OM-1466-001_w.pdf - 第34页
31 6. 運転方法 6. 運転方法 6.1 運転方法設定 運 転 方法 タ ブ メ ニュ ーの “ 運 転 方 法設 定 ” ( 6 ペ ー ジ 目 ) を 開き 、 “ リー ド浮き検出機能 ” を設定します。 [1] [2] Fig. 6 運転方法設定 (6 ページ目 ) [1] リード浮き検出機能 リード浮き 検出機能を “ 使用しない ” また は “ 使用する ” から 選択します。 使用しない リード浮き検出を使用しません…
30
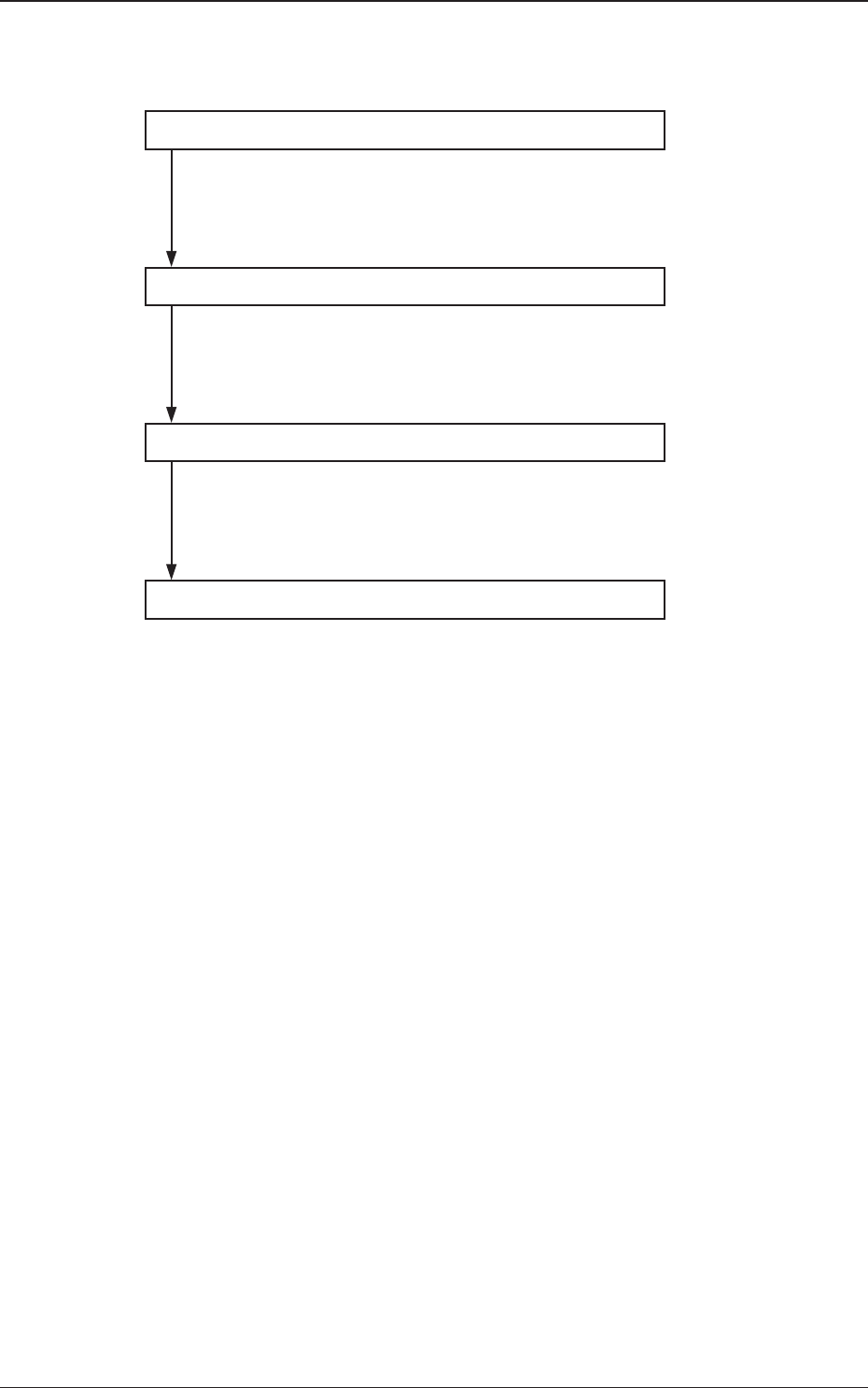
5. リード浮き検出設定手順
運転方法の設定
部品ライブラリ[制御]の設定
部品認識テスト
自動運転
•
運転方法の設定を行います。
詳細については“6. 運転方法”を参照して
ください。
•
部品ライブラリ [ 制御 ] の設定を行います。
詳細については“7. 部品ライブラリ”を参
照してください。
•
部品認識テストにて確認を行います。
詳細については “10. 部品認識テスト ” を
参照してください。
5. リード浮き検出設定手順
0710-001
31
6. 運転方法
6. 運転方法
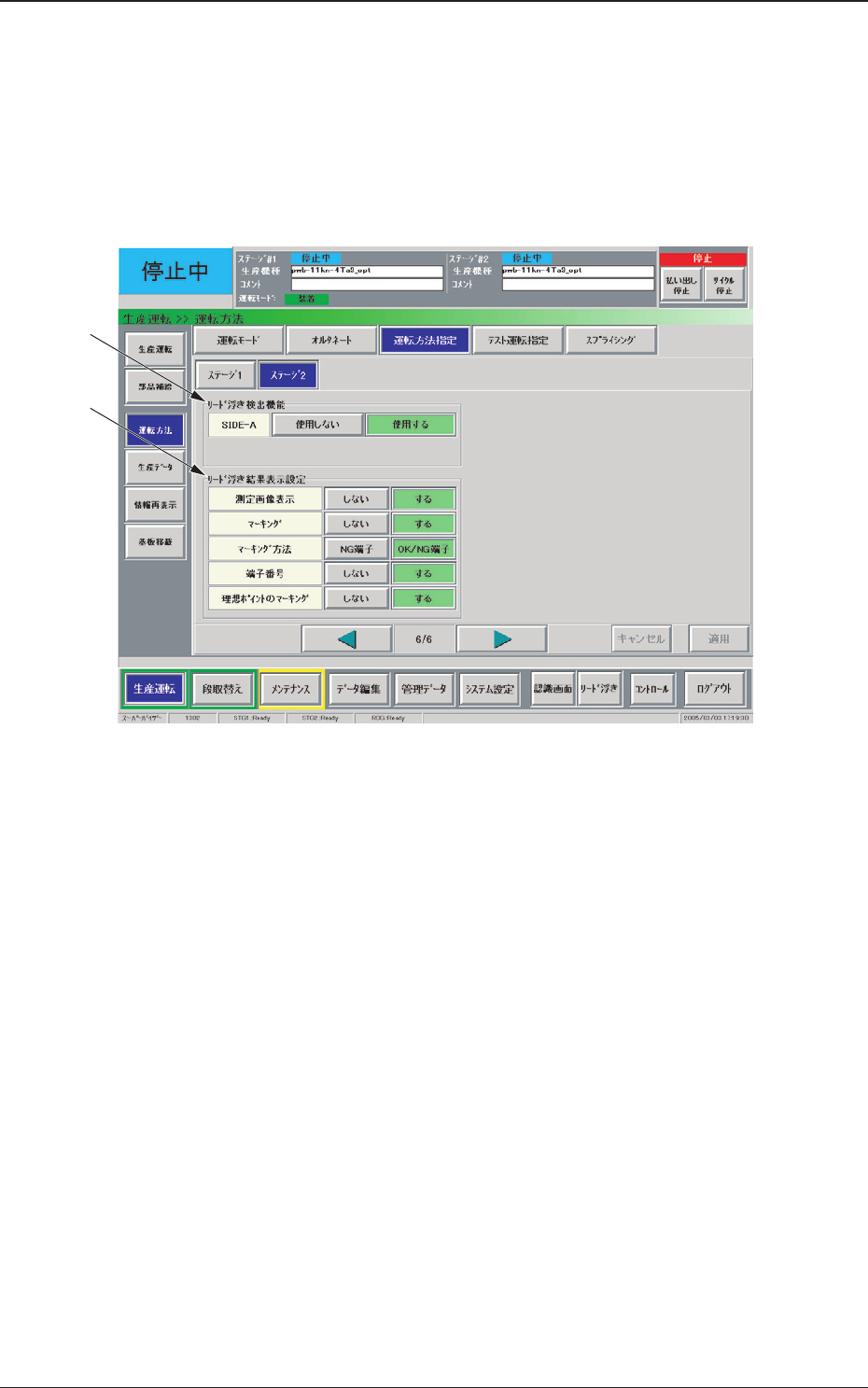
6.1 運転方法設定
