00193933-03.pdf - 第144页
3 Tekniske data Driftsvejledning SIPLACE HF-serie 3.11 Visionssyst emer Softwareversion SR.50x .xx Udgave 01/2006 D K 144 3.1 1 V isionssy stemer Hvert 6- segment- og hvert 12-seg ment-Col lect&Plac e-hoved har s it …
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.10 Portaler
143
Y-aksen består hovedsageligt af følgende hovedkonstruktionsgrupper: 3
– Y-linear-motor (primærdel) (1)
– Permanentmagnet (sekundærdel på Y-linear-motor) (2)
– Lineært vejmålesystem (3)
– Føringssystem (4)
– Kabelsløjfe (5)
3
Y-aksen drives af en linearmotor. Drevets sekundærdel består af permanent-magneter og er mon-
teret på standeren. Primærdelen er skruet sammen med portalen. 3
3.10.6 Tekniske data for Y-aksen
3
Drev Direkte, lineærmotor
Max. hastighed 2,5 m/sec.
Bevægelsesvej 1430 mm
Vejmålesystem Lineær metalmålestok
Målestokslængde 1850 mm
Opløsning 1 µm
3 Tekniske data Driftsvejledning SIPLACE HF-serie
3.11 Visionssystemer Softwareversion SR.50x.xx Udgave 01/2006 DK
144
3.11 Visionssystemer
Hvert 6-segment- og hvert 12-segment-Collect&Place-hoved har sit eget komponent-visionsmo-
dul (se Fig. 3.7 - 3
på side 118 og Fig. 3.7 - 6 på side 123). Komponent-kameraet, stationær, P&P
(type 22) 50 x 40 til TwinHead er fastgjort på maskinens ramme. 3
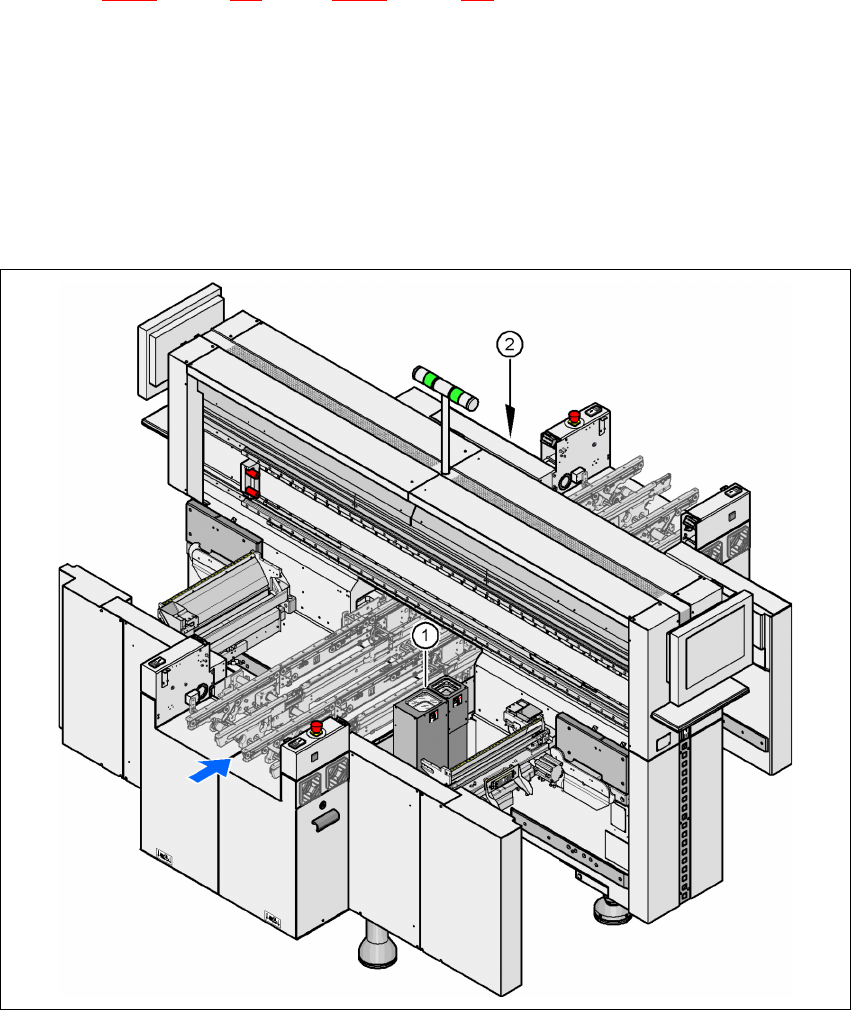
Monteringspositioner for komponent-kameraet, stationær, P&P (type 22) 50 x 40 3
3
3
Fig. 3.11 - 1 Monteringspositioner for komponent-kameraet, stationær, P&P (type 22) 50 x 40
(1) Monteringsposition for placeringssted 1 (HF-automat)
(2) Monteringsposition for placeringssted 3 (HF- og HF/3-automat)
TwinHead Komponent-kamera, stationær, P&P (type 22) 50 x 40
Bestykningsområde 1 Placeringssted 1 (HF-automat)
Bestykningsområde 2 Placeringssted 3 (HF- og HF/3-automat)
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.11 Visionssystemer
145
ADVARSEL
FARE FOR HOVEDCRASH 3
Skiftes bestykningshovedet fra et TwinHead til et Collect&Place-hoved, skal komponent-kame-
raet, stationær, P&P (type 22) 50 x 40 og komponent-kameraet, stationær, P&P (type 20) 8 x 8 til
TwinHead demonteres, ellers kolliderer Collect&Place-hovedet med kamerahusene.
Ved hjælp af komponent-visionsmodulet bestemmes 3
– komponentens nøjagtige position på pipetten og
– husformens geometri.
PCB-visionsmodulet beregner ved hjælp af pasmærker på printpladerne 3
– printpladens position,
– printpladens drejevinkel
– og printpladens deformation.
PCB-kameraerne er fastgjort på undersiden af portalerne. Ved hjælp af pasmærker på transpor-
tørerne beregner de den nøjagtige henteposition for komponenter, hvilket især er vigtigt for små
komponenter. 3