fh-smd_sdnb-cn5-038b.pdf - 第6页
6 以近乎于人的速度和灵活性,加快拣选节拍 凭借高水准的 3D 图像传感技术,实现了高速准确的部件识别。 0.4 秒 * 1 高速检测 确保机器人自动拣选更流畅 借助可生成 3D 形状图像的 3D 测量技术以及识别对象姿态的 3D 识别技术, 实现部件高速检测。 传统的 相 位差方 式 约 3.0 秒 * 2 让测量和识别由传统方式转变为高速方式 欧姆龙的新方式 约 0.4 秒 1.0 0.2 2.0 0.2 测量时间 识别时间
机械臂
可动范围
货架上的工件
托盘中的工件
容器中的
工件
5
轻松移动
可搭载于协作机器人的
小型轻量化光学技术
传统的相位差
3D
相机必须配备变换照明图案的投
影结构,导致体积过大。 欧姆龙的
3D
测量技术则
借助勾勒精细图案纹样的光掩膜,缩短光路, 成
功实现了小型化。
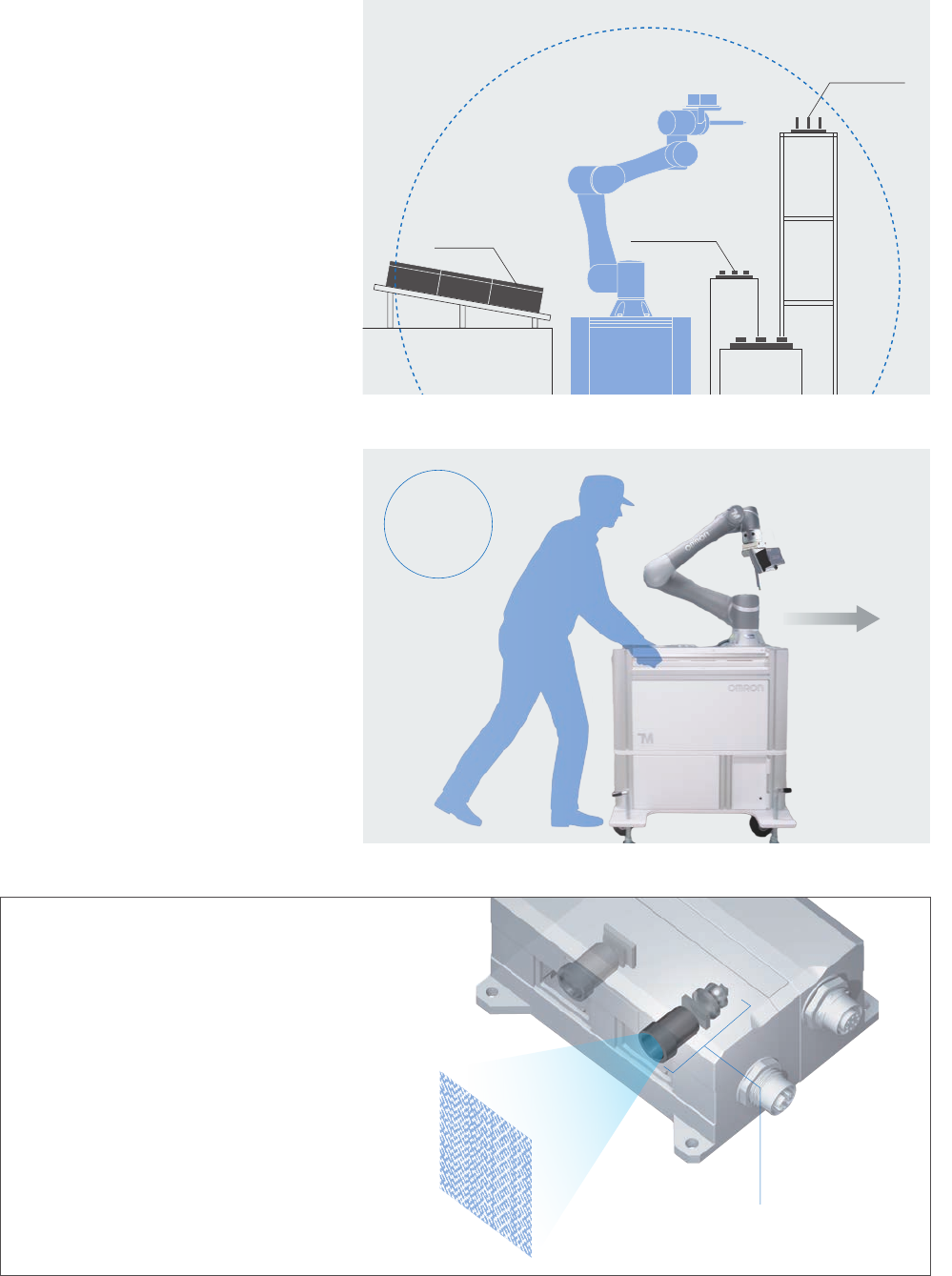
灵活拣选
轻松移动
搭配机器人使用,可以拣选分散在托盘和货架
上的部件,像人一样灵活。
借助搭载
3D
视觉传感器的机械臂、协作机器
人和移动工作站,这款拣选系统可根据作业地
点,灵活地进行移动及布局调整。
凭借光学系统结构,将光源部的
长度压缩到短短的
40mm
。
照射一种可识别的
3D
照明图案

6
以近乎于人的速度和灵活性,加快拣选节拍
凭借高水准的
3D
图像传感技术,实现了高速准确的部件识别。
0.4
秒
*
1
高速检测
确保机器人自动拣选更流畅
借助可生成
3D
形状图像的
3D
测量技术以及识别对象姿态的
3D
识别技术,
实现部件高速检测。
传统的
相位差方式
约
3.0
秒
*
