xp141-241-341-5.0E.pdf - 第217页
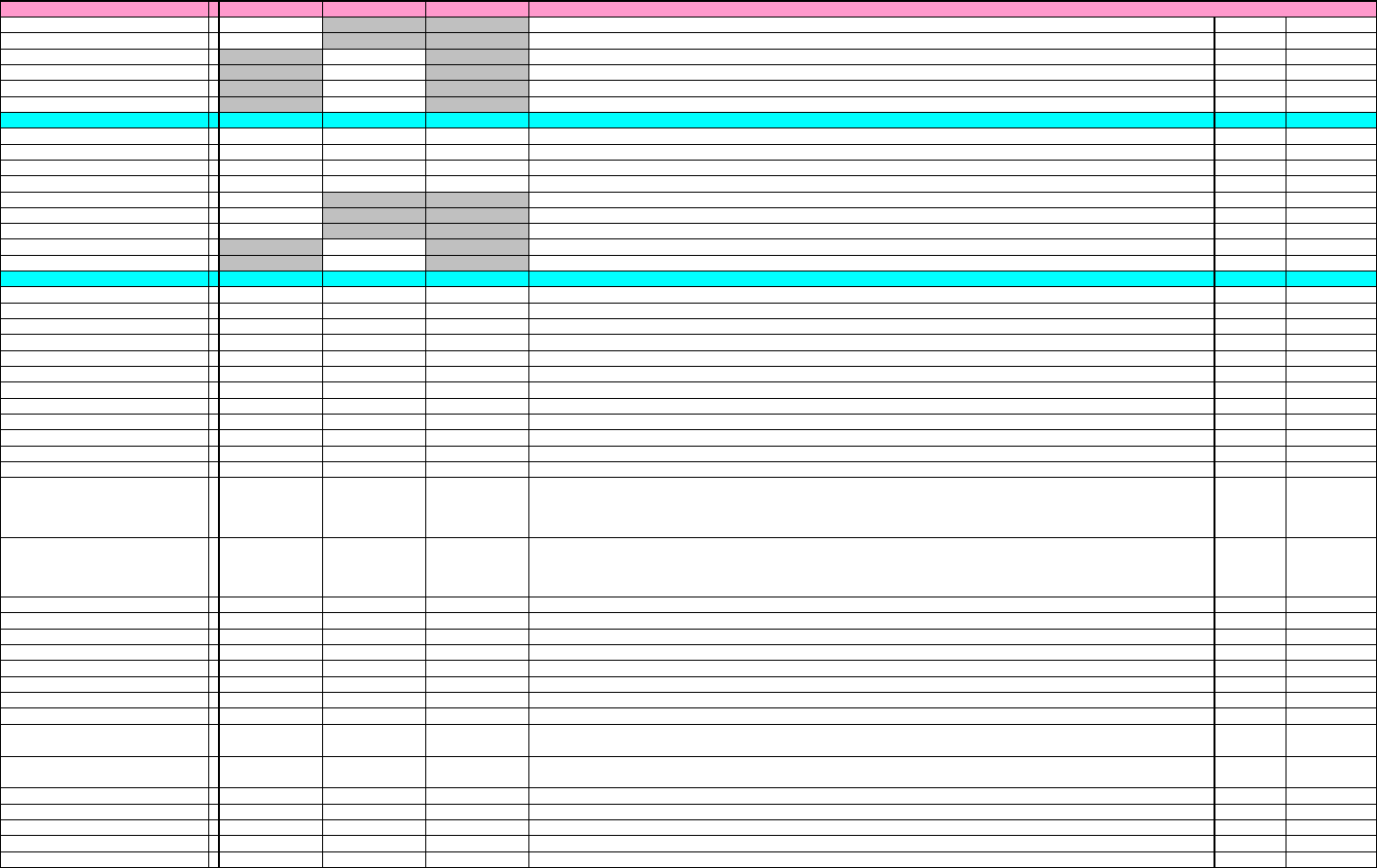
XP Proper Data List V1.40 14/11/2002 Item XP141 XP241 XP341 Description Reboot z_CurveNo = 1 1 1 Z-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc) User cannot edit q_MaxV = 210000000 210000000 210000000 ?-axis …
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
G_PlusLimit
=
4.5
0
0
G-axis servo stroke (mm)
Calibrated data l
G_MinusLimit
=
-10.8
0
0
G-axis servo stroke (mm)
Calibrated data l
T_PlusLimit
=
0
520
0
T-axis servo stroke (mm)
Calibrated data l
T_MinusLimit
=
0
0
0
T-axis servo stroke (mm)
Calibrated data l
U_PlusLimit
=
0
532
0
U-axis servo stroke (mm)
Calibrated data l
U_MinusLimit
=
0
0
0
U-axis servo stroke (mm)
Calibrated data l
_______JOG_BASE_SPEED______
=
0
0
0
X_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
Y_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
Z_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
Q_jogBaseSpeed
=
50000
50000
50000
Base inching speed (logical pulse/sec)
User cannot edit
R_jogBaseSpeed
=
50000
50000
50000
Base inching speed (logical pulse/sec)
User cannot edit
F_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
G_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
T_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
U_jogBaseSpeed
=
10000
10000
10000
Base inching speed (logical pulse/sec)
User cannot edit
______SERVO_PARAMETER______
=
0
0
0
x_MaxV
=
16000000
