xp141-241-341-5.0E.pdf - 第163页
FK-9F98- 29 XP Series Training Text for Service Engineers Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 17 of 20 Fuji Machine Mfg. Co., Ltd. Okazaki. SMT Equipment Quality Assurance Dept . 6 – 17 CS Section…
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 16 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 16 CS Section
8. Select [Maintenance C] – [Proper data editor] – [Machine Origin] –
[X_stage2Org/Y_stage2Org] – [Direct servo input] to save the current X and Y axes
positions in proper data.
9. Remove the tray pick up position jig and descend the Z-axis until the nozzle jig
contacts the surface of tray 01.
10. Select [Maintenance C] – [Proper data editor] – [Machine Origin] –
[Z_stage2surface] – [Direct servo input] to save the current Z-axis position in proper
data.
11. After completing this adjustment select [Maintenance C] – [Proper data editor] –
[Operation] – and confirm that the proper data item “TrayDetectMotion” is set to 2.
6.13 Measuring the MFU pick up position
1. Equipment: Nozzle jig (Z9531DEPJ0070). MFU pick up position measurement jig
(Z5531ADPEPJ9010).
2. Select [Manual Operation] – [MFU Clamp] to clamp the MFU to the machine.
3. Mount the MFU pick up position measurement jig at device position 25.
4. Select [Maintenance A] – [Jog] – [Fiducial] and display the cross hairs on the
screen.
