OM-1466-001_w.pdf - 第47页
44 8.2 リード浮きテスト [4] [ 部品認識結果補正 ] ボタン カメラによる部品認識結果により位置補正を設定します。 このボタンを押すと以下の画面が表示されます。 Fig. 17 部品認識テスト [ 補正あり ] ボタン 部品認識結果の位置補正を行います。 [ 補正なし ] ボタン 部品認識結果の位置補正を行いません。 0710-001
43
8.2 リード浮きテスト
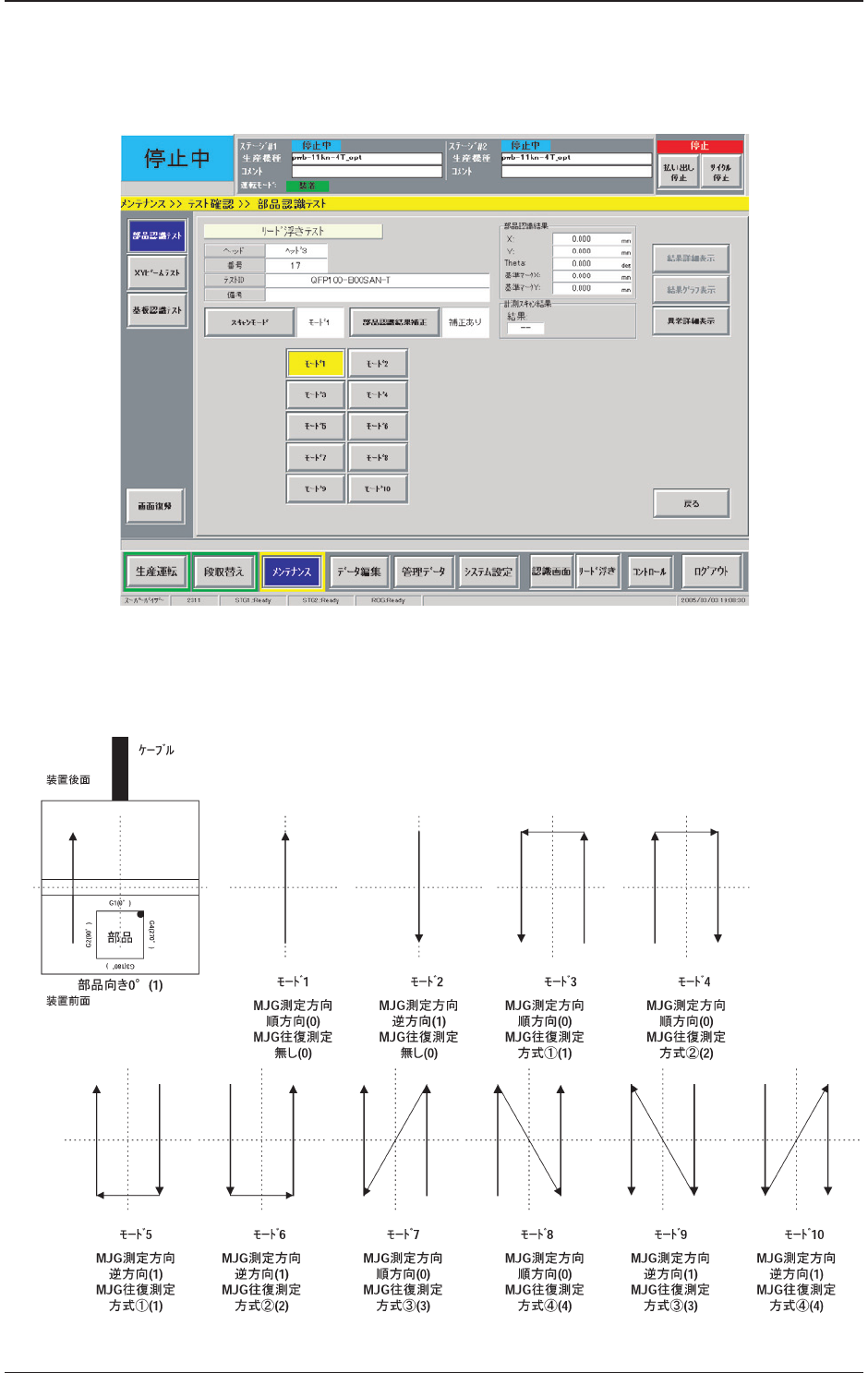
[3] [ スキャンモード ] ボタン
計測スキャンのモードを設定します。
このボタンを押すと、以下の画面が表示されます。