16000000
16000000
X-axis Max. speed
User cannot edit
x_MaxA
=
240000000
230000000
230000000
X-axis Max acceleration
User cannot edit
x_ptpGain
=
100
100
100
X-axis Gain value during traveling
User cannot edit
x_stGain
=
500
250
250
X-axis Gain value during positioning
User cannot edit
x_afterGain
=
60
100
60
X-axis Gain value during stopping
User cannot edit
x_P_CON_Start
=
6
6
6
X-axis P_CON start time (ms)
User cannot edit
x_integralGain
=
60
100
100
X-axis Integral gain
User cannot edit
x_AxisValid
=
1
1
1
X-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
x_spare2
=
1
1
1
X-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
x_CurveNo
=
1
1
1
X-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
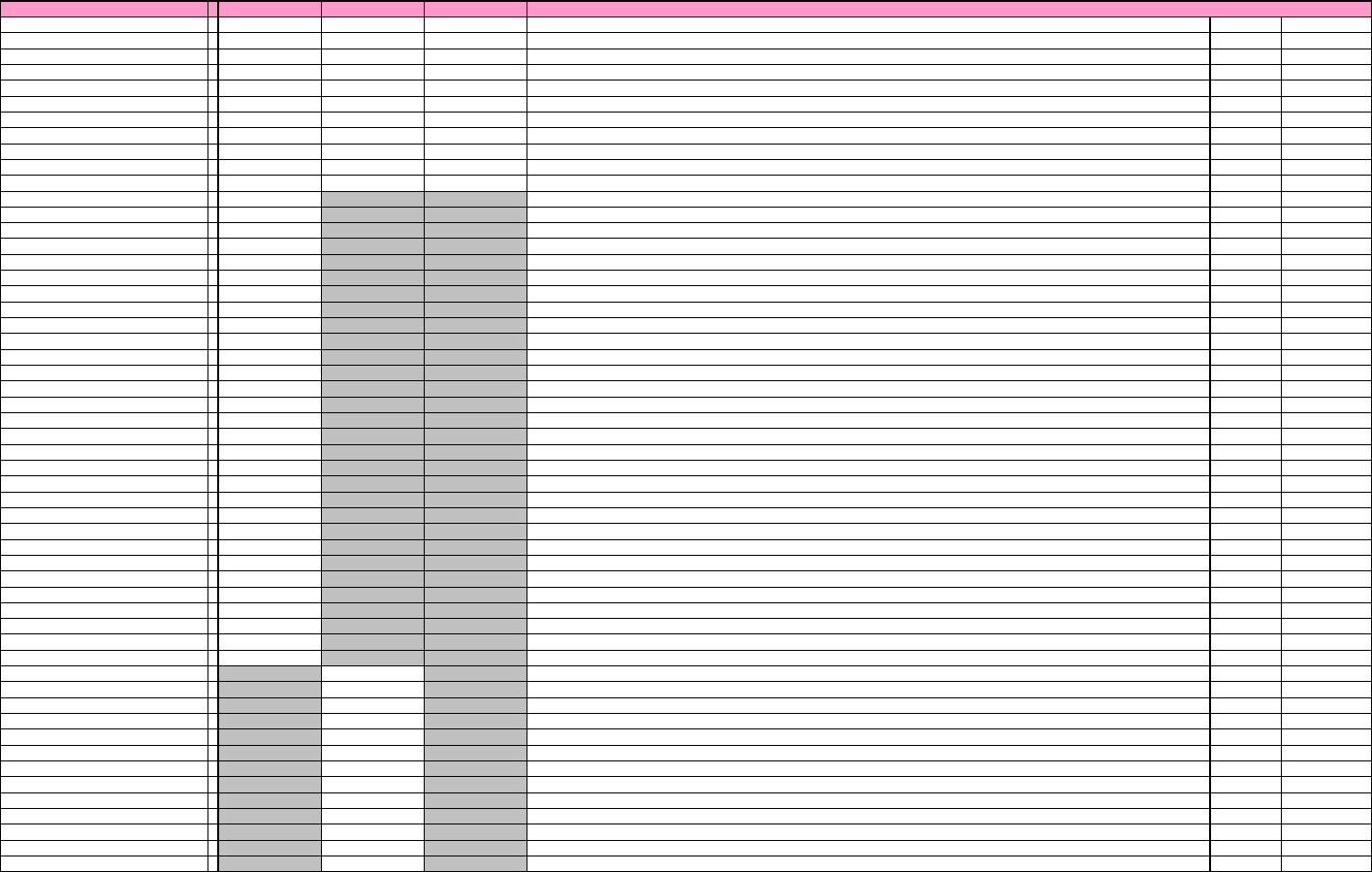
y_MaxV
=
25000000
25000000
25000000
Y-axis Max. speed
User cannot edit
y_MaxA
=
372000000
448000000
448000000
Y-axis Max acceleration
User cannot edit
y_ptpGain =
Steel pulley
110
Aluminium pulley
100
150 150 Y-axis Gain value during traveling
User cannot edit
y_stGain =
Iron pulley
650
Aluminum pulley
1000
500 500 Y-axis Gain value during positioning
User cannot edit
y_afterGain
=
60
120
150
Y-axis Gain value during stopping
User cannot edit
y_P_CON_Start
=
6
6
6
Y-axis P_CON start time (ms).
User cannot edit
y_integralGain
=
60
120
150
Y-axis Integral gain
User cannot edit
y_AxisValid
=
1
1
1
Y-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
y_spare2
=
1
1
1