運転方法タブメニューの“運転方法設定”(6ページ目)を開き、“リー
ド浮き検出機能 ” を設定します。
[1]
[2]
Fig. 6 運転方法設定 (6 ページ目 )
[1] リード浮き検出機能
リード浮き検出機能を“使用しない”または “ 使用する ” から
選択します。
使用しない
リード浮き検出を使用しません。
使用する
リード浮き検出を使用します。
0710-001

32
6.1 運転方法設定
[2] リード浮き結果表示設定
リード浮き測定結果画像を、リード浮き検出ユニットのモニタ
出力に表示する際の設定を行います。
測定画像表示
しない
リード浮き検出ユニットのモニタ出力に測定画像を表示しま
せん。
する
リード浮き検出ユニットのモニタ出力に測定画像を表示しま
す。
マーキング
しない
検出した端子の位置表示を行いません。
する
検出した端子の位置表示を行います。
マーキング方法
NG 端子
NG の端子のみ赤色でマーキングします。
OK/NG 端子
NG の端子は赤色で、OK の端子は緑色でマーキングします。
端子番号
しない
端子番号の表示を行いません。
する
検出した端子の近くに青色で端子番号の表示を行います。
理想ポイントのマーキング
しない
理想的なリード位置のマーキングを行いません。
する
部品形状から得られる理想的なリード位置に黄色のマーキン
グを行います。
0710-001