5. SM411F_Operation_Training(Kor_Ver4).pdf - 第86页
3-28 Samsung Componen t Placer SM411/411N Operation Training 픽스카메라에서 부품을 인식하 기 위해 Z 축을 내리고 올리는 속도 또는 플라 이카메라가 부품을 인식하고 Z 축 이동높이까지 이 동하는 속도를 설정하는 항목입니다 . (Z 축 이동높 이 : 4~7mm) 기존 장비에서는 위 두 동작시 Z Place Down/Up 동작의 속도를 참조하여 이…
3-27
MMI
따라하기
Ⅱ
미소부품인 경우 이 값을 작게해야 하며 1005보다 작은 부품은 반드
시 포켓 Teach를 실시해야 부품의 버림율을 줄일 수 있습니다.
메 모 동시흡착의 조건
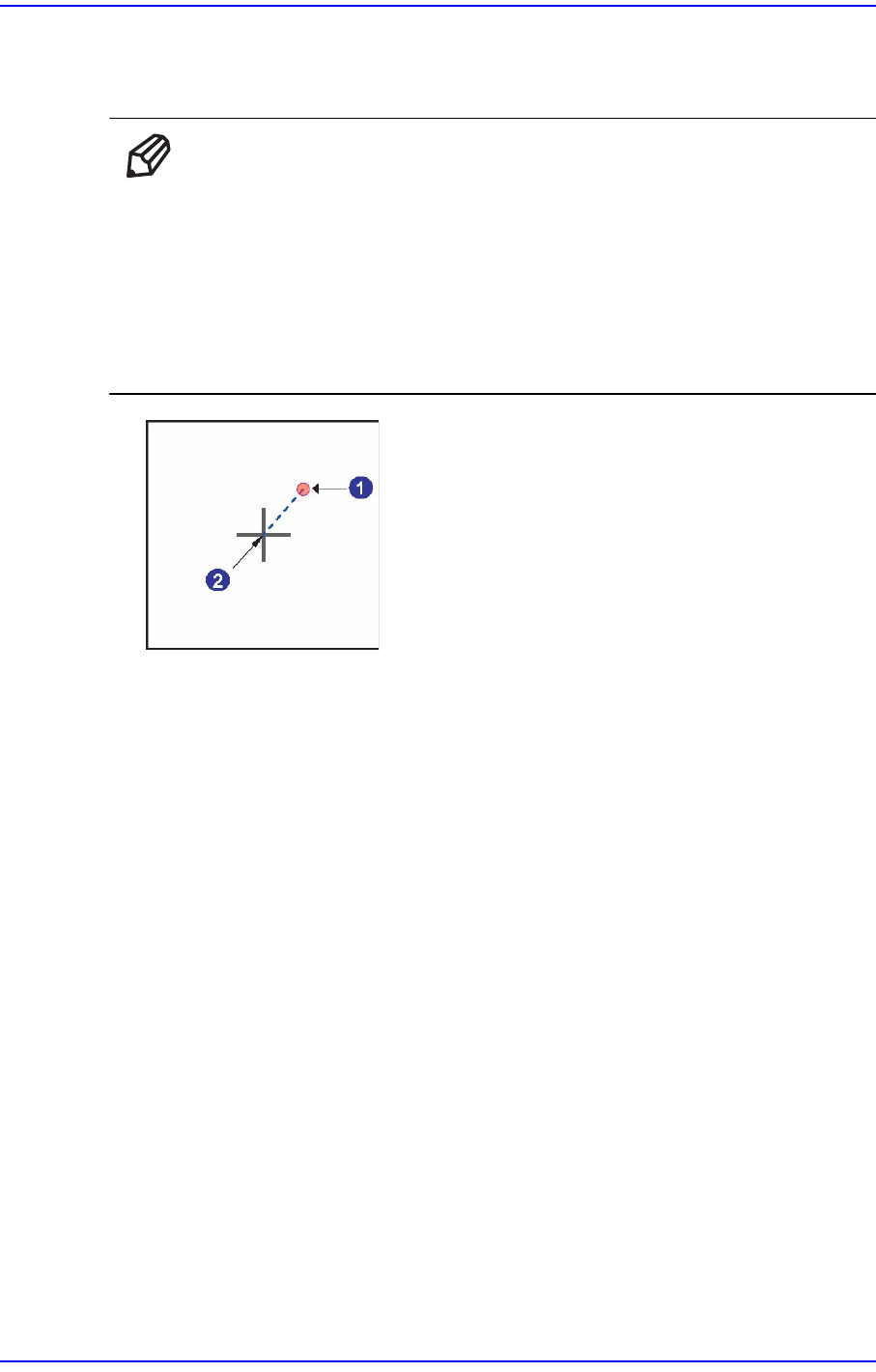
1. 흡착하는 헤드의 중심이 허용오차의 범위에서 부품을 흡착
해야 합니다.
2. 연동된 헤드의 경우에는 부품의 흡착시 R값이 같아야 합니
다.
3. X,Y의 최대 허용오차가 0.5 mm 이하이어야 합니다 .
여기서, 허용오차는부품의 Align Point에서 실제 흡착점인 헤드 중심까지의
Offset 을 의미합니다
1:
헤드
중심
(
실제
흡착점
)
2:
부품
Align Point
<Speed> 영역
흡착(Pickup), 장착(Place), 부품버림(Dump)작업을 할 때, 구동모터의 구동속도
를 설정합니다.
