00198170-03_Technical_Training_FSE_TX-Series_DE.pdf - 第133页
8 Steuerung und Kommunikation 8.1 Kommunikation - Umfassende Übersicht Technisches Training FSE SIPLACE TX-Series 08/2018 133 8 Steuerung und Kommunikation 8.1 Kommunikation - Umfassende Übersicht

7 Stromversorgung
Für Ihre eigenen Zeichnungen und Notizen
132 Technisches Training FSE SIPLACE TX-Series 08/2018
8 Steuerung und Kommunikation
8.1 Kommunikation - Umfassende Übersicht
Technisches Training FSE SIPLACE TX-Series 08/2018 133
8 Steuerung und Kommunikation
8.1 Kommunikation - Umfassende Übersicht
8 Steuerung und Kommunikation
8.2 Maschinenkommunikation - Übersicht über das Bussystem
134 Technisches Training FSE SIPLACE TX-Series 08/2018
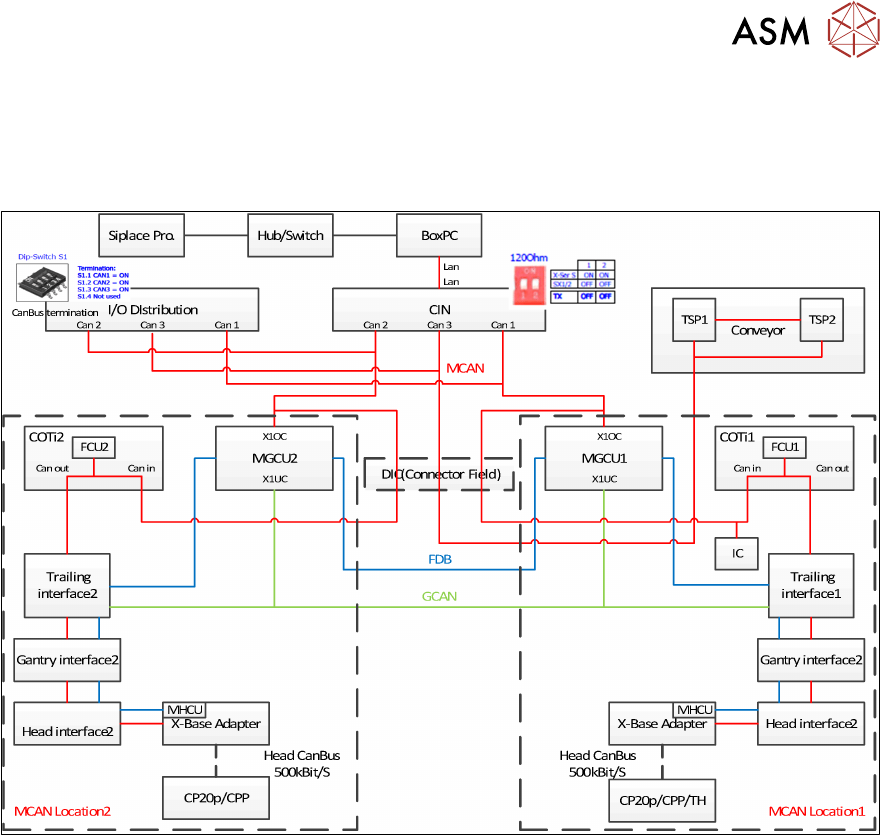
8.2 Maschinenkommunikation - Übersicht über das
Bussystem
TX-Maschinen verwenden drei verschiedene Bussysteme:
MCAN (Maschinen-CAN-Bus)
Der MCAN-Bus ist verantwortlich für die Kommunikation zwischen dem BoxPC und den
verschiedenen Subsystemen innerhalb der Maschine.
GCAN (Gantry CAN-Bus)
Der GCAN-Bus ist verantwortlich für die Kommunikation zwischen den Portalsteuereinheiten
(MGCUs) und den Kopfsteuereinheiten (MHCUs) (z.B. Kopf-CAN-Diagnose oder SIRIO-
Kommunikation).
