6OM-1732-001Y_F8_元件数据库.pdf - 第97页
6OM-1732 2-2-57 (C01_02) 认识 ( 识别 ) 数据设定 从以下选择每个元件形状的各识别数据的设定方法。 自动 : 自动设为预置初期值。 手动 : 可以手动设定各识别数据。 • 对象元件 :适用于所有对象元件。 Note (a) 通常请选择 “ 自动 ” 。 (b) 将识别数据设定为 “ 自动 ” 时,各数据被自动设定为下表。 表中的 “ 自动 ” 设定值,记载在各数据项目中。 Tab…
6OM-1732
2-2-56
2.3 (C01) 认识 ( 识别 ) 数据
(C01_01) 照明方式
从以下选择元件识别的照明方式。
透过方式
反射方式
•
对象元件 :适用于所有对象元件。
Note
进行透过识别时,需要透过用吸嘴。
1206-001
2.3 (C01) 认识 ( 识别 ) 数据
6OM-1732
2-2-57
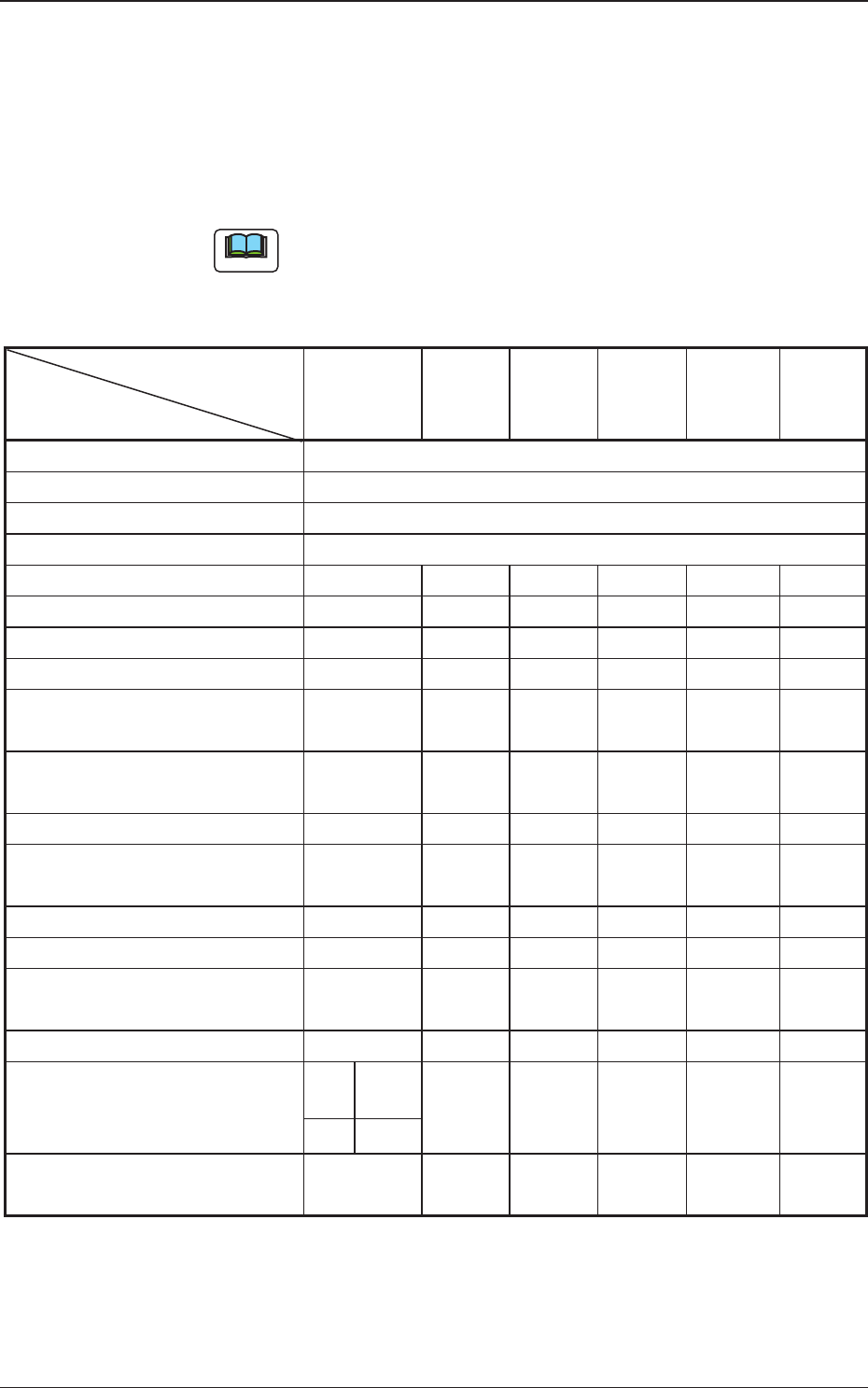
(C01_02) 认识 ( 识别 ) 数据设定
从以下选择每个元件形状的各识别数据的设定方法。
自动:自动设为预置初期值。
手动:可以手动设定各识别数据。
•
对象元件 :适用于所有对象元件。
