00197677-04_UM_E-by-SIPLACE_FR.pdf - 第134页
3 Caractéristiques techniques e t composants Manuel d'utilisation E by SIPLACE 3.5 Tête de report À partir de la version logiciel SC 712.1 Éditi on 05/2019 134 3.5.4.1 Consignes de sécurité 3 3 AVERTISSEMENT Veuil…
Manuel d'utilisation E by SIPLACE 3 Caractéristiques techniques et composants
À partir de la version logiciel SC 712.1 Édition 05/2019 3.5 Tête de report
133
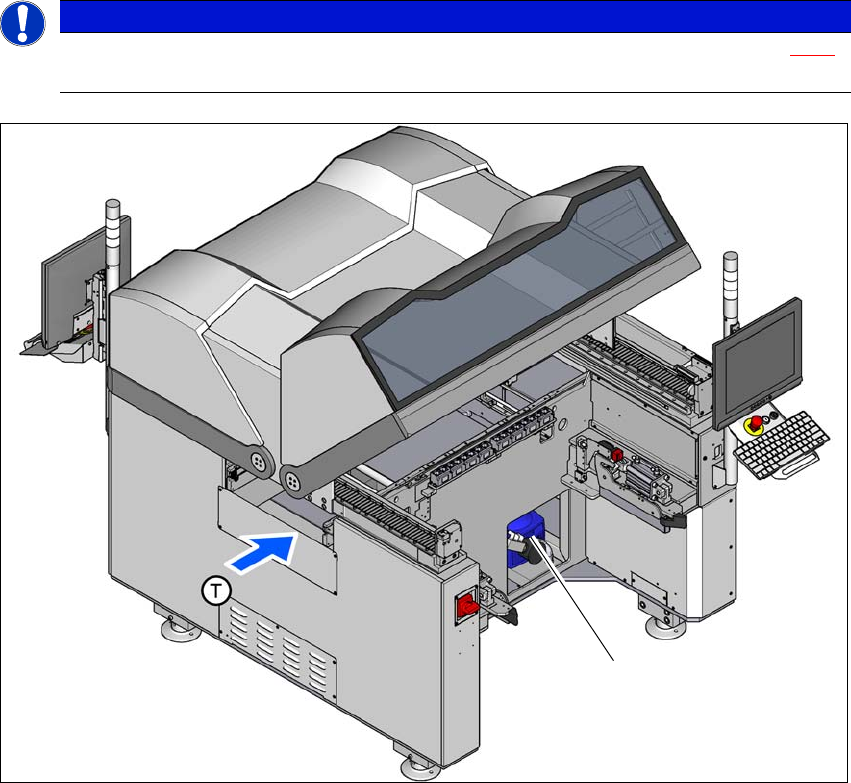
3.5.4 Pompe à vide
Chaque tête Collect&Place (SIPLACE CP14/12/6) dispose d'un générateur de vide propre qui ali-
mente les circuits de blocage et de report avec le vide nécessaire. Le générateur de vide pour les
têtes de report fonctionne suivant le principe de Venturi. Lors d'un fonctionnement avec une
pompe à vide, la consommation en air comprimé de la tête Collect&Place (SIPLACE CP14/12/6)
se réduit nettement. Les coûts de fonctionnement courants baissent suivant le montant des coûts
de l'énergie.
3
3
Fig. 3.5 - 7 Situation de la pompe à vide
(1) Situation de la pompe à vide
NOTA
La consommation d'air comprimé avec pompe à vide est indiquée dans la section 3.2.4
,
en page 109.
(1)
3 Caractéristiques techniques et composants Manuel d'utilisation E by SIPLACE
3.5 Tête de report À partir de la version logiciel SC 712.1 Édition 05/2019
134
3.5.4.1 Consignes de sécurité
3
3
AVERTISSEMENT
Veuillez SVP respecter les consignes de sécurité 2.2.6, page 61.
AVERTISSEMENT
Observez les consignes de sécurité concernant la pompe à vide figurant dans la no-
tice d'utilisation fournie.
Manuel d'utilisation E by SIPLACE 3 Caractéristiques techniques et composants
À partir de la version logiciel SC 712.1 Édition 05/2019 3.5 Tête de report
135
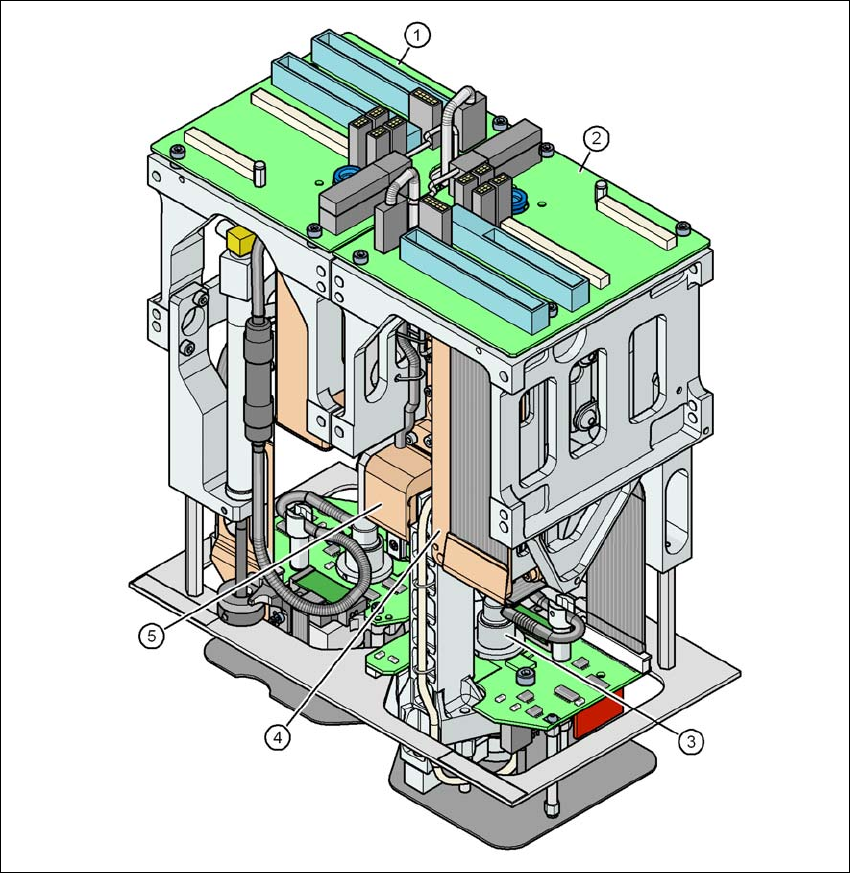
3.5.5 SIPLACE TH pour report IC haute précision
N° de référence 03033629-xx SIPLACE TH
N° de référence 03112312-xx, caméra à composants stationnaire, type 36 GigE
3
Fig. 3.5 - 8 SIPLACE TH pour report CI haute précision
(1) Le module Pick&Place 1 (PP1) - la SIPLACE TH dispose de 2 modules Pick&Place
(2) Module Pick&Place 2 (PP2)
(3) Axe DP
(4) Commande de l'axe Z
(5) Système de mesure incrémentiel de la trajectoire pour l'axe Z