00193933-03.pdf - 第130页
3 Tekniske data Driftsvejledning SIPLACE HF-serie 3.7 Collect&Place-hov ed Softwareversion SR.50x.xx Udgav e 01/2006 DK 130 DP-aksen drejer d en optisk centrere de kompon ent i den øn skede be styknin gsposition . Dr…

Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
129
3.7.4.1 Beskrivelse
Dette højtudviklede bestykningshoved består af to bestykningshoveder af samme type (tvillinge-
hoved), der er koblet ved siden af hinanden og som arbejder efter Pick&Place-princippet. Twin-
Head er velegnet til at forarbejde særligt krævende og store komponenter. To komponenter
hentes af bestykningshovedet, centreres optisk på vej hen til bestykningspositionen og drejes i
den nødvendige bestykningsposition. Herefter sættes de forsigtigt og positionsnøjagtigt fra på
printpladen ved hjælp af reguleret blæseluft. 3
Til TwinHead er der blevet udviklet nye pipetter (type 5xx). Med en adapter kan man også anvende
Pick&Place-hovedets pipetter af typen 4xx og Collect&Place hovedernes pipetter af typen 8xx og
9xx. 3
Kontrol- og selflearning-funktioner 3
Forskellige kontrol- og selflearning-funktioner øger TwinHead´s pålidelighed. 3
– Vakuumkontrol på pipetterne viser f.eks., om komponenten er blevet hentet eller afleveret
korrekt.
– Højtopløsende, intelligente visionsmoduler som f.eks. Finepitch og Flip-Chip visionsmoduler
– konstaterer også meget små afvigelser ved komponentpositionen, korrigerer disse og sikrer
dermed en korrekt bestykningsposition. Komponent-kameraerne er fastgjort stationært på
maskinens ramme.
– Også komponentens husform kontrolleres. Afviger de beregnede geometriske data fra de
programmerede data, bestykkes komponenten ikke.
– De fastlagte påsætningskræfter for komponenterne måles og overvåges af en kraftsensor.
– I tilfælde af trykluft- eller strømsvigt løftes den vertikale akse (Z-akse) i en sikker position for
at undgå et hovedcrash.
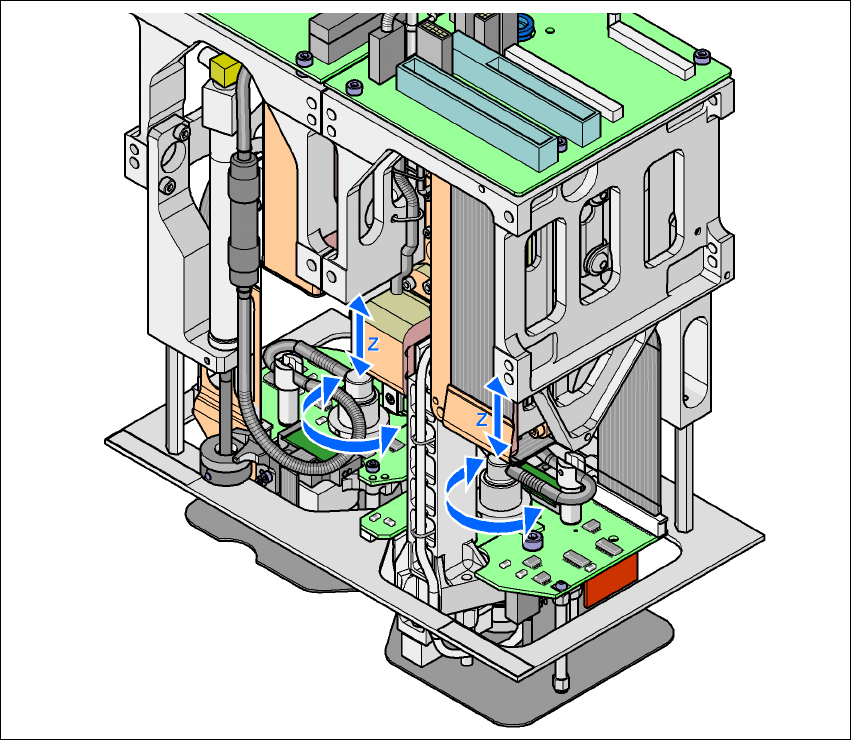
3.7.4.2 Funktionsbeskrivelse
TwinHead består af to Pick&Place-hoveder, der er koblet ved siden af hinanden, og hvor hvert ho-
ved styres separat. Hvert hoved har to akser, nemlig Z-aksen og DP-aksen (se Fig. 3.7 - 8
). 3
Z-aksens bevægelsesvej registreres af et højt opløsende, lineært inkrementalmålesystem. Z-ak-
sen gennemfører en vertikal bevægelse. En linearmotor løfter og sænker Z-aksen. Dermed hen-
tes komponenter ud af transportører hhv. trays og sænkes ned på printpladen. Z-aksen er en
såkaldt „intelligent“ akse. Den "husker" hentehøjden for transportører og trays og bestykningshøj-
den for hver komponent. På den måde kan bestykningsprocessen accelereres. Den programme-
