5. SM411F_Operation_Training(Kor_Ver4).pdf - 第36页
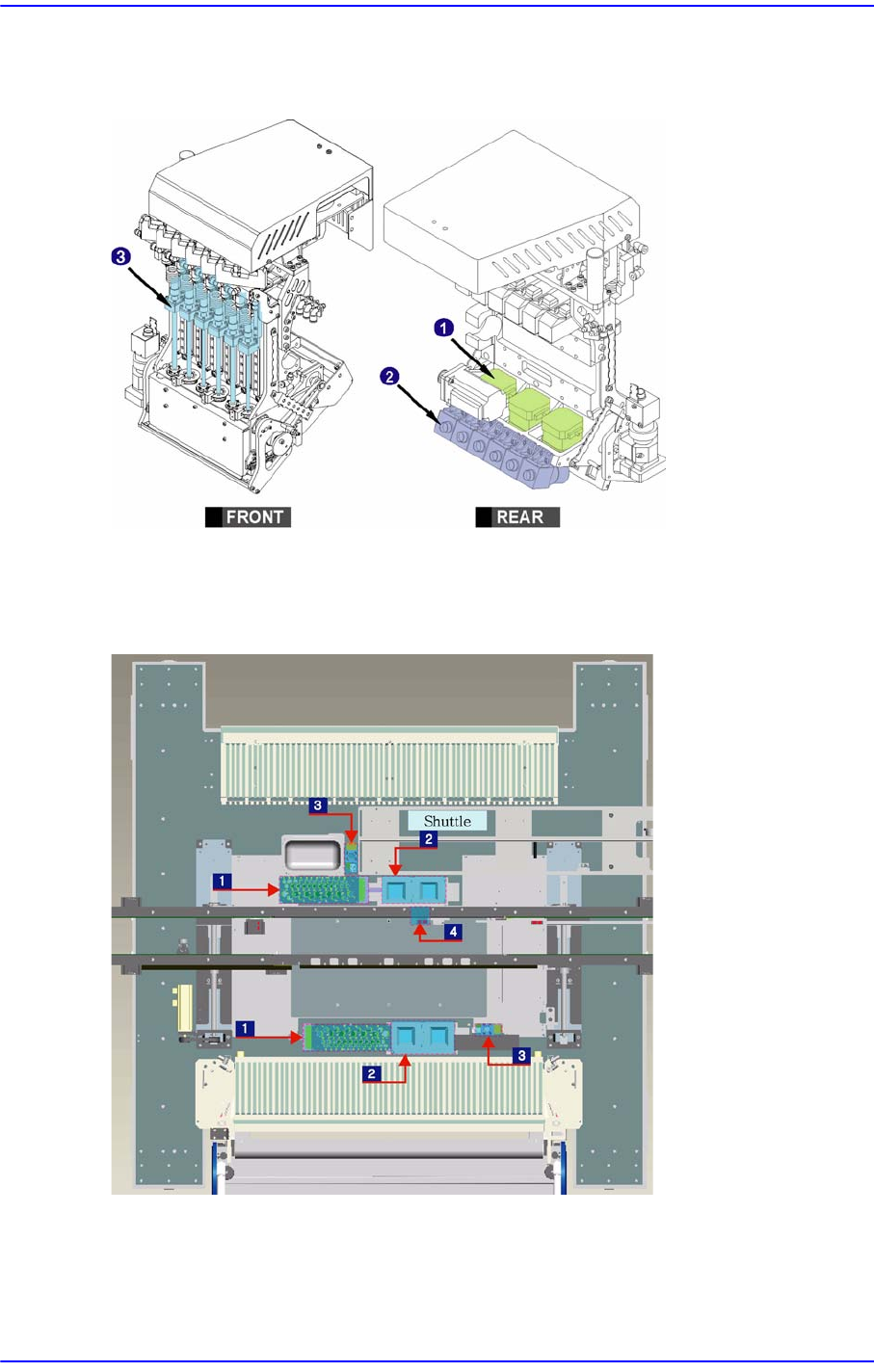
1-2 Samsung Componen t Placer SM411/411N Operation Training 1.1.1. 하드웨어적인 특징 그림 1.1 Head Assembly 1: R 축 Motor 2: Flying V ision 3 : Spindle 1: ANC 2: Fix Camera 3: Air Shower 4: PCB S topper

1-1
장비
개요
제1장. 장비 개 요
1.1. 장비의 특징
SM411F는 Shuttle Tray Feeder 를 사용함으로써 Feeder Base의 활용성을 극대화하고
Dual Gantry에 의해 장착 작업을 수행함으로써 기존의 SM421 보다 라인생산성이 향
상된 장비로 다음과 같은 장점을 가집니다.