5. Inch the X and Y axes until the fiducial camera cross hairs are centered on the XY
pick up position jig mark.
6. Select [Maintenance C] – [Proper data editor] – [Machine Origin] –
[X_Stage1Org/Y_Stage1Org] – [Direct servo input] to save the current X and Y
axes positions in proper data.
7. Select [Maintenance A] – [I/O Check] – [Y021 NozzleUnhold] – [OFF] and attach
the nozzle jig to the placing head.
8. Manually bring the nozzle jig above the surface of the MFU pick up position
measurement jig surface and descend the Z axis until the nozzle jig contacts the
surface.
9. Select [Maintenance C] – [Proper data editor] – [Machine Origin] –
[Z_Stage1surface] – [Direct servo input] to save the current Z-axis position in
proper data.
10. In situations where the MFU pick up position measurement jig is unavailable, a
normal feeder may be used. In this case align the fiducial camera center on the
Z5531ADPEPJ9010
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 17 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 17 CS Section
component in the parts pick up cavity and save the X and Y positions in proper data
by following the procedure above. Set the Z_Stage1surface proper data where a
0.7 diameter nozzle first contacts the component surface.
6.14 Measuring the glass gage position
1. Equipment: Nozzle jig (Z9531DEPJ0070). Glass gage (BVDZ-0140).
2. Select [Maintenance A] – [Jog] – [Fiducial] – and display the cross hairs on the
