fh-smd_sdnb-cn5-038b.pdf - 第9页
9 无需手册,即可根据向导提示,完成启动拣选应用所需的大约 80 项设定。 向导设定功能 结合设定画面示意图, 掌握设定流程和必填项目 点击右下方的按钮 即可在其他画面中打开操作窗口 只需在确认设定流程的同时, 输入设定项目 只需根据用途,从 3 类向导中 选择其一 选择“拣选设定”时 借助 3 类设定向导, 即可完成所有设定。 操作窗口 (显示在其他画面中) 设定流程 / 设定向导 选择 观察 操作
8
无需熟练工,无需安装手册,轻松安装维护
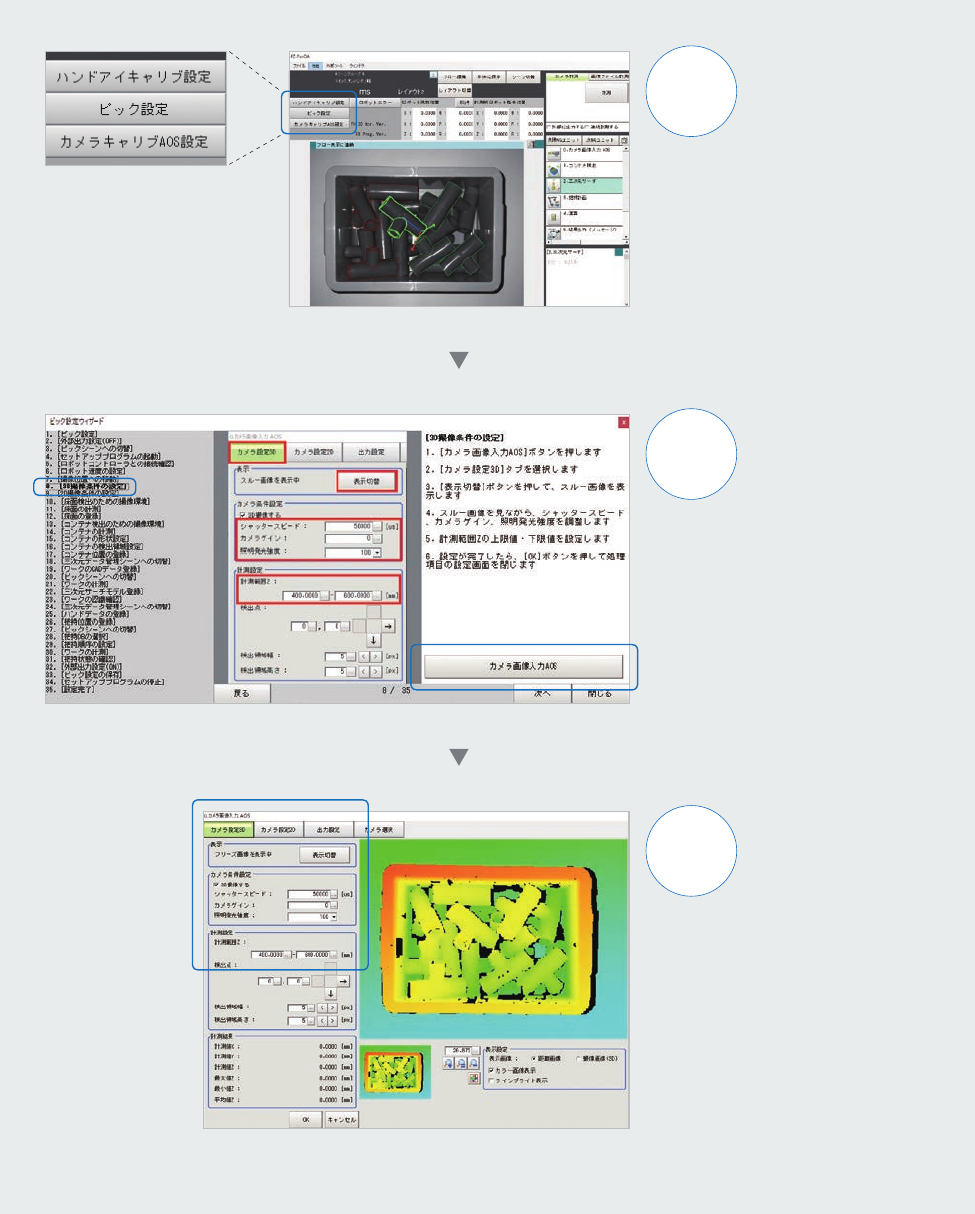
对于从相机设定到校准设定的一系列流程,只需利用向导菜单启动拣选应用,根据提示操作,即可完成应用设定。
无需操作机器人
拾取位置登录
无需操作机器人