속도는 노즐의 종류, 부품의 무게, 부품의 흡착면적 등을 전체적으로 고려해서
해당 부품에 따라 적절하게 설정해야 합니다.
구동속도는 다음과 같고, 각 구동속도에 관한 속도 Profile은 System에 Setting되
어 있습니다.
1- Fastest: 가장 빠른 속도입니다.
2- Fast: 빠른 속도입니다.
3- Middle: 중간 속도입니다.
4- Slow: 느린 속도입니다.
5- Slowest: 가장 느린 속도입
니다.
<Z Align
Speed> 콤보박스

3-28
Samsung Component Placer SM411/411N Operation Training
픽스카메라에서 부품을 인식하기 위해 Z축을 내리고 올리는 속도 또는 플라
이카메라가 부품을 인식하고 Z축 이동높이까지 이동하는 속도를 설정하는
항목입니다. (Z축 이동높이: 4~7mm)
기존 장비에서는 위 두 동작시 Z Place Down/Up 동작의 속도를 참조하여 이
동하였습니다.
따라서 정도를 위해 Z Place Down/Up 속도를 느리게 설정하는 경우 Z축 인
식 높이까지 이동하는 동작이나 인식 후 플라이카메라에서 Z축 이동높이까
지 이동하는 동작도 느려질 수 밖에 없
었습니다.
이러한 단점을 극복하기 위해 위 두 동작의 속도를 지정하는 기능을 추가하
게 된 것입니다.
Z축 하강속도에 따른 흡착에러가 발생하기 쉬운 미소부품의 경우, 여기서
값을 변경하여 인식테스트를 실시하고 인식이 성공했을 때의 값을 설정하여
부품을 등록하십시오.
<Etc> 영역
<Dump Angle> 콤보박스
0,45,90,135,180,225,270,315
<Mou
nt Method> 콤보박스
<V
acuum Check> 체크박스
부품을 흡착하
거나 장착 할 때, 먼저 공압을 확인하려면 선택합니다 . 미소
칩은 크기가 아주 작기 때문에 실 장착이 완료된 후, 실제 장착이 되지 않더
라도 후 공정에서 이런 오류를 검출하기도 어려울 뿐만 아니라, 이것을 다시
장착하는데도 많은 노력이 필요합니다. (1608칩 이하 적용)
이 기능을 사용하면, 장비는 부품을 흡착할 때의 압력을 기억하고 부품을 최
종적
으로 장착 할 때의 압력을 기억된 압력과 비교하여 차이가 발생이 되었
는지 여부를 확인합니다.
만일, 차이가 발생되면 헤드가 부품을 흡착해서 장착점으로 이동하는 중 어
떤 이유로 인해 떨어졌을 수도 있습니다.
<Z Align Speed> 콤
보박스
픽스카메라에서 부품
을 인식하기 위해 Z축을 내리고 올리는 속도 또는 플라
이카메라가 부품을 인식하고 Z축 이동높이까지 이동하는 속도를 설정하는
항목입니다.
기존 장비에서는 장착시 Z축 하강 및 상승 속도를 참조하여 이동하였습니다
따라서 정도를 위해 장착시 Z축 하강 및 상승 속도를 느리게 설정하여 사용
하는 경우 인식을 위해 픽스카메라에서 동작하는 모션이나 인식 후 플라이
카메라에서 Z축 이동높
이까지 이동하는 동작도 느려질 수 밖에 없었습니다

3-29
MMI
따라하기
Ⅱ
.
이러한 단점을 극복하기 위해 위 두 동작의 속도를 지정하는 기능을 추가하
게 된 것입니다.
Z축 하강속도에 따른 흡착에러가 발생하기 쉬운 미소부품의 경우, 여기서
값을 변경하여 인식테스트를 실시하고 인식이 성공했을 때의 값을 설정하여
부품을 등록하십시오.
<Insp Only Zero(제로만 검사)> 체크박스
특정 부품의 경우, 부품
을 인식할 때, 부품이 노즐에 흡착된 방향에 따라 인
식율에 차이가 발생하는 경우가 있습니다.
이 때 , 인식율이 좋은 방향을 기준으로 해당 부품을 등록하고 이 기능을 선택
하면, 해당 부품을 인식할 때 항상 등록된 각도로 부품을 인식합니다. TR 이
나 IC 부품에 주로 적용됩니다.
<S
oft Touch>콤보박스
부품의 흡착 및 장착시 적용할 수 있으
며, <속도> 영역에서 설정한 속도와
는 무관하게 장착 및 장착시 헤드가 하강할 때, PCB상면으로부터 2mm 높이
에서 Z축의 속도가 4(Slow)가 되도록 합니다 .
즉, Z축에 대해 2단계로 속도를 제어하는 것을 말합니다. 예로 부품에 잦은
크랙이 발생한다면, Z축의 전체적인 스피드를 줄일 수 있겠지만, 이럴 경우
전반적인 효율은 떨어집니다.
예를 들어, 기존 장비
에서 속도 4단계로 안정된 흡착을 하는 부품이 있다고
가정하면 기존 장비는 부품 흡착 완료 높이까지 4단계의 속도로 이동해야
하나, 이 기능을 사용하면 흡착속도를 1단계로 설정해도 흡착하는 순간에는
4단계의 속도로 2mm까지 들어 올리고 나머지 이동 구간은 1단계의 속도로
이동하게 됩니다.