FDB GCU (Fast Drive Bus GCU)
Die Fast Drive-Bus GCU ist eine direkte Verbindung zwischen den beiden GCUs, die für die
Synchronisierung der Portale (Anti-Crash) verantwortlich sind.
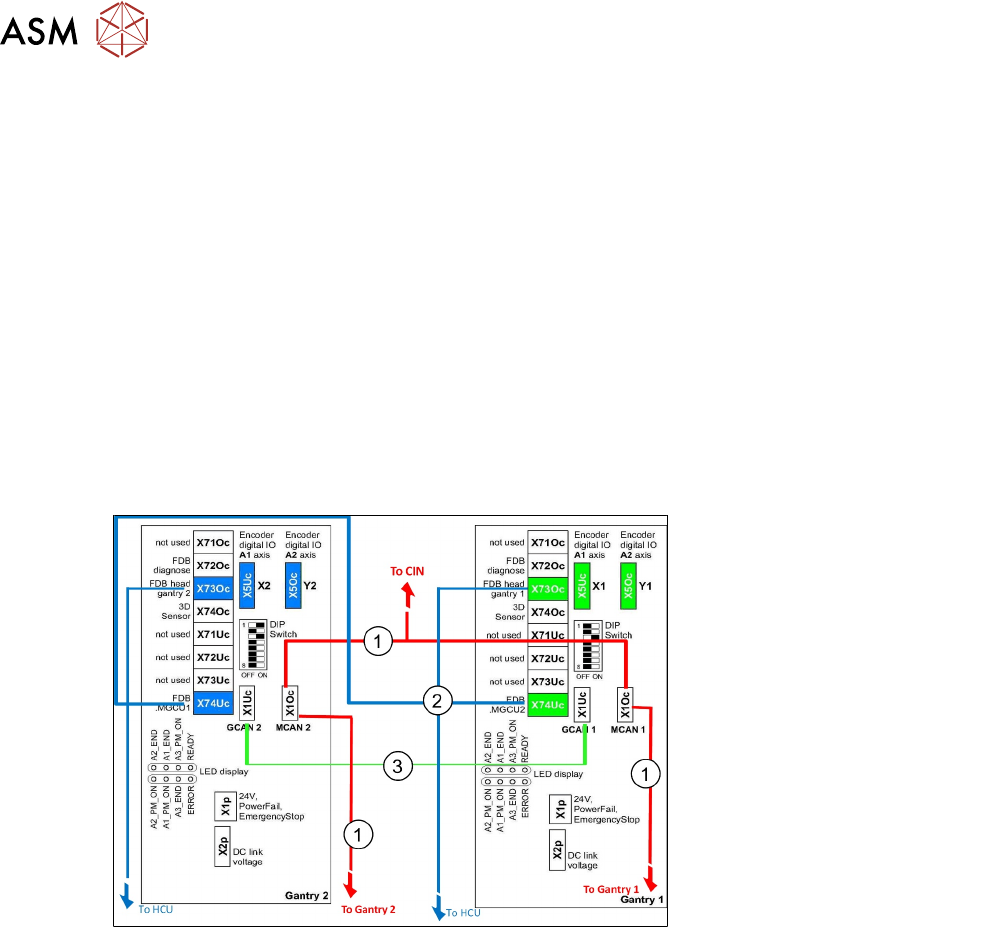
1. MCAN (Maschinen-CAN-
Bus)
2. Fast Drive Bus (FDB)
3. GCAN (Gantry CAN-Bus)
und zum Training auch -
Schnittstelle 1/2
MCAN (Maschinen-CAN-Bus)
TX-Maschinen arbeiten mit drei getrennten CAN-Busschleifen (CAN1/CAN2/CAN3).
Der CAN-Bus arbeitet mit einer Geschwindigkeit von 1MBit/s.
Die CAN-Schnittstelle (CAN Interface - CIN) (anstelle der CAN-Karte im Box-PC) dient als
Schnittstelle zu Box-PC / SIRIO.