JM-10维修调整要领书.pdf - 第30页
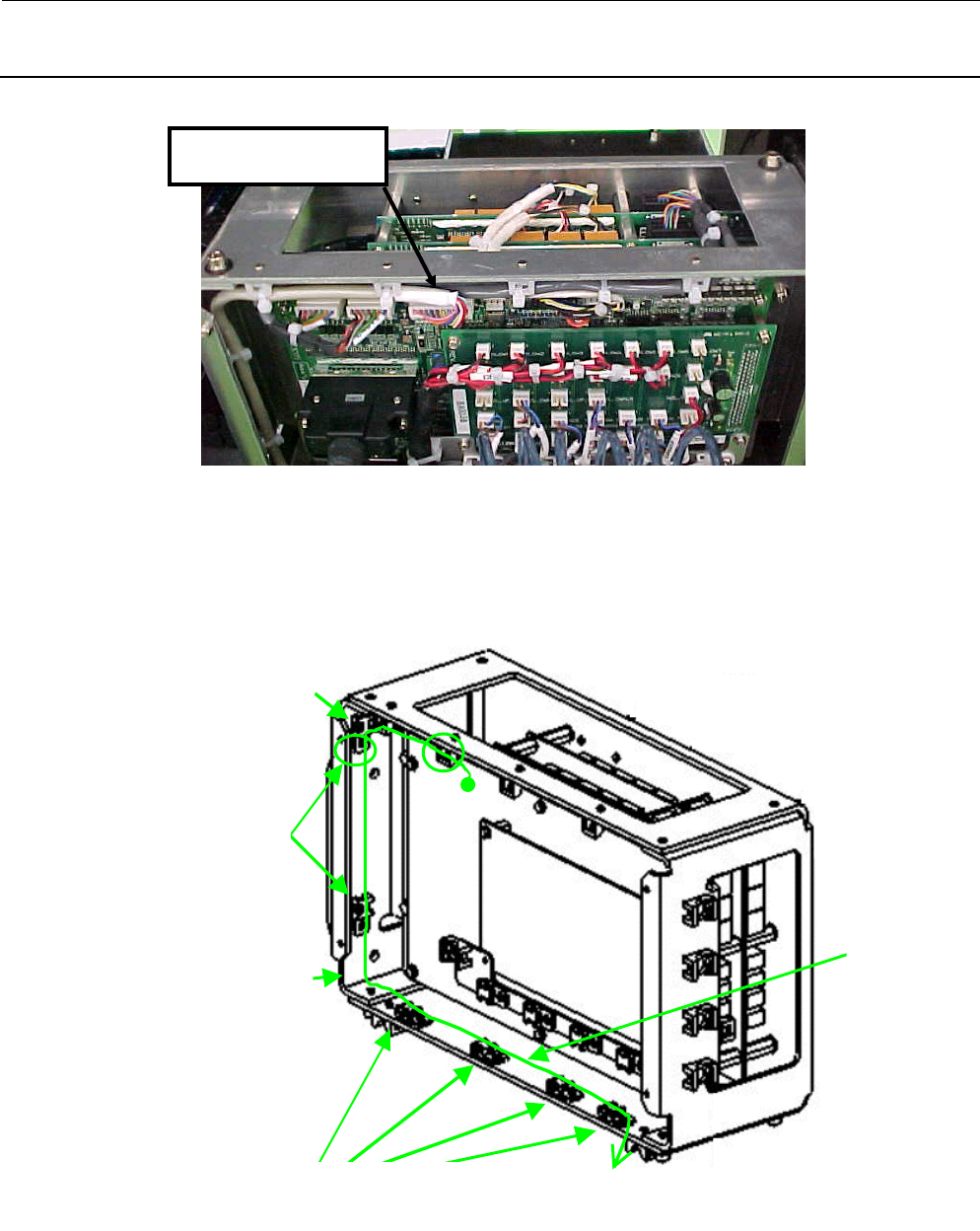
维修调整要领书 1-23 图 1-5-8-2 图 1-5-8-3 OCC CABLE A SM OCC CABLE ASM 用束线箍捆束在固定座上。 用束线箍捆束在固定 座上。 为了便于更换电路板, 此处 沿 BOX 配线,以免接触螺钉。 为了便于更换电路板, 此处 沿 BOX 配线,以免接触螺钉。
维修调整要领书
1-22
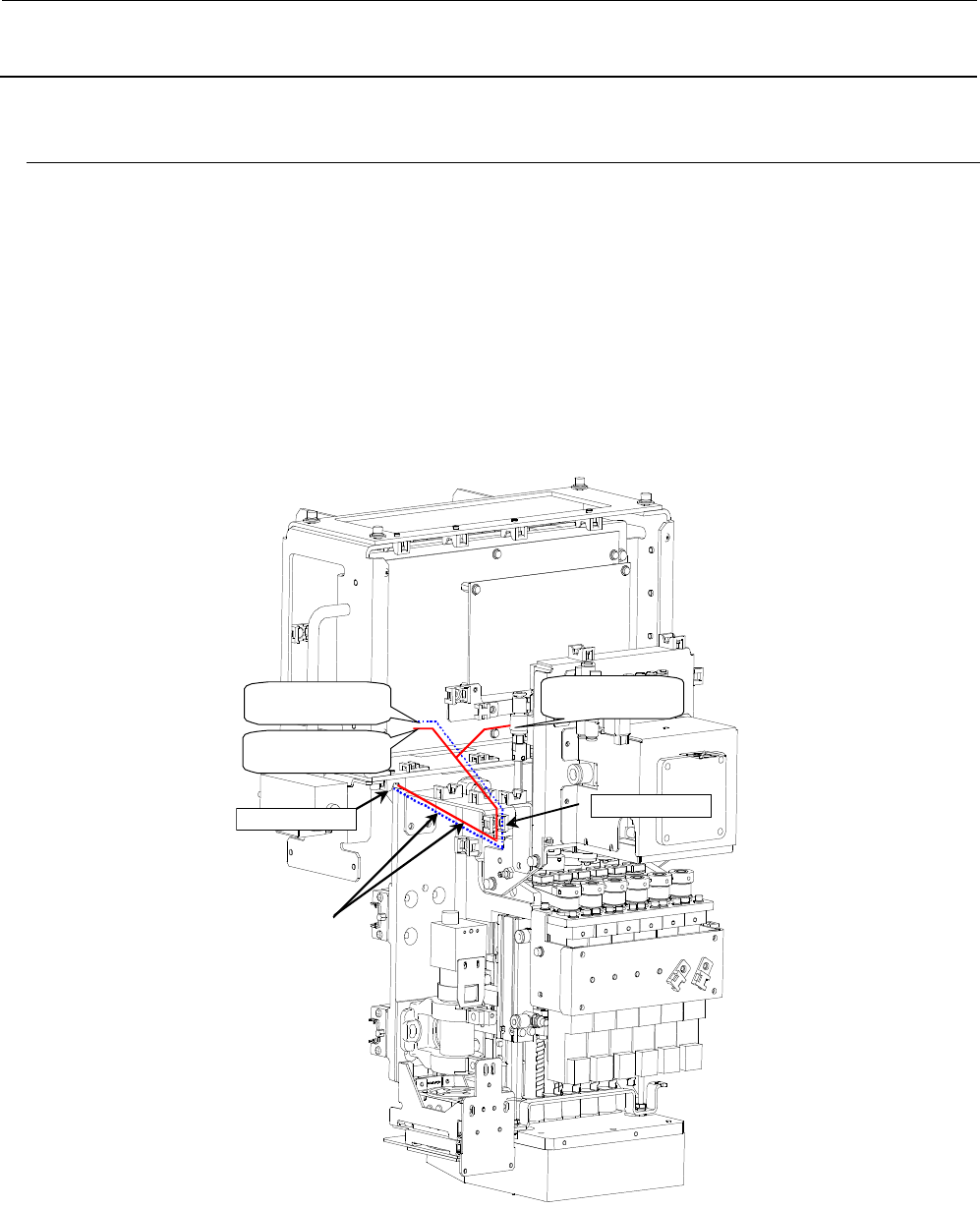
1-5-8.贴片头周围的配线
将来自 XY 拖链电缆(40076787)的各个束线连接到以下部位。
CN901、CN905、CN908 插入图示部位。(参照图 1-5-8-1)
1) OCC CABLE ASM 请参照图示进行配线。(参照图 1-5-8-2、1-5-8-3)
2) 将 XY 拖链电缆的插头“ZTA-CNP1” 、“ ZTB-CNP1”插入图示位置。(参照图 1-5-8-5、1-5-8-6)
3) 1394 机器人电缆线按图示的路线配置,穿过贴装头右侧与来自 LNC 的连接器中继连接。(参照
图 1-5-8-4)
4) OPTICAL FIBER CABLE 7M 是在 HEAD MAIN PCB BR 与 ZTA SERVO AMP 之间配线,插入 CN1。