Y-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
y_CurveNo
=
1
1
1
Y-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
z_MaxV
=
7040000
10000000
10000000
Z-axis Max. speed
User cannot edit
z_MaxA
=
1500000000
830000000
830000000
Z-axis Max acceleration
User cannot edit
z_ptpGain
=
T1.16b ~ =160
~ T1.13 =200
200 200 Z-axis Gain value during traveling
User cannot edit
z_stGain
=
T1.16b ~ =3000
~ T1.13 =4000
1000 1000 Z-axis Gain value during positioning
User cannot edit
z_afterGain
=
150
150
150
Z-axis Gain value during stopping
User cannot edit
z_P_CON_Start
=
6
6
6
Z-axis P_CON start time (ms)
User cannot edit
z_integralGain
=
150
150
150
Z-axis Integral gain
User cannot edit
z_AxisValid
=
1
1
1
Z-axis 1: Valid this axis 0: Ignore this axis
User cannot edit
z_spare2
=
1
1
1
Z-axis 1:Valid this axis 0: Ignore this axis
User cannot edit
4/10
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
z_CurveNo
=
1
1
1
Z-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
q_MaxV
=
210000000
210000000
210000000
?-axis Max. speed
User cannot edit
q_MaxA
=
13000000000
10000000000
10000000000
?-axis Max acceleration
User cannot edit
q_ptpGain
=
200
300
300
?-axis Gain value during traveling
User cannot edit
q_stGain
=
500
2000
2000
?-axis Gain value during positioning
User cannot edit
q_afterGain
=
100
200
200
?-axis Gain value during stopping
User cannot edit
q_P_CON_Start
=
6
6
6
?-axis P_CON start time (ms).
