00193602-02.pdf - 第104页
3 拾取及置放 技術㈾料 SIPLACE HF 使用手冊 3.3 取置 頭 軟體版本 SR.504.xx 07/ 2003 ㆗文版 104 3.3.4 高精密 IC 取置用 SIPLACE 雙取置頭 (Twi nHead) 3 圖 3.3 - 8 高精密 IC 取置用雙取置頭 (T winHead) 3 ( 1 ) 拾取及置放模 組-雙取置頭 (Twin Head) 包含 ㈲ 2 個拾取及置 放模組 (2) DP 軸 (3) Z 軸驅 …
SIPLACE HF 使用手冊 3 拾取及置放技術㈾料
軟體版本 SR.504.xx 07/2003 ㆗文版 3.3 取置頭
103
3.3.3.3 技術㈾料
3
6 取置節 / 取置頭附標準元件攝
影機
6 取置節 / 取置頭附 DCA 攝影機
元件的範圍
0603 ㉃ 32 x 32 mm
2
0201㉃flip-chip、bare die
元件規格
最大高度
最小零件腳距
最小凸塊間距
最小錫球 / 凸塊 ∅
最小尺寸
最大尺寸
最大重量
8.5 mm
0.5 mm
0.56 mm
0.32 mm
1.6 mm x 0.8 mm
32 mm x 32 mm
5 g
8.5 mm
0.4 mm
0.2 mm
0.11 mm
0.6 mm x 0.3 mm
13 mm x 13 mm
5 g
可程式設定的取置力 2.4 N - 5.0 N 2.4 N - 5.0 N
吸嘴型式 8 xx, 9 xx 8 xx, 9 xx
最大取置速度 9,000 comp/h 9,000 comp/h
X/Y 精確度 ± 60 µ m/4 σ ± 55 µ m/4 σ
角度精確度 ± 0.3°/4 σ ± 0.3°/4 σ
3 拾取及置放技術㈾料 SIPLACE HF 使用手冊
3.3 取置頭 軟體版本 SR.504.xx 07/2003 ㆗文版
104
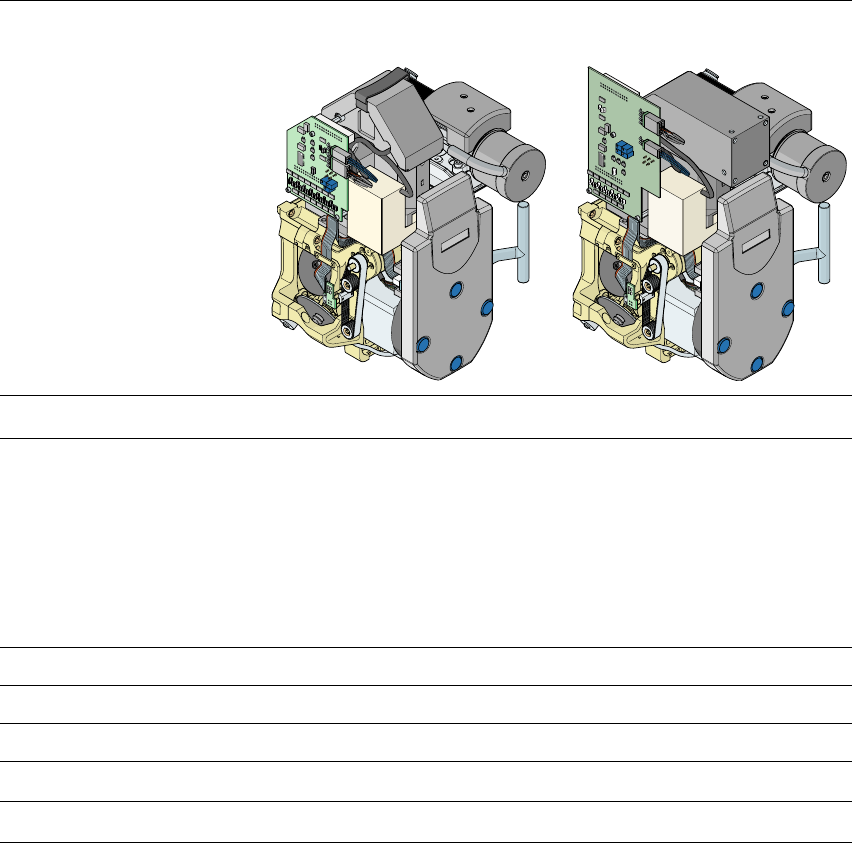
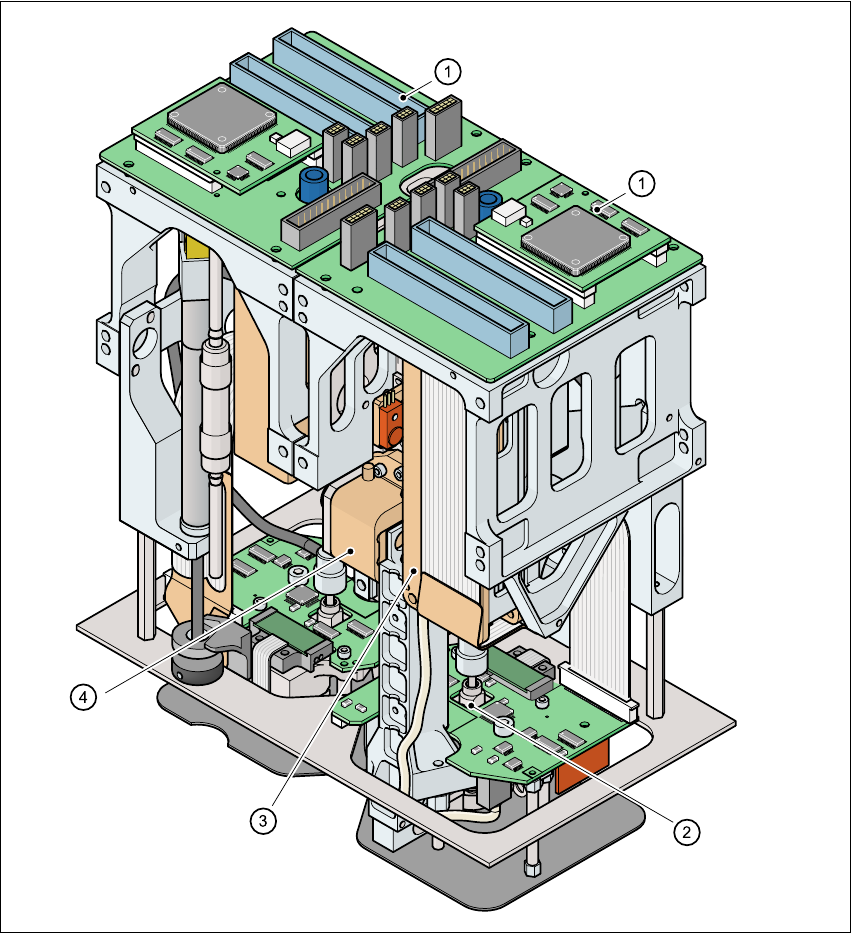
3.3.4 高精密 IC 取置用 SIPLACE 雙取置頭 (TwinHead)
3
圖 3.3 - 8 高精密 IC 取置用雙取置頭 (TwinHead)