(参照图 1-5-8-7、1-5-8-8)
①
连接至
HEAD MAIN
电路板的
CN5
用束线箍固定
用束线箍固定
连接至
HEAD MAIN
电路板的
CN1
连接至
HEAD MAIN
电路板的
CN8
图 1-5-8-1
① XY BEAR CABLES ASM
维修调整要领书
1-23
图 1-5-8-2
图 1-5-8-3
OCC CABLE ASM
OCC CABLE
ASM
用束线箍捆束在固定座上。
用束线箍捆束在固定
座上。
为了便于更换电路板,此处沿
BOX 配线,以免接触螺钉。
为了便于更换电路板,此处沿
BOX 配线,以免接触螺钉。

维修调整要领书
1-24
图 1-5-8-4
图 1-5-8-5 图 1-5-8-6
用束线箍捆束在固定座上。
用束线箍捆束在固定座上。
1394 ROBOT CABLE ASM
ZTA SERVO AMP
ヘッド前方側
ヘッド後方側
ZTA-CN4A
ZTA-CN4B
ZTA-CN4C
ZTA-CN4D
ZTA-CN5
ZTB-CN4D
ZTB-CN5
ZTB-CN4C
ZTB-CN4B
ZTB-CN4A
ZTB SERVO AMP
ZTA-CNP1
ZTB-CNP1
Head 后方侧
Head 前方侧
「ZTA-CNP1」 、「 ZTB-CNP1」