和连接机器人的
示例程序。
自动校准
数据集输出工具
与机器人的联动
与机器人的联动
连接操作
简单
数据集输出工具
详情请咨询当地事务所
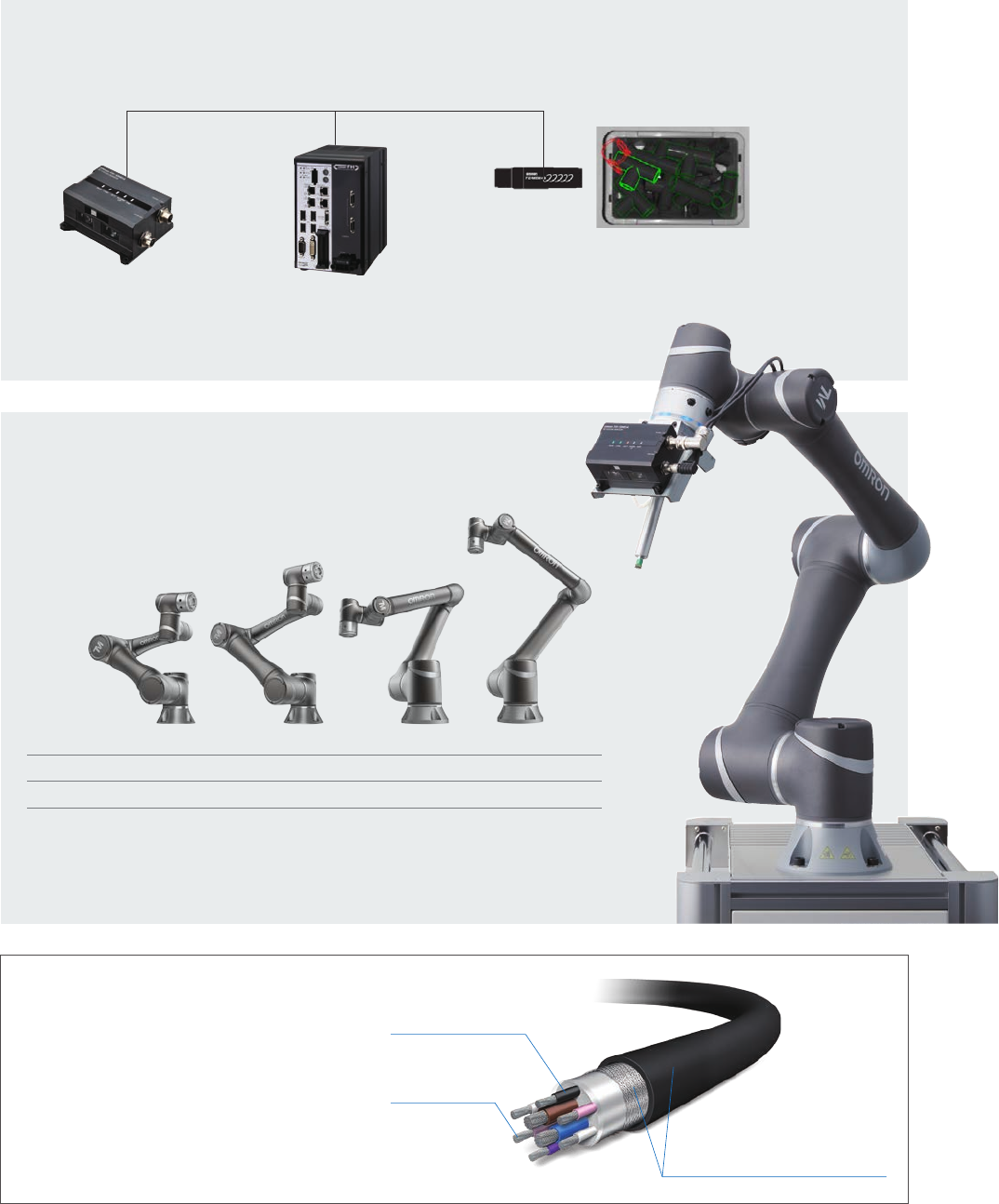
12
系统构成
提供自动拣选所需的
3D
机器人视觉系统和机器人
3D
机器人视觉系统
机器人
识别部件的位置和姿势,将部件的位置信息输出至机器人。
可搭配欧姆龙的机器人一起使用。
协作机器人
TM
系列
TM5X-700
700mm
6kg
臂长
最大可搬运重量
TM5X-900
900mm
4kg
TM14X
1100mm
14kg
TM12X
1300mm
12kg
3D
机器人视觉应用软件
只需添加至传感器控制器即可使用。
•3D
识别
•
机器人通信功能
•
校准功能
机械臂搭载型
3D
视觉传感器
FH-SMD
系列
传感器控制器
FH
系列
FH-5050
耐弯曲电缆
长期稳定运行
提供耐性约为传统耐弯曲电缆
10
倍
*
1
的电
缆产品。 用于需要更换电缆的机械臂, 可大
幅削减更换次数。
*
1.
相较于智能相机
FHV7
的耐弯曲电缆
绝缘体采用特殊材料,
减少导体间的摩擦
编织屏蔽层采用特殊结构,
保护覆膜应用柔软的特殊材质,
提高了耐磨损性
采用耐弯曲性更强的
特殊导体