Note
(a)通常请选择
“
自动
”
。
(b)将识别数据设定为
“
自动
”
时,各数据被自动设定为下表。
表中的
“
自动
”
设定值,记载在各数据项目中。
Table 6B24
元件形状
数据项目
圆筒、
方形、
异形
IC 连接器 其他 BGA/CSP 特殊
设定亮度数据 标准
认识处理水平 0
认识 ( 识别 ) 算法 自动
点灯方式指定 自动
指定照片拍摄 ( 图像摄像 ) 方法 不判断 不判断 不判断 不判断 不判断 不判断
视野指定 自动选择 不判定 不判定 不判定 不判定 不判定
元件尺寸允许值设定 自动 - - - - -
管脚 ( 引脚 ) 宽度判定 - 不判定 不判定 不判定 - -
管脚 ( 引脚 ) 位置 ( 宽度方向 )
判定
- 判定
(自动 )
判定
(自动 )
判定
(自动 )
- -
管脚 ( 引脚 ) 位置 ( 长度方向 )
判定
- 不判定 - - - -
外形尺寸判定 - 不判定 - - - -
电极位置判定 - - - - 判定
(自动 )
-
电极尺寸判定 - - - - 不判定 -
全球形检出 - - - - 判定 -
球形有无检出方法 - - - - 判定
(自动 )
-
极性判定 - 不使用 不使用 不使用 不使用 -