User cannot edit
q_integralGain
=
100
200
200
?-axis Integral gain
User cannot edit
q_AxisValid
=
1
1
1
?-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
q_spare2
=
1
1
1
?-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
q_CurveNo
=
1
1
1
?-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
r_MaxV
=
105000000
0
0
R-axis Max. speed
User cannot edit
r_MaxA
=
12000000000
0
0
R-axis Max acceleration
User cannot edit
r_ptpGain
=
120
0
0
R-axis Gain value during traveling
User cannot edit
r_stGain
=
1000
0
0
R-axis Gain value during positioning
User cannot edit
r_afterGain
=
100
0
0
R-axis Gain value during stopping
User cannot edit
r_P_CON_Start
=
6
0
0
R-axis P_CON start time (ms).
User cannot edit
r_integralGain
=
60
0
0
R-axis Integral gain
User cannot edit
r_AxisValid
=
1
0
0
R-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
r_spare2
=
1
0
0
R-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
r_CurveNo
=
3
0
0
R-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
f_MaxV
=
8500000
0
0
F-axis Max. speed
User cannot edit
f_MaxA
=
1900000000
0
0
F-axis Max acceleration
User cannot edit
f_ptpGain
=
200
0
0
F-axis Gain value during traveling
User cannot edit
f_stGain
=
2000
0
0
F-axis Gain value during positioning
User cannot edit
f_afterGain
=
150
0
0
F-axis Gain value during stopping
User cannot edit
f_P_CON_Start
=
6
0
0
F-axis P_CON start time (ms)
User cannot edit
f_integralGain
=
100
0
0
F-axis Integral gain
User cannot edit
f_AxisValid
=
1
0
0
F-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
f_spare2
=
1
0
0
F-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
f_CurveNo
=
1
0
0
F-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
g_MaxV
=
8500000
0
0
G-axis Max. speed
User cannot edit
g_MaxA
=
1900000000
0
0
G-axis Max acceleration
User cannot edit
g_ptpGain
=
200
0
0
G-axis Gain value during traveling
User cannot edit
g_stGain