rede påsætningskraft måles og overvåges af en kraftsensor. 3
3 Tekniske data Driftsvejledning SIPLACE HF-serie
3.7 Collect&Place-hoved Softwareversion SR.50x.xx Udgave 01/2006 DK
130
DP-aksen drejer den optisk centrerede komponent i den ønskede bestykningsposition. Drejeak-
sen drives af en skridtmotor. Motorakslen er udformet som pinolrør. I den øverste ende er inkre-
mentalskiven for vinkelvurderingen fastgjort, i den nederste ende findes henteanordningen for
pipetten. 3
Bevægelsesforløbene for rotations- og også translationsakserne styres af reguleringskredse.
Sensorer for position og hastighed overfører de faktiske værdier for aksebevægelse til akseakti-
veringen. Ved at sammenligne de indstillede og de faktiske værdier finder systemet frem til kraft-
og hastighedsparametrene for servoforstærkerne og således til den aksebevægelse, der skal ud-
føres. 3
Vakuumværdierne på pipetten kontrolleres elektronisk hele tiden under hele hente- og bestyk-
ningsprocessen for at holde bestykningsfejlraten så lav som mulig. 3
3
Fig. 3.7 - 10 Funktionsbeskrivelse
3
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
131
3.7.4.3 Tekniske data
3
3
3
*) Vær opmærksom på, at det bestykbare komponent-spektrum også påvirkes af pad-geometrierne, de kundespeci-
fikke standarder og komponent-emballagetolerancerne.
**) Hvis der anvendes standardpipetter
Optisk centrering med Komponent-kamera, stationær,
P&P (type 22) 50 x 40
Komponent-kamera, stationær,
P&P (type 20) 8 x 8
Komponent-spektrum *) 0603 til SO, PLCC, QFP, BGA,
special-komponent, Bare Die,
Flip-Chip
0201 til SO, PLCC, QFP, sokkel,
stik, BGA, special-komponent,
Bare Die, Flip-Chip, Shield
Komponent-specifikation
Max. højde
Min. benafstand
Min. ball-afstand
Min. ball-diameter
Min. mål
Max. mål
Max. vægt
25 mm (højere ved forespørgsel)
0,4 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
50 x 40 mm² (enkelt måling)
Ved drift med to pipetter
50 x 50 mm² eller
69 x 10 mm²
Ved drift med en pipette
85 x 85 mm² eller
125 x 10 mm²
max. 200 x 125 mm² (med ind-
skrænkninger)
100 g **)
25 mm (højere ved forespørgsel)
0,25 mm
0,14 mm
0,08 mm
0,6 x 0,3 mm²
8 x 8 mm² (enkelt måling)
100 g **)
Programmerbar påsætningskraft 1,0 N - 15 N 1,0 N - 15 N
Pipettetyper 5 xx (standard)
4 xx + adapter
8 xx + adapter
9 xx + adapter
5 xx (standard)
4 xx + adapter
8 xx + adapter
9 xx + adapter
Pipetteafstand for begge
Pick & Place hoveder
70,8 mm 70,8 mm
X-/Y-nøjagtighed ± 26 µm / 3 σ, ± 35 µm / 4 σ ± 22 µm / 3 σ, ± 30 µm / 4 σ
Vinkelnøjagtighed ± 0,05° / 3 σ, ± 0,07° / 4 σ ± 0,05° / 3 σ, ± 0,07° / 4 σ