正反面判定
圆筒 方形
异形
不使用 不使用 不使用 不使用 不使用
-
不判定
形状位置判定 - - - - - 判定
(自动 )
1206-001
2.3 (C01) 认识 ( 识别 ) 数据
6OM-1732
2-2-58
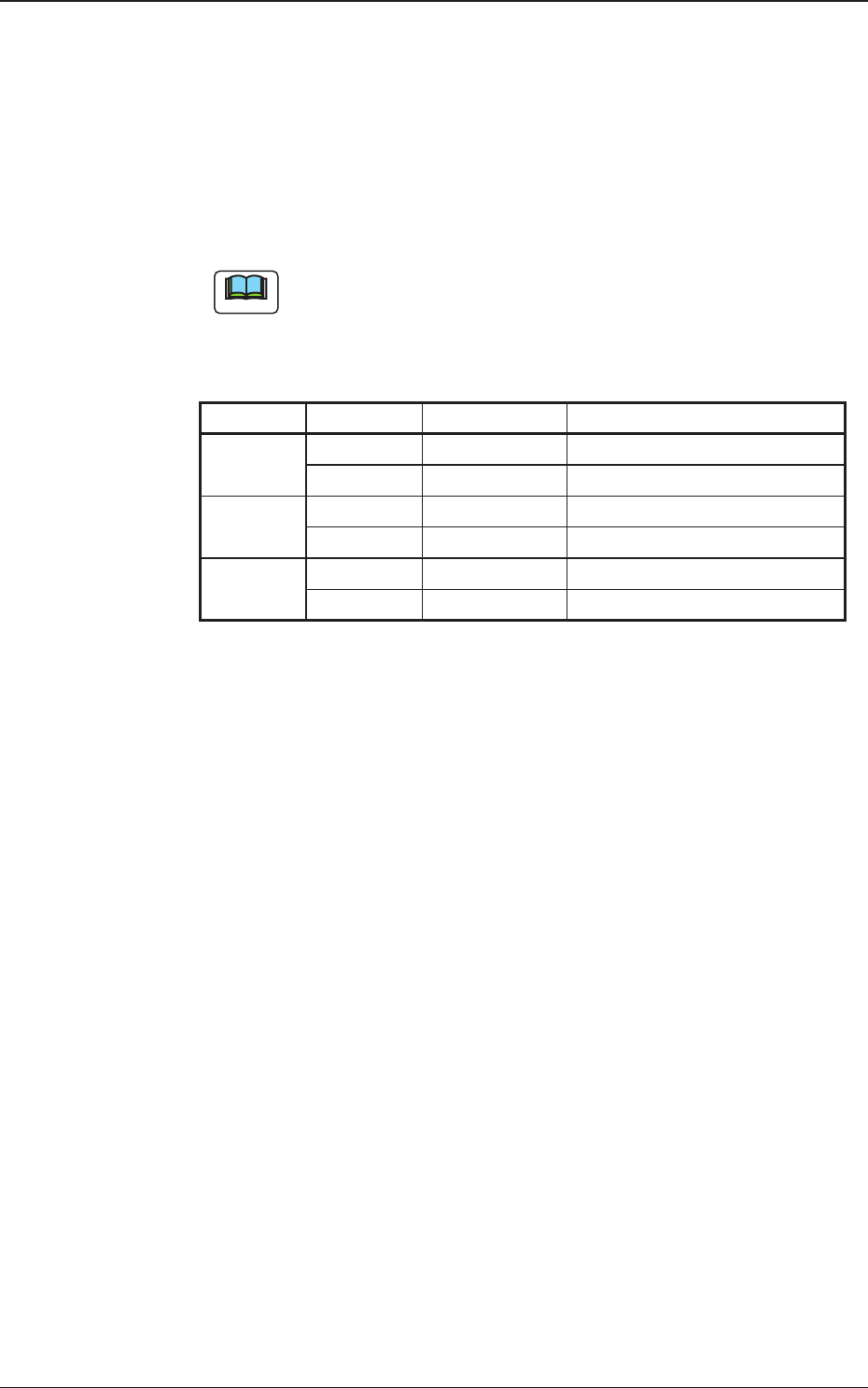
(C01_03) 认识处理水平 ( 识别处理水准 )
设定检查元件的识别处理水准。
通常请设定为
“
0
”
。
•
数据设定范围
0 ~ 255
•
对象元件 :适用于所有对象元件。
Note
(a)引脚算法自动设定值
识别数据设定为
“
自动
”
或识别处理水准为
“
0
”
时的粗略识别方
法见下表。
Table 6B25
元件形状 引脚种类 粗略识别方法 备 注
IC 无引线 电极 检出方法重心位置检出
上述以外 一般引脚 检出方法引脚边缘检出
连接器 电极 电极 检出方法引脚形状检出
上述以外 一般引脚 检出方法引脚形状检出
其他 电极 电极 检出方法引脚形状检出
上述以外 一般引脚 检出方法引脚形状检出
(b)设定值在
“
1
”
以上时,请将识别数据设定设为
“
手动
”
。
1206-001
2.3 (C01) 认识 ( 识别 ) 数据