MX系列中文说明书.pdf - 第84页
第 1 章 开始程序 1-67 [Place Dat a Tab] • Index ( 顺序号 ) : 这是 Place da ta tab 的作业 point 数,如果有3 0 0 个p o i n t ,那么 index 也记录 1 ~ 300 。 • Step ( 步 ) : 为使 Front & Rear Gen try 对部件进行 Pick&Place 而设置的移动次数。 • Use ( 使用与否 ) : 表示…
Mx Series
Manual
1-66
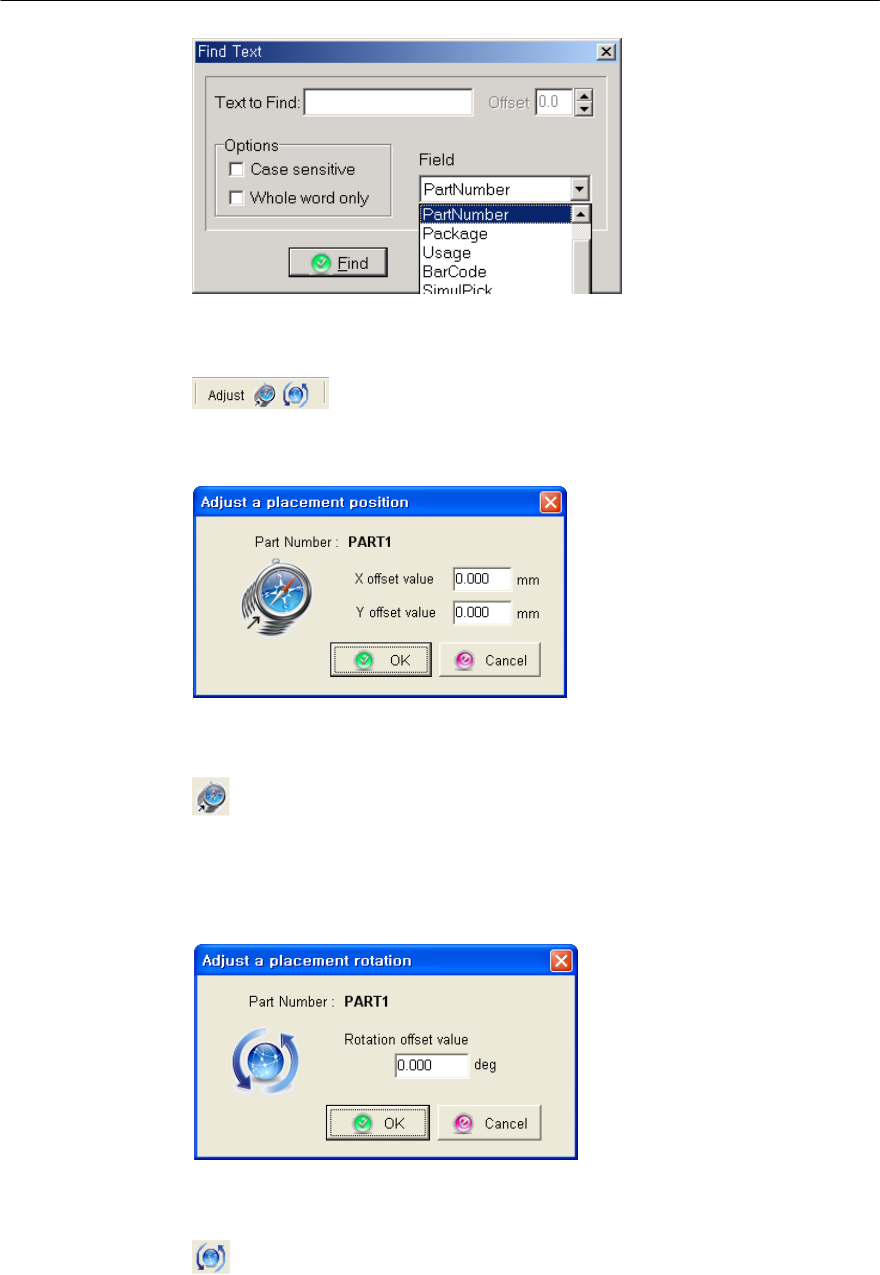
图1-57Find(搜索)功能>
对Adjust(调整)菜单加以说明。
图1-58 Adjust Position(坐标修改)功能>
: 这是Adjust position(坐标修改)功能,把贴装位置,即X, Y位置,利用相同的
Offset,能够同时修改1个或多个X , Y位置。使用条件主要是在移动对象同时发生错
误时使用。
图1-59 Adjust rotation(角度修改) 功能>
: 这是Adjust rotation(角度修改)功能,利用相同的Offset同时修改1个或多个贴
装位置的R值时使用。
第
1
章
开始程序
1-67
[Place Data Tab]
•
Index (顺序号) : 这是Place data tab的作业point数,如果有300个point,那么
index也记录1 ~ 300。
•
