xp141-241-341-5.0E.pdf - 第132页
FK-9F98- 29 XP Series training Text for Service Engineers Edition 5.0 XP241 – Chapter 5 Peripheral Adjustments Page 7 of 19 Fuji Machine Mfg. Co., Ltd. Okazaki. SMT Equipment Quality Assurance Dept . 5 – 7 CS Section Not…
FK-9F98-29 XP Series training Text for Service Engineers
Edition 5.0 XP241 – Chapter 5 Peripheral Adjustments Page 6 of 19
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
5 – 6 CS Section
6. Select [Manual Operation] – [Tray Operation] - [Tray Exchange Pos.] – [START].
7. Mount a tray at tray position 01, and set the T axis to the T_Tray Org position.
Warning: ensure the shuttle and the tray do not collide when the tray unit is at its lower
limit.
8. Select [Manual Operation] – [Tray Operation] – [Advance Shuttle] to advance the shuttle.
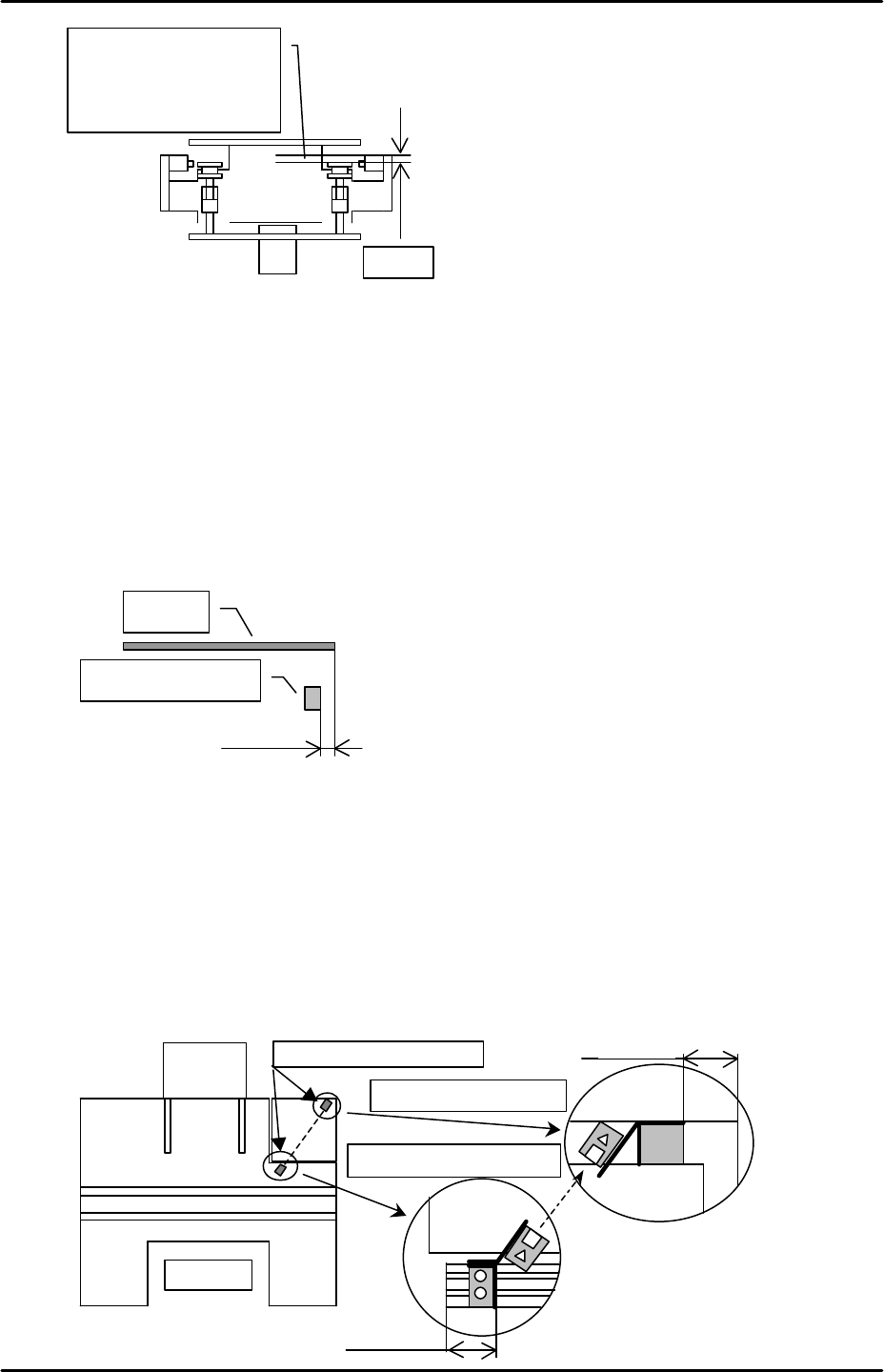
9. Adjust the tray advance limit sensor so that it is 5 mm from the front of the tray.
Ensure that the I/O X039 P.PosTrayDetect turns OFF when the tray is advanced.
Note: Set the arrival sensor amplifier to its maximum.
10. Ensure the conveyance of the trays works properly at all positions from 01 to 91.