screen.
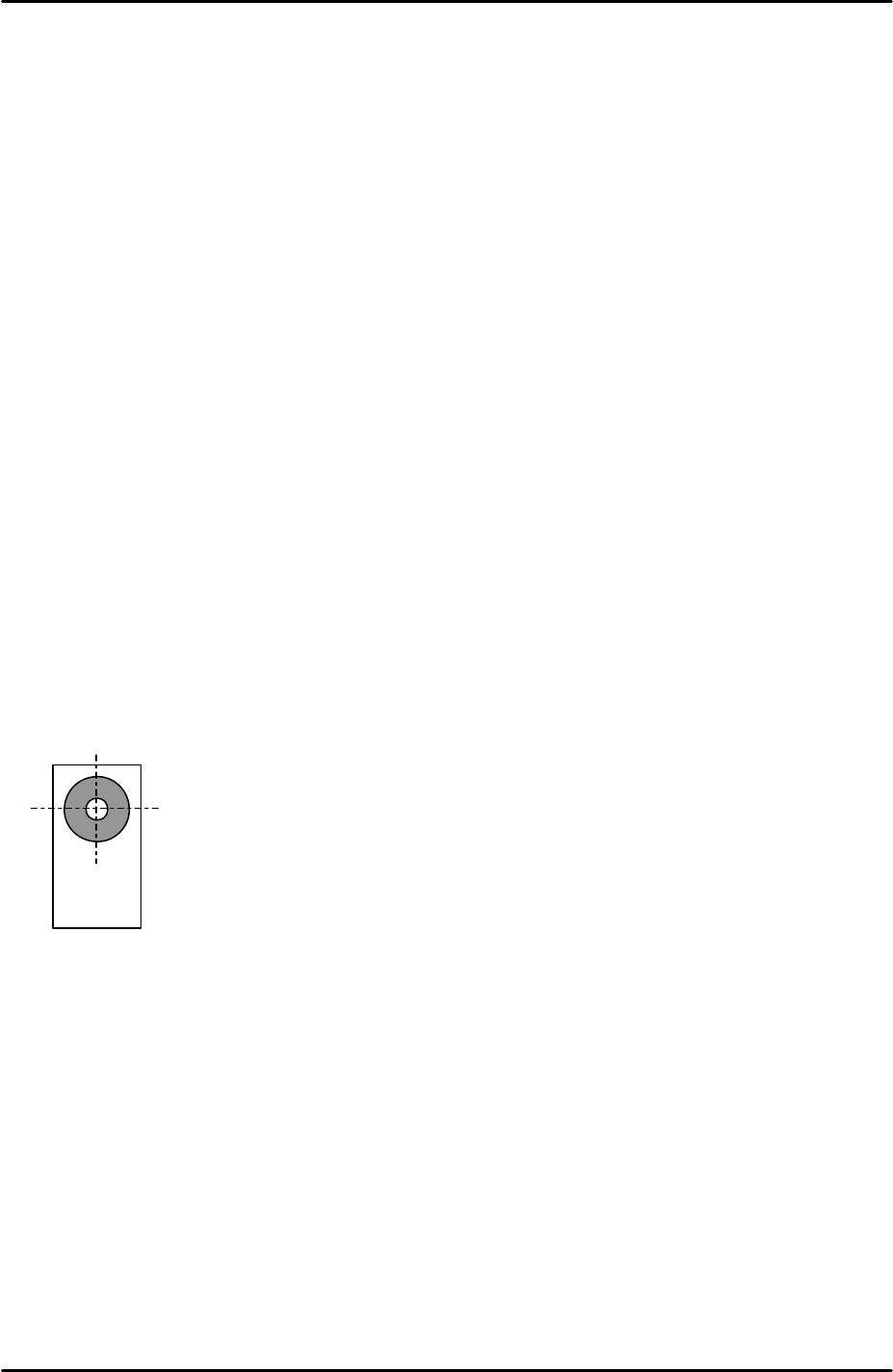
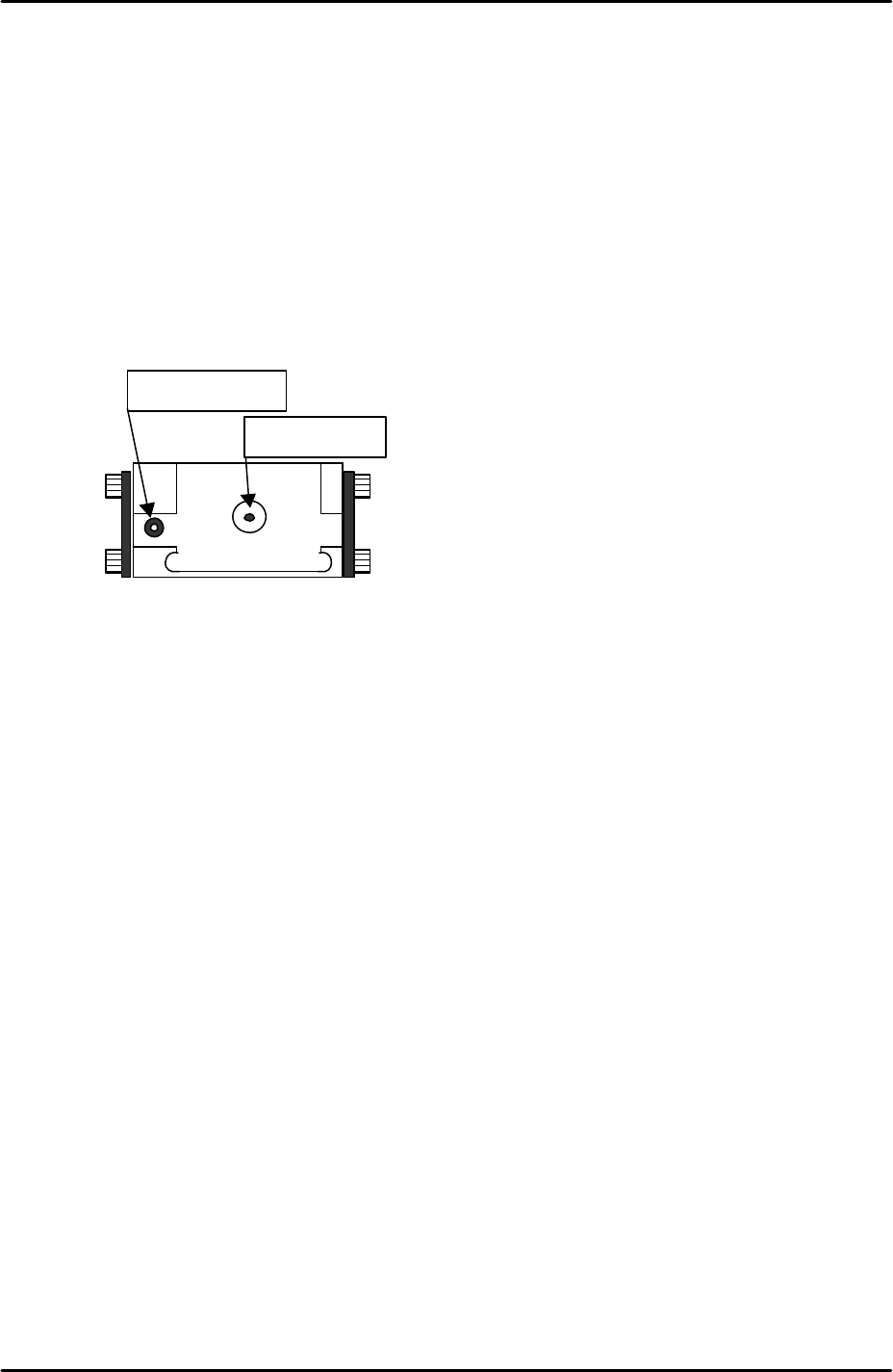
3. Inch the X and Y axes until the fiducial camera is centered on the glass gage
station vacuum hole.
4. Select [Maintenance C] – [Proper data editor] – [Jig Position] – [X_Jig Pick Pos1/
Y_Jig Pick Pos] – [Direct servo input] to save the current X and Y axes positions in
proper data.
5. Select [Maintenance A] – [I/O Check] – [Y021 NozzleUnhold] – [OFF] and attach
the nozzle jig to the placing head.
6. Set the glass gage in the glass gage station and inch the nozzle jig above the glass
gage.
7. Press the emergency stop button to cut the 200-volt power supply to the servos and
then manually lower the Z-axis until the nozzle jig contacts the surface of the glass
gage.
8. Select [Maintenance C] – [Proper data editor] – [Jig position] – [Z_Jig Pick Pos] –
[Direct servo input] to save the current Z-axis position in proper data.
Fiducial Mark
Vacuum hole
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 18 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 18 CS Section
6.15 Measuring the matrix data
1. Equipment: glass gage for matrix measurement (A5704DEAJ14013).
2. Note that the matrix data measurement should be carried out when the machine is
cold, otherwise the results will not be reliable. Fuji recommends that the machine is
not used for at least two hours prior to the measurement.