Step (步) : 为使Front & Rear Gentry对部件进行Pick&Place而设置的移动次数。
•
Use (使用与否) : 表示相关作业Point是否进行作业。Yes : 做作业,, No : 不做作
业。
•
PickOrd (拾取顺序) : 在Feeder中,拾取部件时Head之间的顺序。
•
Camera (检查用摄像头) : 表示为识别部件而使用的Camera。
•
CamPos (检查位置) : 用Vision检查部件时的部件检查位置。Side是指在一个模块
中检查2个喷嘴的情况,Center是指在一个Camera中检查一个喷嘴。(使用chip
部件,异型部件时增加意义)
•
NzNo (喷嘴编号) : 是Nozzle No。 system setup的ANC Setting状态Nozzle的
各Hole编号
•
NzType (喷嘴种类) : 表示在ANC中设置的与NzzNo相对应的喷嘴Type。
•
Mark (个别标记的使用与否) : 这是Component Fiducial功能,进行精度高的部件
作业时,可以识别作业部件坐标周围的Mark,提高部件作业精度时使用。
(例 : QFP 208 pin , BGA等贴装精度高的部件)
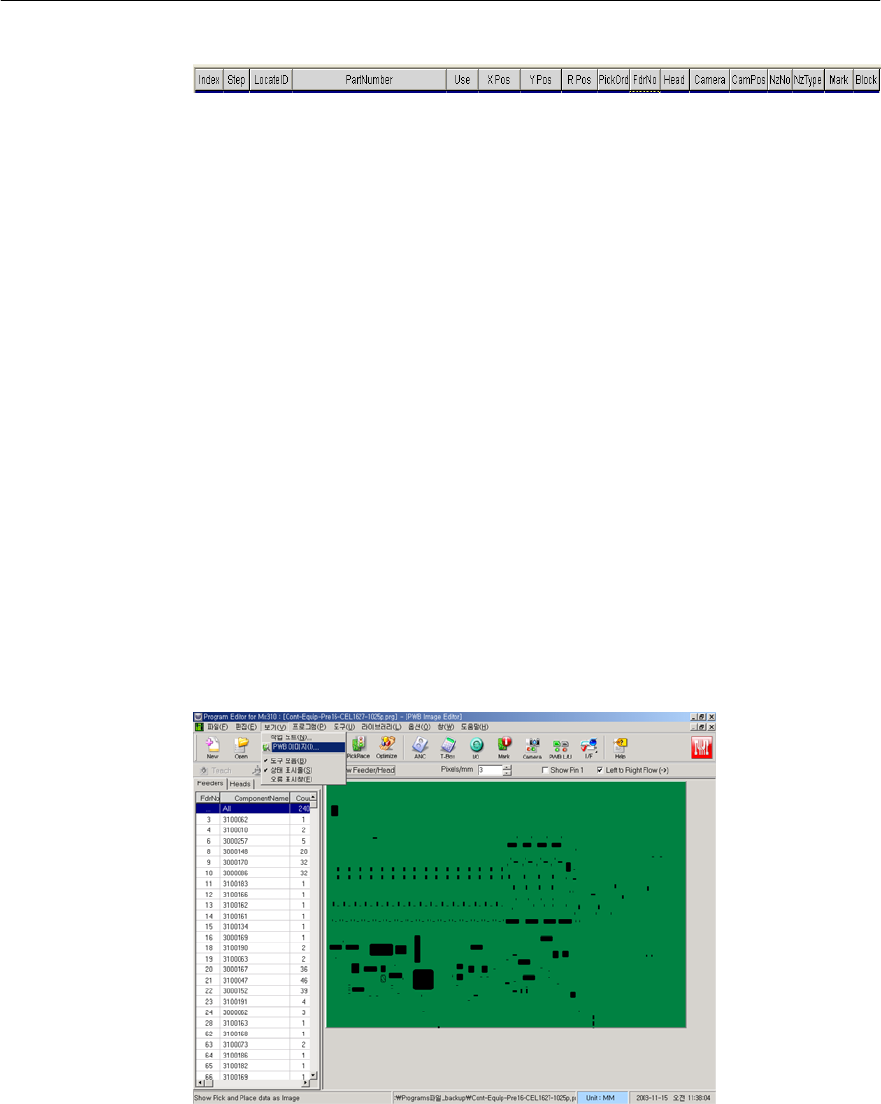
图1-60 PWB 图像画面>
* PWB图像 (通过基板图像查看) : 存在于视图菜单下端,是可以查看Production
(生产)时插入与否的功能,用户编制的程序以图像化的形式予以显示。
Mx Series
Manual
1-68