2
让测量和识别由传统方式转变为高速方式
欧姆龙的新方式
约
0.4
秒
1.0
0.2
2.0
0.2
测量时间 识别时间
*
4
已获得专利
7
相位差方式
拍摄次数:
无法检测视觉死角的部件 可切换视角,消除视觉死角完成部件检测
必须变换各种照明图案,
拍摄并测量多张图像。
正上方视角:
圆柱部的检测部分
过少
无法检测
正上方视角:
圆柱部的检测部分
过少
无法检测
正上方→斜上方
(移动):
可以检测
利用二维特征缩小模型范
围,再进行三维匹配。
搜索和比对 搜索 比对
仅需拍摄
1
次的“
3D
测量技术”
高速
2D
搜索技术的升级版——“
3D
识别技术”
欧姆龙的新方式
仅需对少量模型进行搜索
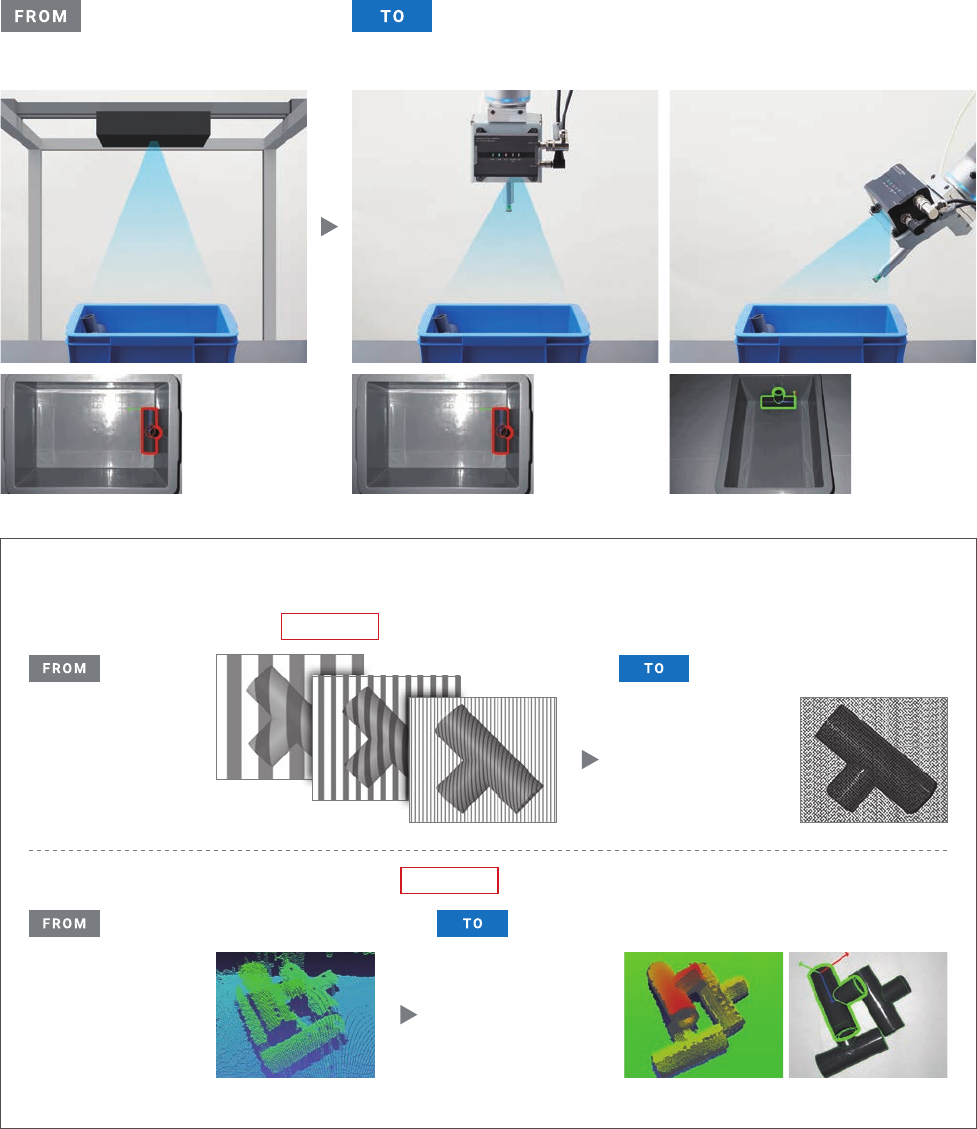
杜绝死角、稳定检测
根据部件在箱体内部的位置,可能存在固定安装相机无法检测到的死角。因此,需要通过摇晃箱体等措施,令部件进入视
野,造成设备尺寸变大、成本升高。采用机械臂配套相机,可在检测时切换视角,因此无需引入大型设备,即可稳定检测部
件。
固定安装相机 机械臂配套相机
数十次
*
1.
本公司指定条件下,
3D
测量和
3D
识别的合计时间。具体时间因对象而异。*
2.
在本公司指定条件下测得的参考时间。
*
3.
日本发明专利,专利号:
JP2018023606
*
4.
中国发明专利,专利号:
ZL201680042130.9
0.4
秒高速检测
欧姆龙的结构化照明
拍摄次数:
仅利用照明图案中
1
张具
有构图唯一性的图像,进
行拍摄和测量。
1
次
传统
3D
识别方式
对大量模型进行搜索
需要借助三维模型,进
行全范围地毯式匹配。
*
3
已获得专利