Adjusting the tray eject check sensor
1. Select the I/O Input “X02A TrayPickUpChk”, and, adjust the sensor positions so that they
can detect ejected trays. The movable side sensor bracket can be slid along an
aluminium rail. The bracket should be positioned 35mm from the end of the rail. Please
see the diagram below:
Adjust so that the clamper
is positioned 0.5mm inside
the roller.
0.5mm
5mm
Arrival check sensor
Tray
M/C front
MTU
Tray eject check sensor
35mm
Movable side sensor BKT
Fixed side sensor BKT
30.5mm
FK-9F98-29 XP Series training Text for Service Engineers
Edition 5.0 XP241 – Chapter 5 Peripheral Adjustments Page 7 of 19
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
5 – 7 CS Section
Note: the following proper data settings refer to software version 1.12e and later. The proper
data item referred to is “Tray Eject Check” in machine operation. The default setting for new
machines is 2.
Proper data setting Status Sensor Location
0 Tray eject check is inactive. Either location.
1 Tray eject check is active. At the rear of the nozzle change station.
2 Tray eject check is active. At the tray eject area.
5.2 Adjusting the MFU
Measuring equipment: Lever type dial gauge (0.01mm).
Feeder flatness and parallelism measurements
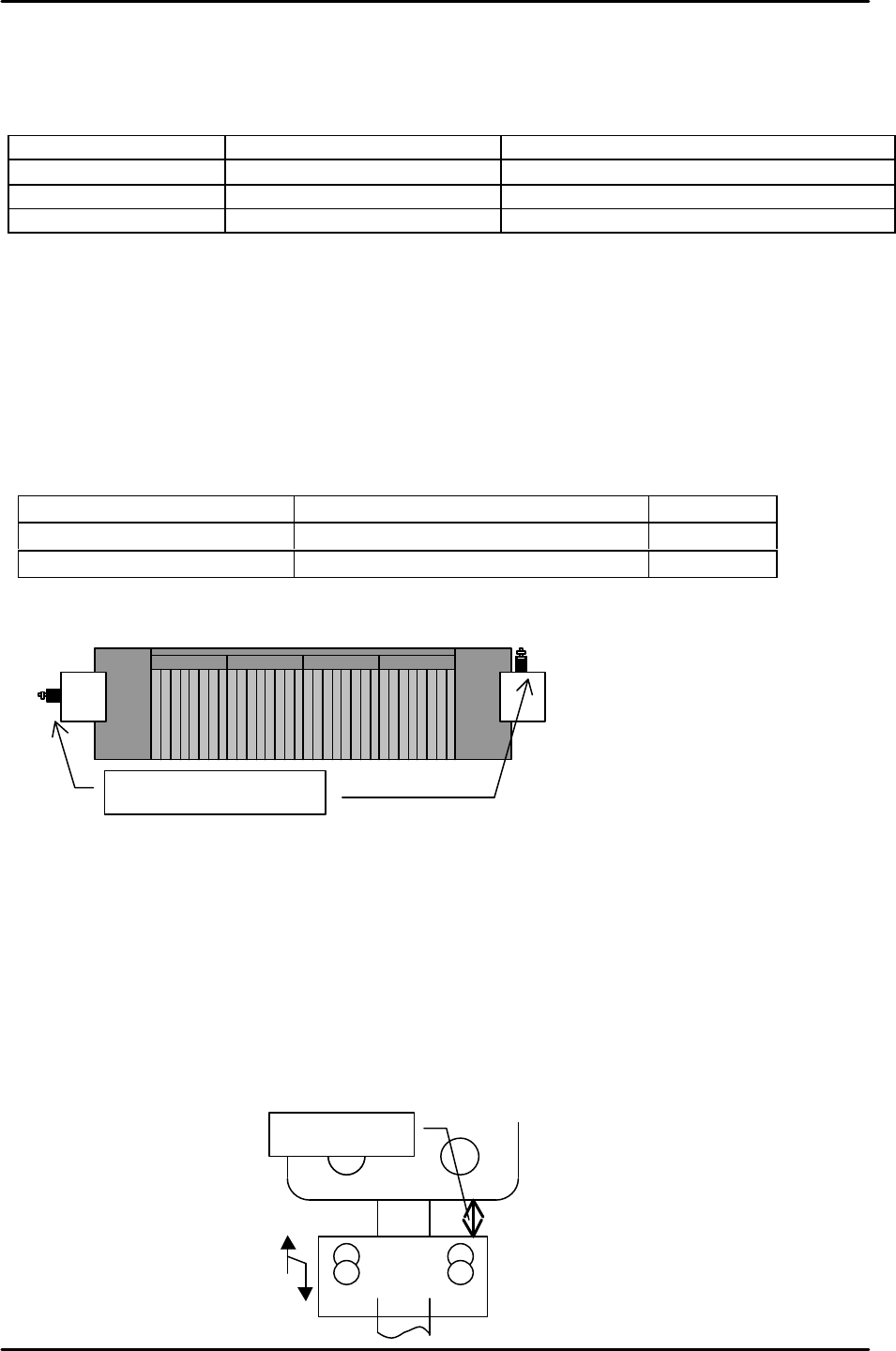
1. Adjust the MFU air valve speed controllers as follows:
Speed controller location Number of turns from fully closed Function
Upper speed controllers 2 turns from fully closed Unclamp
Lower speed controllers 1.5 turns from fully closed Clamp
Note: ensure that there is no jolting when clamping and unclamping the MFU.
2. Clamp the MFU to the machine.
Warning: the MFU device table is very heavy. Please take extreme care to prevent your
finger/hand getting caught when carrying out height or other adjustments on the MFU.
3. Adjust the MFU adjustment stopper, so that when the MFU is clamped, the gap between
the stopper and the MFU device table underside is approximately 20mm. Please see the
diagram below:
Approx. 20mm
D0 D40MFU
MFU Air valves
FK-9F98-29 XP Series training Text for Service Engineers
Edition 5.0 XP241 – Chapter 5 Peripheral Adjustments Page 8 of 19
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
5 – 8 CS Section
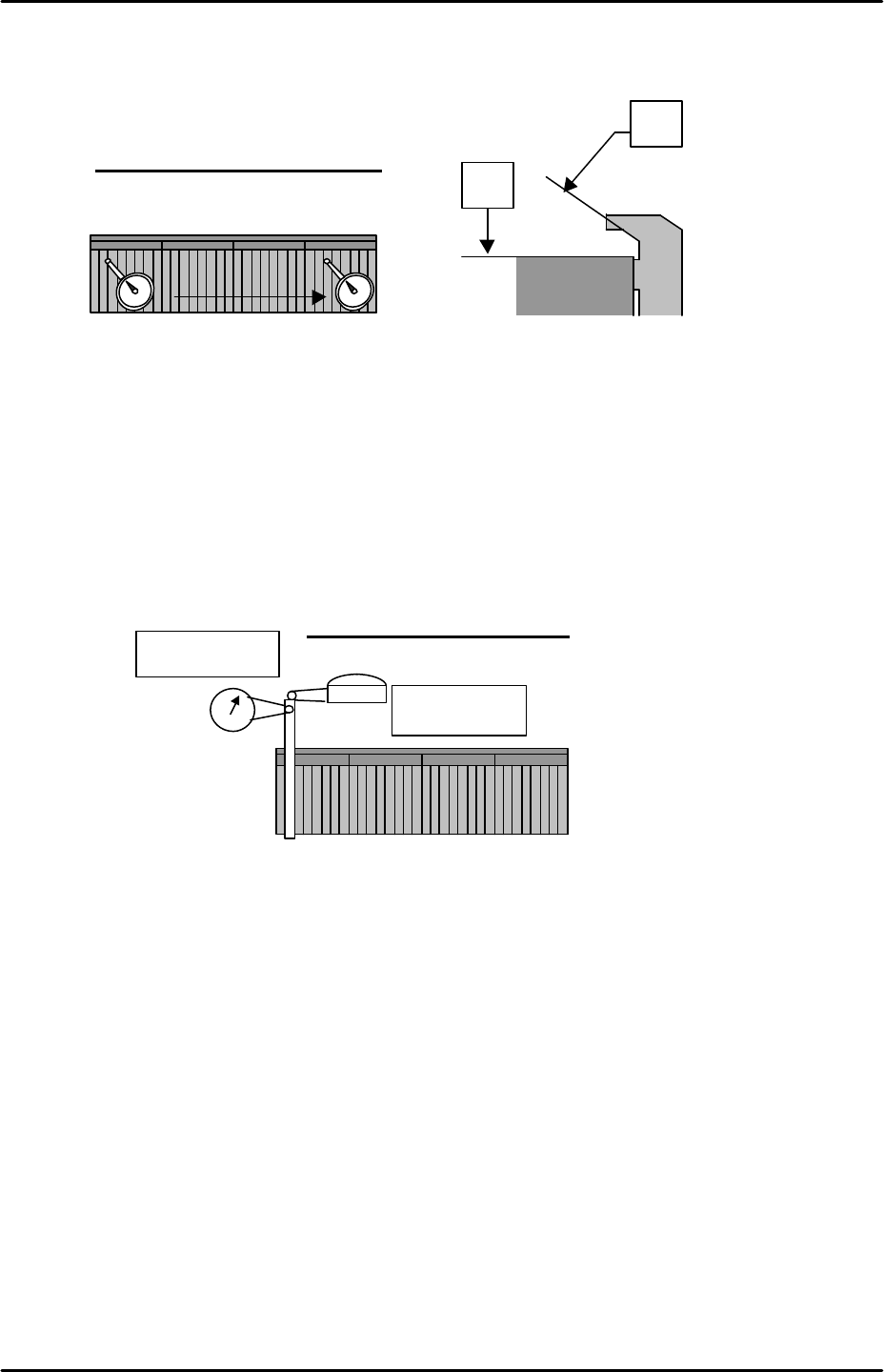
4. Use a dial gage to measure the device surface A and B. Please refer to the diagram
below:
5. Measure any additional MFUs in the same manner.
6. After measuring all of the MFUs, check the static accuracy of the MFUs at the clamping
position.
7. Choose one device as the reference MFU, and clamp the MFU to side 1.
8. Mount the device jig in slot No.2. Use an extension bar to attach the dial gage to the
placement head. Put the tip of the dial gage to the device jig in the Z and Y directions.
Please refer to the illustration:
9. Set the dial to 0. Jog the head in the X-direction so that the dial gage tip leaves the jig.
Record the present Y-axis servo count, and then unclamp the MFU.
10. Clamp the other MFU.
11. After clamping the MFU, mount the device jig in slot No.2 and turn the servo ON. Jog the
X-axis and check the difference between the position of the two MFUs in the Y and Z
directions.
12. Repeat the procedure for any other MFUs.
X direction static accuracy check
1. Clamp the reference MFU used in previous steps to side 1.
2. Mount the device jig to device No.2 and set the dial gauge tip to the X-direction.
A
B
0
D1
D40
Tolerance: 0.05 mm / 800mm
Z-direction
Y-direction
Tolerance: within 0.050mm