Fig. 15 スキャンモード
[ モード 1] ~ [ モード 10] ボタンは、以下の動作を行います。
Fig. 16 スキャンモードの動作
0710-001
44
8.2 リード浮きテスト
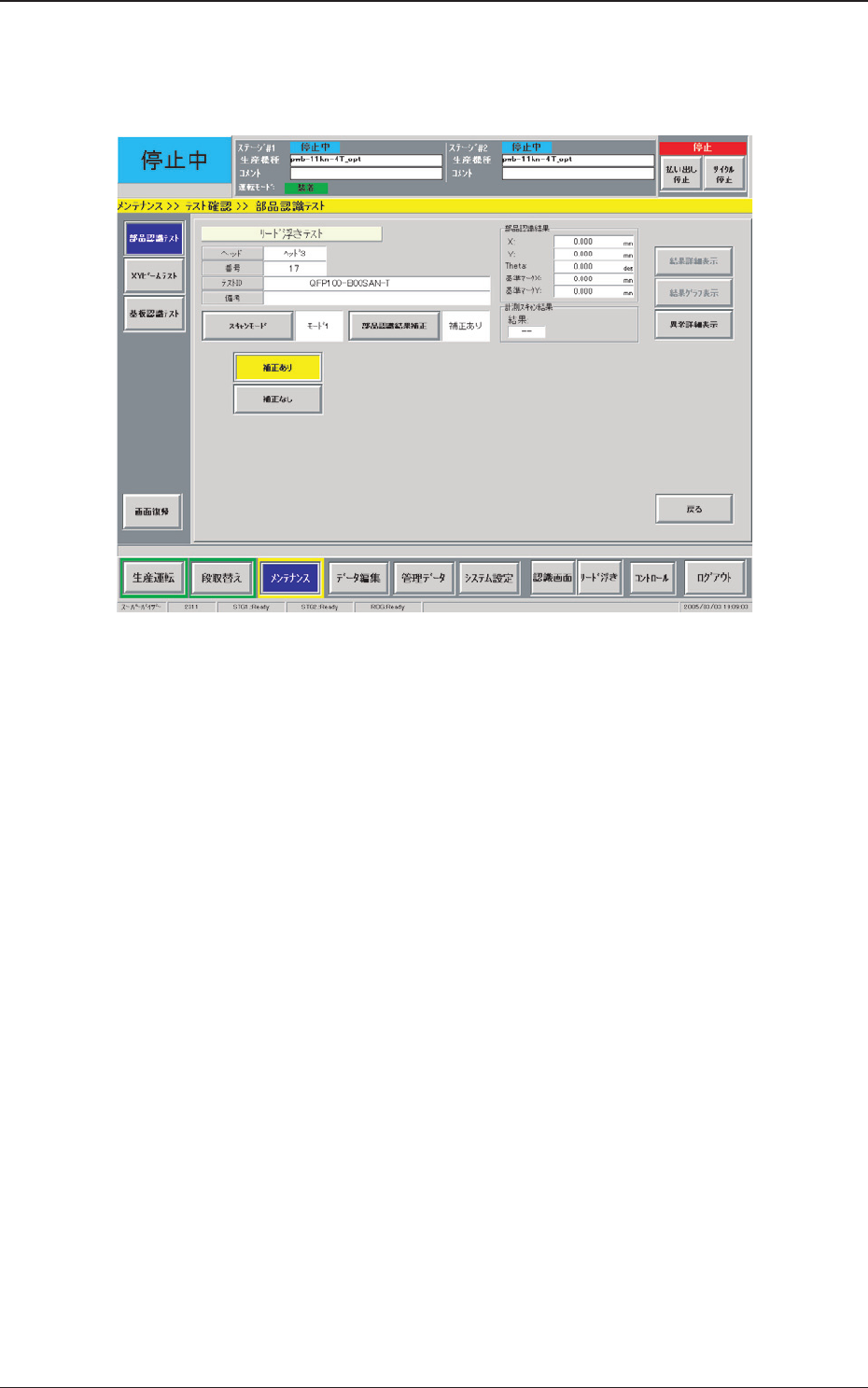
[4] [ 部品認識結果補正 ] ボタン
カメラによる部品認識結果により位置補正を設定します。
このボタンを押すと以下の画面が表示されます。
Fig. 17 部品認識テスト
[ 補正あり ] ボタン
部品認識結果の位置補正を行います。
[ 補正なし ] ボタン
部品認識結果の位置補正を行いません。
0710-001
45
8.2 リード浮きテスト