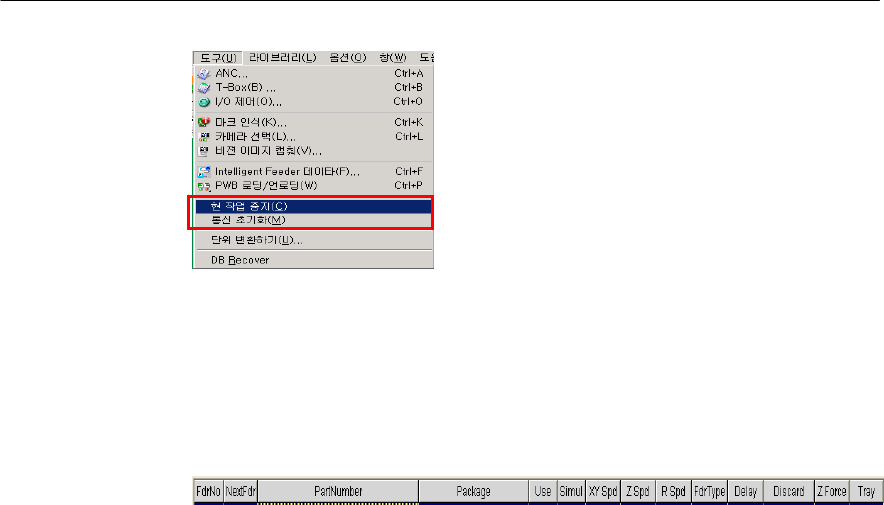
图1-61 工具菜单>
工具菜单下端的中止作业及通信初始化功能在发生与普通的软件相关的Error时使用,
主要是在向MCS要求运行,未结束的情况下取消该运行时使用。
[Pick Data Tab(拾取数据窗口)]
•
FdrNo (Feeder number) : 如果各个部件供料器编号在Optimize run以后产生,那
么对供料器坐标进行Teaching。
•
NextFdr (Next feeder) : 这是在使用TFU&TSU 时,如果使用相同的Part
number ,那么可以在Tray之间进行连接的功能。
•
Use : 表示各供料器的作业与否 (yes , no)。
•
Simul (Simultaneous pickup) : 表示部件是否要同时Pickup (拾取),只可以使用
8mm供料器。(Yes, No)
•
Discard (Discarding position) : 这是因Vision或气压Error而抛弃部件的位置。
- Discard : 8 ~ 56mm , Stick
- PickPos (Pickup position: 拾取位置) : 在TFU,MTF及TSU中使用。
※ 检查失败时,把部件重新放回原位置。
直接 Teaching
(直接输入)
Intelligent Feeder Data(振动供料器数据)
※ 这是在设备上安装供料器后,为修改供料器数据而设置的画面。
实行工具/ Intelligent Feeder数据菜单。