3
(1) 拾取及置放模組-雙取置頭 (TwinHead) 包含㈲ 2 個拾取及置放模組
(2) DP 軸
(3) Z 軸驅動裝置
(4) Z 軸的步進距離測量系統
SIPLACE HF 使用手冊 3 拾取及置放技術㈾料
軟體版本 SR.504.xx 07/2003 ㆗文版 3.3 取置頭
105
3.3.4.1說明
這個精密的取置頭由兩個相同型式的取置頭連結在㆒起 ( 雙取置頭 ) 所構成。這兩個取置頭都採用
拾取及置放的原理作用。雙取置頭㊜合用來處理㈵別困難的或者大型的元件。取置頭可以拾取兩個
元件,以光㈻方式定位在前進到取置位置的位置㆖,並轉動到所需的取置角度。元件接著會以精密
控制的吹氣方式輕盈而精確的放置到 PCB ㆖。
我們已經針對雙取置頭 (TwinHead) 開發㈲新的吸嘴 (type 5xx)。它也可以裝配㆒個轉接頭,並使用
拾取及置放頭的 type 4 吸嘴及收取及置放頭的 type 8xx 與 9xx 吸嘴。
檢查及㉂我㈻習功能 3
33
3
透過各種檢查及㉂我㈻習功能,雙取置頭 (TwinHead) 的可靠性可以進㆒步提昇。
- 例如,吸嘴的真空檢查,可以顯示元件是否正確的拾取及放置。
- 高解析度、智慧檢視模組 ( 例如細間距及倒裝晶片檢視模組 ) 會辨識並修正與想要的元件位置之
間的細微誤差,據此保證正確的取置位置。元件攝影機永久固定在機架㆖。
- 它也會檢查元件的封裝型式,如果元件據此所測定的幾何㈾料與預設的㈾料不同,則不會進行
取置。
- ㆒個力道感知器會測量並㈼控指定的元件取置力。
- 如果壓縮空氣或動力失效,垂直軸 (Z 軸 ) 會升高到安全位置以避免取置頭發生撞擊。
3.3.4.2 功能的說明
雙取置頭 (TwinHead) 包括㈲兩個拾取及置放頭,兩者彼此連結在㆒起,但分別進行控制。每個取
置頭㈲兩個軸- Z 軸及 DP 軸 ( 參閱圖 3.3 - 7)。
Z 軸的移動路徑會透過㆒個高解析度的線性步進測量系統進行偵測。Z 軸可進行垂直移動。㆒個線
性馬達負責升高及降低 Z 軸,而元件則從輸送帶或料盤㆖拾取並放㆘到 PCB ㆖。Z 軸是㆒個 " 智慧
軸 "。它會 " 記住 " 輸送帶及料盤的拾取高度及每個元件的置放高度。這可以加速取置程序。設定
的取置力會由力道感知器進行測量及㈼控。