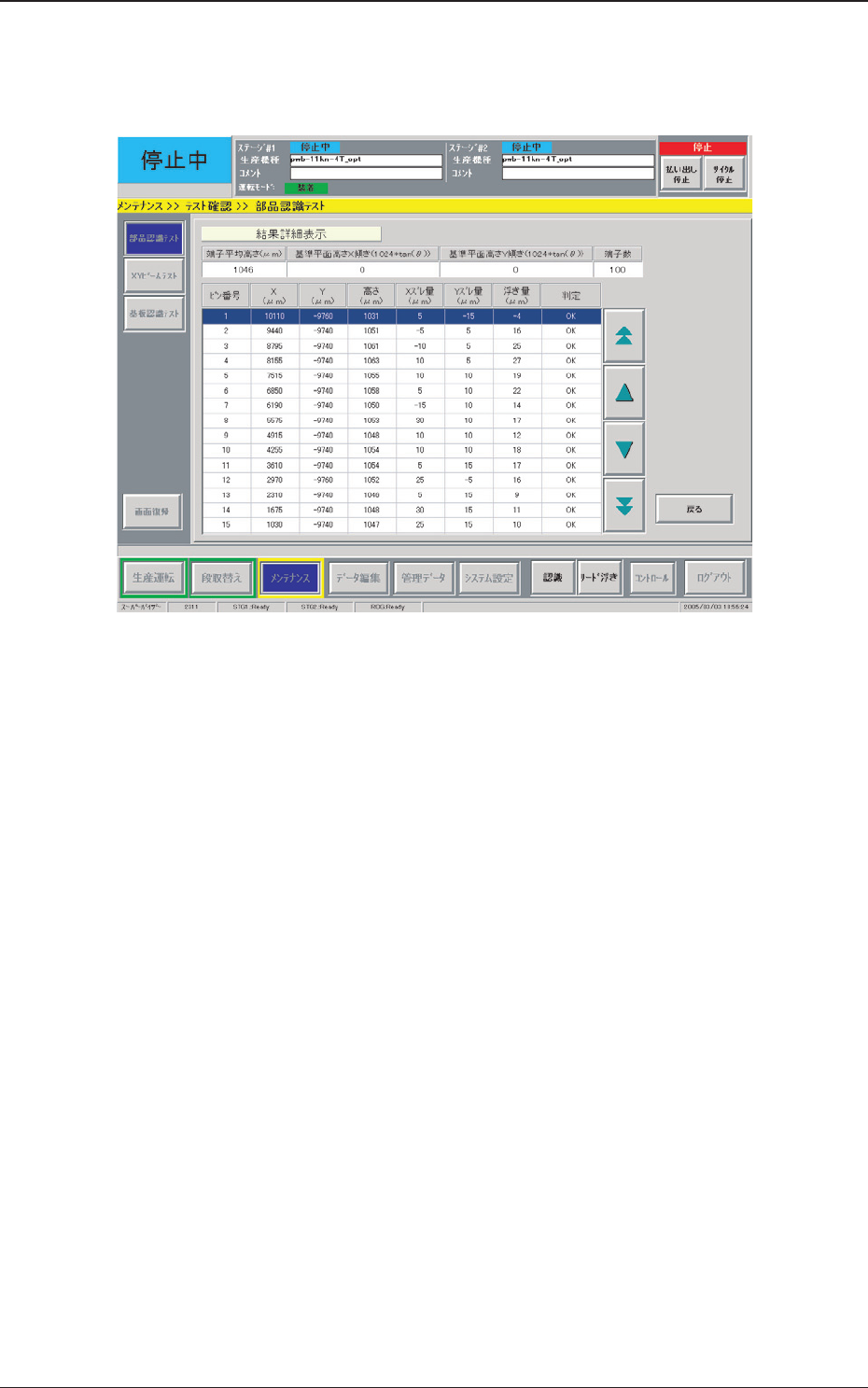
[5] [ 結果詳細表示 ] ボタン
各端子ごとの計測結果を表示します。
このボタンを押すと以下の画面が表示されます。
Fig. 18 結果詳細表示
リード浮き結果表示
端子平均高さ (
µ
m)
各端子の高さの平均値を表示します。
基準平面の X 傾き (1024*tan(
θ
))
X 方向の傾きを
θ
=Tan-1 (x/1024) を満たす x の値で表示され
ます。
基準平面の Y 傾き (1024*tan(
θ
))
Y 方向の傾きを
θ
=Tan-1 (x/1024) を満たす x の値で表示され
ます。
端子数
検出した端子数が表示されます。
0710-001