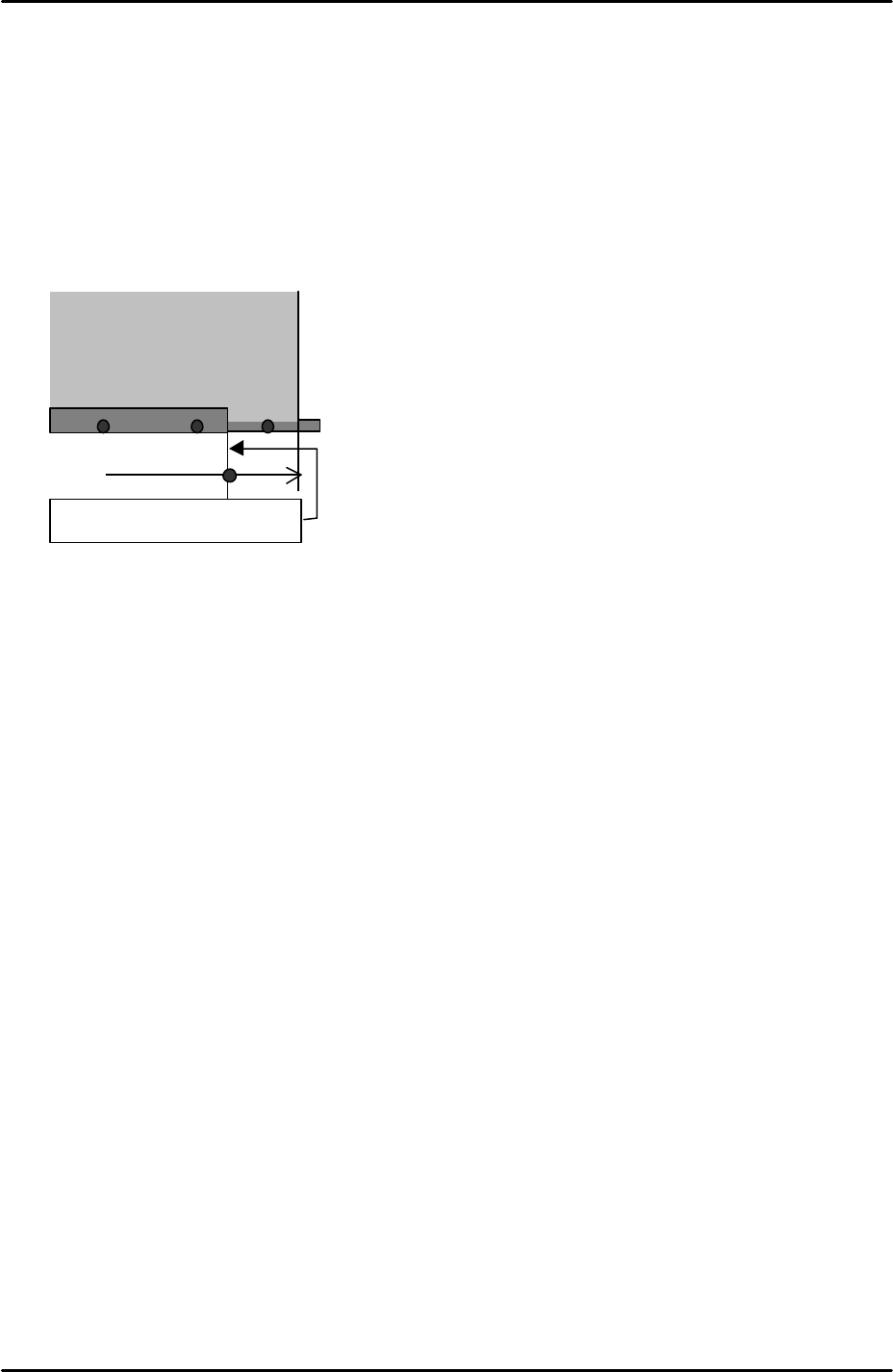
3. Clamp the matrix measurement glass gage approximately 70mm from the main
conveyor right end.
4. Because the glass gage is 5mm thick the main lifter upper limit sensor will not come
ON when the gage is clamped. As a result it is necessary to interrupt the upper
limit sensor with a piece of paper tape.
5. Select [Maintenance A] – [Jog] – [Fiducial] – and display the cross hairs on the
screen.
6. Center the fiducial camera on the last dot in the bottom left hand corner of the glass
gage and record the Y-axis counter value.
7. Move the fiducial camera until it is centered on the last dot in the bottom right hand
corner of the glass gage. Compare the current Y-axis counter value with that
recorded in step 6. The difference in value should be within 0.5mm. This ensures
that the X-axis and the glass gage are parallel.
8. With the fiducial camera still centered on the last dot in the bottom right hand corner
of the glass gage select [Maintenance C] – [Matrix data measurement] – and set
the acceleration rate to 1.0 before selecting [Start].
9. The measurement will take approximately 1 hour to complete. Matrix data
measurement is designed to compensate for minute discrepancies in the
straightness of the X and Y- axis ball screws. The measurement is performed in
the factory prior to machine shipment and is not normally performed again.
6.16 Adjusting the conveyor automatic width changer
1. Equipment: lever type dial gage (0.01mm). Width defining mark bracket height
adjustment jig (A9531DEPJ1250).
2. Set the jig adjacent to the width defining mark bracket on the adjustable rail.
Glass gauge for matrix data
(A5704DEAJ1013)
Approx. 70mm
Main conveyor right end