自动校准
提供适用于机器人
的示例程序
数据集输出工具
只需读取
CAD
数据
模型登录
很难创建可以从
各角度观察部件的
3D
识别模型
必须控制机器人移动
进行拾取位置的
登录和验证
相机和机器人的
校准设定很繁杂
不知能否完成
与机器人之间的
连接设定
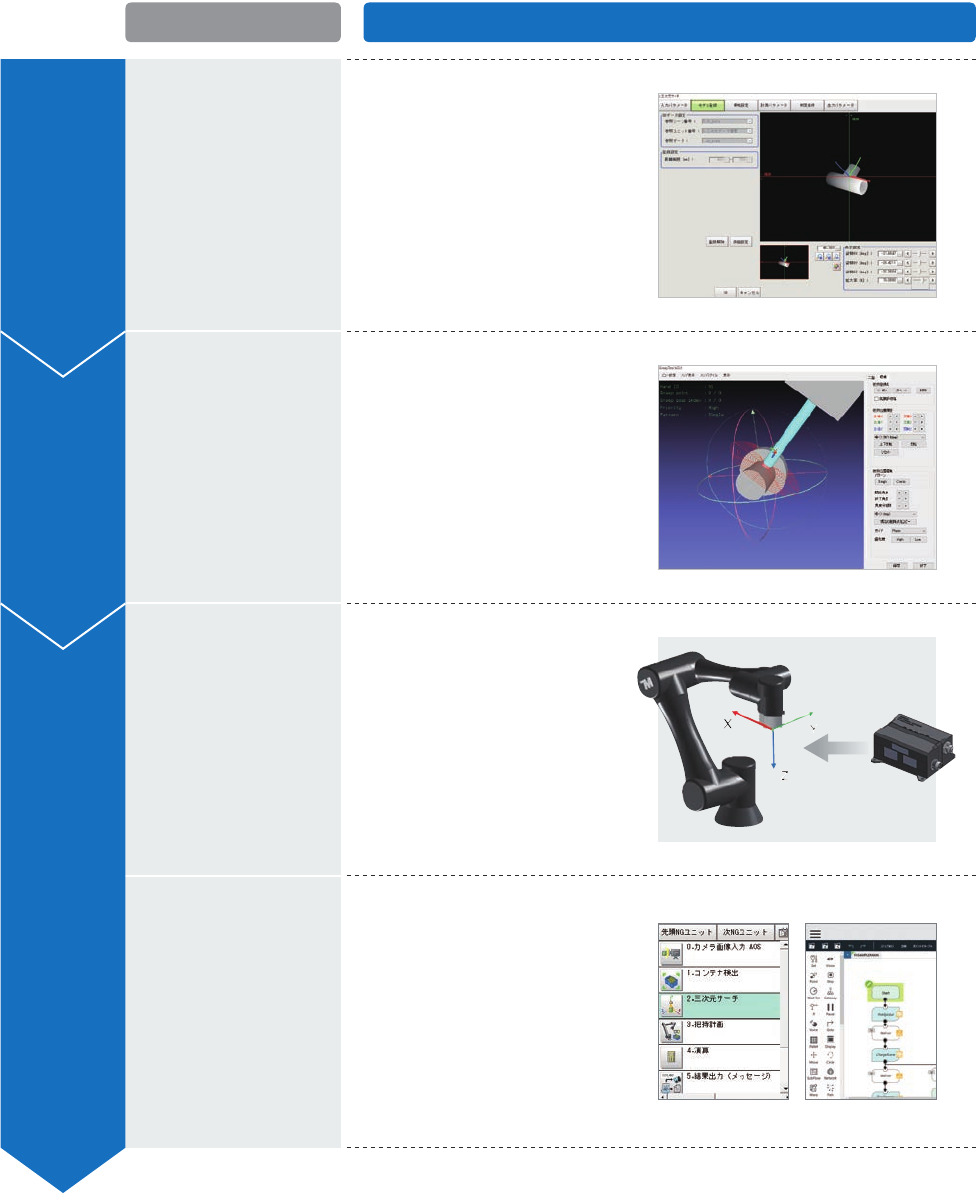
课题 向导配备的支持功能
设定的流程
拍摄和识别
工件拾取
与机器人的
联动
9
无需手册,即可根据向导提示,完成启动拣选应用所需的大约
80
项设定。
向导设定功能
结合设定画面示意图,
掌握设定流程和必填项目
点击右下方的按钮
即可在其他画面中打开操作窗口
只需在确认设定流程的同时,
输入设定项目
只需根据用途,从
3
类向导中
选择其一
选择“拣选设定”时
借助
3
类设定向导,
即可完成所有设定。
