DEK高级培训资料.pdf - 第85页
CAN Dev ices A p p l i c a t i o n ( I / O - d r i v e - s e ns o r ) M e s s a g e F i l t e r • CAN bus compon ents : – I/O Nodes – Se rvo Nodes Issue 2: July 2007 T r a ns m i tte r R e c e i ve r C A N B us – Se rvo …

CAN Features
• Uses Line topology partcipants are connected parallel via
bus(DEK)
•
Data transmission speed of 500 Kbit/sec (DEK)
•
Data exchange:Each device (Node) may send data if bus
Issue 2: July 2007
•
Data exchange:Each device (Node) may send data if bus
is not occupied
• COB’s are read by all Nodes but any action is only
performed by the addressed Node(s)
•
A COB-ID (COB identifier) determines the receiving
Nodes address and the priority of the message
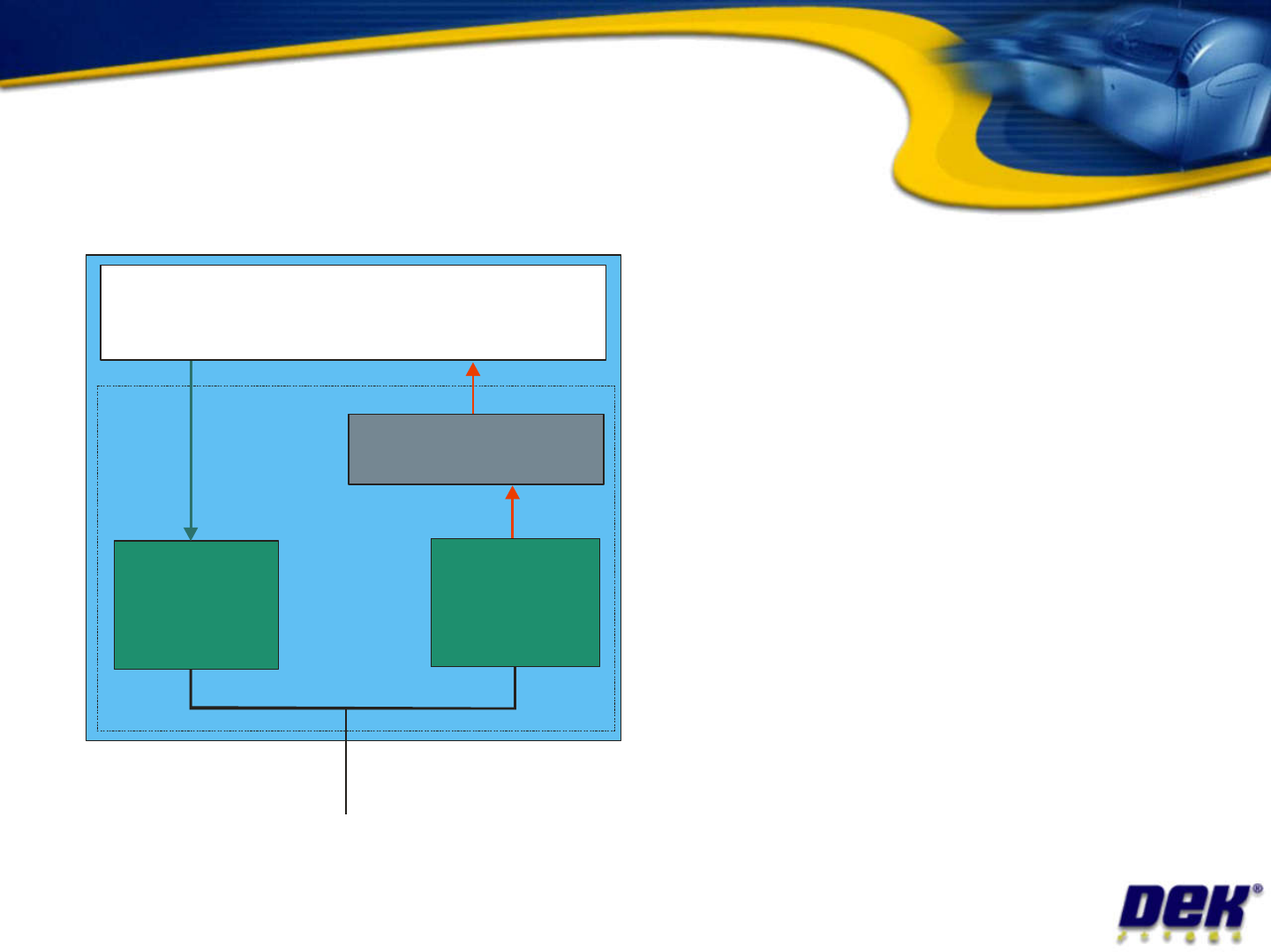
CAN Devices
Application (I/O - drive - sensor)
Message Filter
•
CAN bus
components
:
– I/O Nodes
– Servo Nodes
Issue 2: July 2007
Transmitter
Receiver
CAN Bus
– Servo Nodes
– CAN Transceiver
(on board
Nextmove ES)
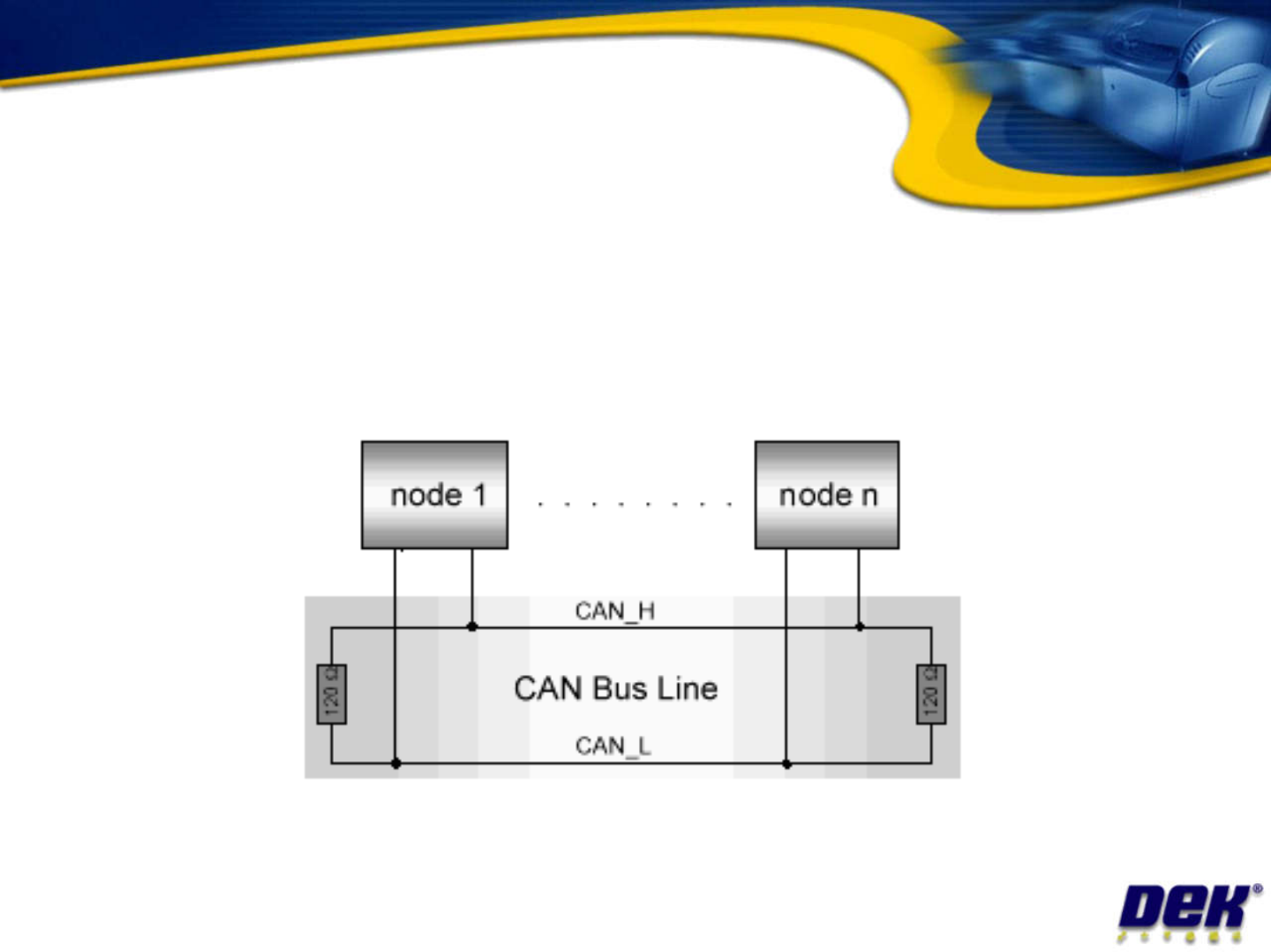
CAN bus theory
Controller Area Network
CAN
Issue 2: July 2007