높은 생산성 (High Performance)
Dual Gantry에 의한 SM421보다 빠른 속도의 장착 Cycle Time
Shuttle T
ray Feeder를 사용함으로서 Feeder Base 100% 활용
PCB S
topper의 위치변경에 따른 PCB Loading Time 감소
부품 및 PCB 기판 대응력 향상 (High Flexibilit
y)
04
02 Chip 부터 □42mm 부품까지 일괄 인식 가능
전면
과 후면에 대형 ANC를 설치하여 다양한 노즐 활용
POP 장착
기능 및 Auto Flux 공급 Module 제공
소
형에서 대형PCB 기판 작업 가능(L50 x W40 mm ~ L610 x W350 mm)
부품 인식 기능 강화
전면
과 후면에 각각 Fix Camera를 설치하여 인식속도 향상
Chip-C
부품에 대한 측면 흡착 체크 기능 강화
편리한 사용자 인
터페이스
전면
과 후면에 Feeder Error 표시등 설치
안
전사고 방지를 위한 Emergency Switch 추가 (Option)
T
ouch Screen 기능 지원 모니터 (Option)
노즐 끝 이물
질 청소를 위한 Air Shower 장치
향상
된 기능의 EasyOLP Ver 6.0 지원
IT System V
er 3.1 지원
1-2
Samsung Component Placer SM411/411N Operation Training
1.1.1. 하드웨어적인 특징
그림
1.1 Head Assembly
1: R
축
Motor
2: Flying Vision
3
: Spindle
1: ANC
2: Fix Camera
3: Air Shower
4: PCB Stopper

1-3
장비
개요
Fix Camera를 통한 부품 인식을 위해 미러의 캠 구조를 변경하였습니다 .
Fly Camera를 통한 크기가 큰 부품의 인식을 위해 Outer 조명의 구조를 변경하였
습니다.
전면과 후면에 각각 Fix Camera를 설치하여 큰 부품의 인식하는데 소요되는 시
간을 단축시켰습니다 .
PCB의 크기에 따라 PCB Stopper의 위치를 자유롭게 변경할 수 있도록 하여 PCB
의 Loading Time을 감소시켰습니다.
전면과 후면에 각각 Air S
hower를 설치하여 노즐 끝의 이물질 청소를 수행하고
미소칩을 덤프박스에 버릴 때 오류가 발생되는 것을 예방합니다.
자동으로 Flux를 공급하는 장치를 피더베이스 슬롯에 설치하여 사용할 수 있도
록 하였습니다.
전면과 후면에 각각 대형 ANC를 설치하여 다양한 노즐을 사용할 수 있도록 하
였습니다.
다양한 부품을 인식하기 위해서 Fly Camera로 FOV 16mm Camera와 FOV 16mm
Mega Pixel Camera를 적용하고 있습니다. (FOV 16mm Mega Pixel Camera는 선
택 사양
입니다.)
1.1.2. 소프트웨어적인 특징
장착 시퀀스를 개선하여 Array PCB에 대한 장착속도를 향상시켰습니다.
장착 알고리즘을 개선하여 POP 장착을 가능하도록 하였습니다.
작업 준비를 위한 장착 테스트 또는 작업 중 일부 장착점의 보완 작업을 용이하
게 할 수 있도록 Step 대화상자에서 선택된 장착점에 대해 장착을 하는 기능을
제공합니다.
헤드의 Vacuum 을 이용하여 공급장치의 흡착점 및 Auto Flux Module의 Dipping
Point에 대한 Z축 높이를 자동
으로 측정할 수 있도록 하였습니다.
장착 Cycle Time을 개선하기 위해서 Pre-ANC 및 Pre-Feeder_Shutter-Open 기능을
제공합니다.
비전 소프트웨어를 개선하여 부품의 인식속도, 대응력 및 신뢰성을 향상시켰습
니다.
Chip-C 부품의 측면 흡착 체크 기능을 추가하여 부품의 인식능력을 향상시
켰습니다.
비전 인식 알
고리즘을 개선하여 Chip 부품의 측면 흡착 가능성을 판단하여
해당 부품의 오장착을 사전에 예방하였습니다 .
노
즐홀더에 삽입된 노즐의 형상을 인식하여 ANC의 홀에 잘못 배치된 노즐
로 인한 오류를 예방합니다.