操作窗口
(显示在其他画面中)
设定流程
/
设定向导
选择
观察
操作
10
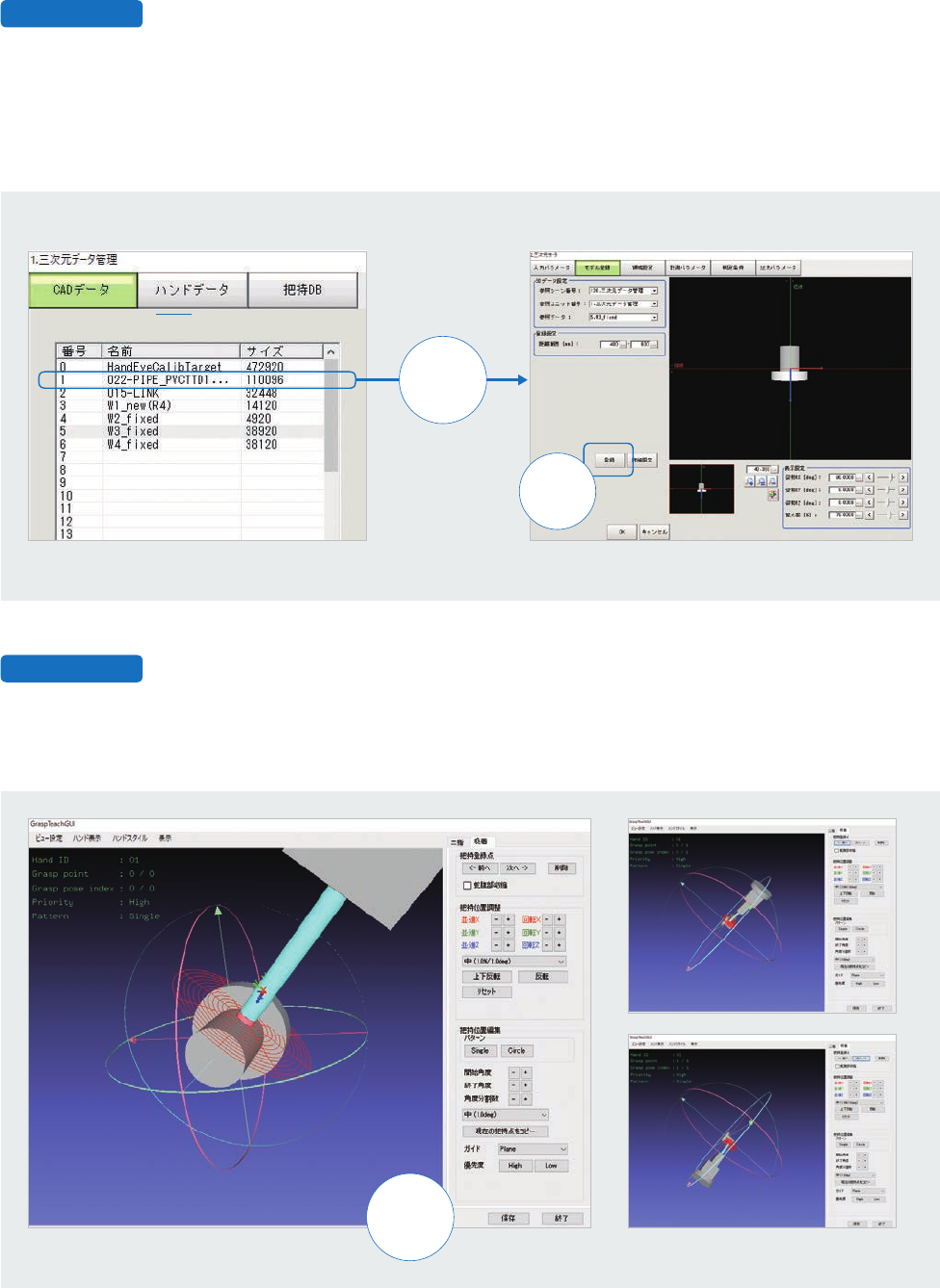
只需读取部件的
CAD
数据,就能自动创建
3D
搜索模型。
此外,部件的
CAD
数据、拾取点的设定数据以及各类机械臂的数据,均可实现全场景通用的批量管理。
如需添加品种,可直接复制场景数据,利用批量管理的
CAD
数据,创建新增品种的搜索模型。
无需实际操作机器人,即可通过部件的
CAD
数据,设定拾取位置。
在
3D
图像上设定拾取位置 可设定多个拾取点
批量管理
CAD
数据、机械臂数据、拾取数据
数据管理画面
根据
CAD
数据一键创建
3D
搜索模型
登录模型创建画面
模型登录
拾取位置登录
拍摄和识别
工件拾取
只需
进行选择
一键
即可完成
创建
一键
即可显示