=
2000
0
0
G-axis Gain value during positioning
User cannot edit
g_afterGain
=
150
0
0
G-axis Gain value during stopping
User cannot edit
g_P_CON_Start
=
6
0
0
G-axis P_CON start time (ms)
User cannot edit
g_integralGain
=
100
0
0
G-axis Integral gain
User cannot edit
g_AxisValid
=
1
0
0
G-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
g_spare2
=
1
0
0
G-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
g_CurveNo
=
1
0
0
G-axis Cam curve No. (1:sinusoidal transformation, 3:NC2etc)
User cannot edit
t_MaxV
=
0
5000000
0
T-axis Max. speed
User cannot edit
t_MaxA
=
0
100000000
0
T-axis Max acceleration
User cannot edit
t_ptpGain
=
0
50
0
T-axis Gain value during traveling
User cannot edit
t_stGain
=
0
1000
0
T-axis Gain value during positioning
User cannot edit
t_afterGain
=
0
50
0
T-axis Gain value during stopping
User cannot edit
t_P_CON_Start
=
0
6
0
T-axis P_CON start time (ms)
User cannot edit
t_integralGain
=
0
50
0
T-axis Integral gain
User cannot edit
t_AxisValid
=
0
1
0
T-axis 1: Valid this axis 0:Ignore this axis
User cannot edit
t_spare2
=
0
1
0
T-axis 1: Valid this axis 0:Ignore this axis
User cannot edit
t_CurveNo
=
0
2
0
T-axis Cam curve No.(1:sinusoidal transformation,NC2etc)
User cannot edit
u_MaxV
=
0
15000000
0
U-axis Max. speed (1500000 is the default value for the modified MTU, for the old type the value should be 100000000)
User cannot edit
u_MaxA
=
0
70000000
0
U-axis Max acceleration (70000000 is the default value for the modified MTU, for the old type the value should be 100000000)
User cannot edit
u_ptpGain
=
0
100
0
U-axis Gain value during traveling
User cannot edit
5/10
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
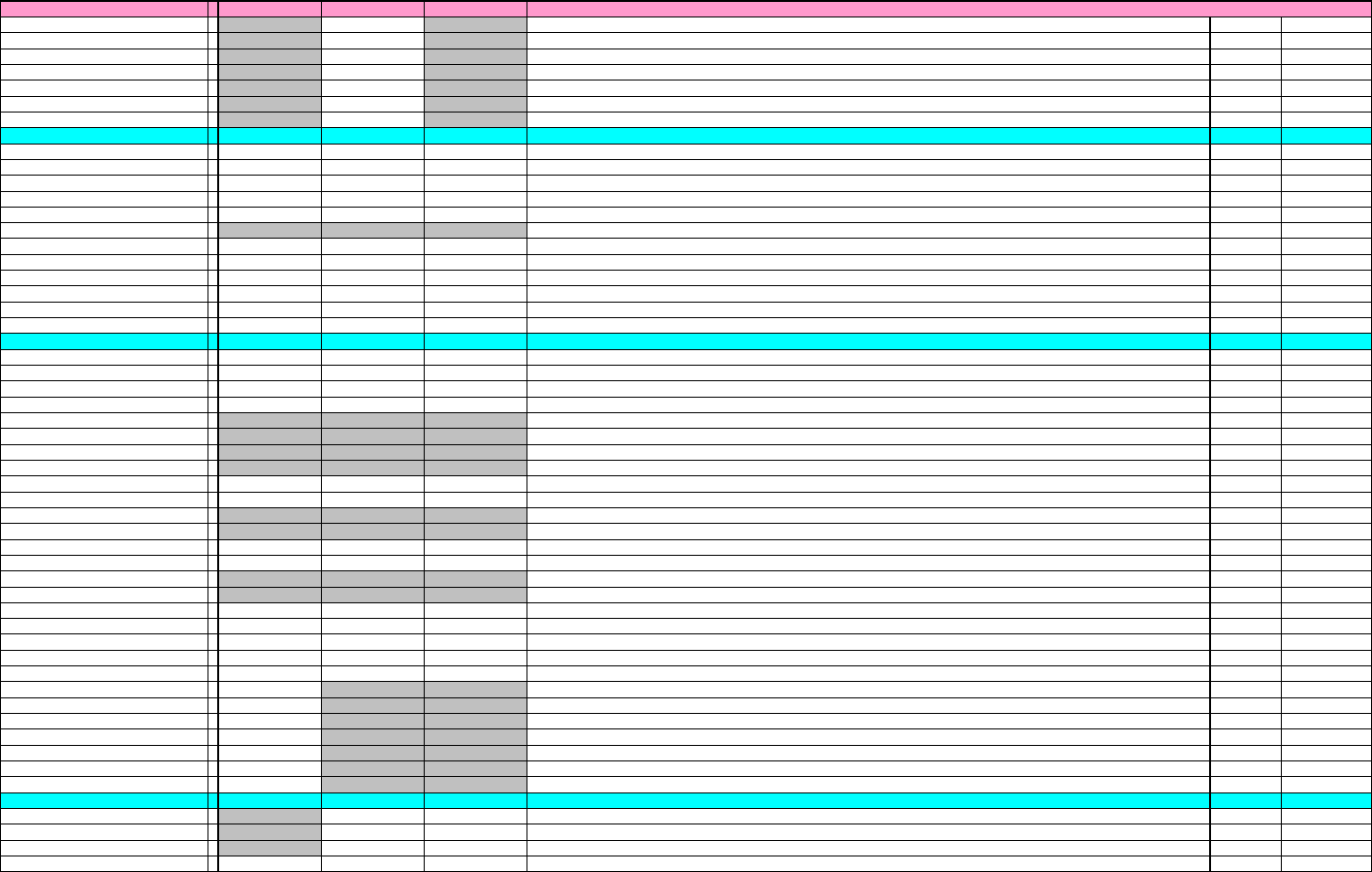
u_stGain
=
0
1000
0
U-axis Gain value during positioning
User cannot edit
u_afterGain
=
0
50
0
U-axis Gain value during stopping
User cannot edit
u_P_CON_Start
=
0
6
0
U-axis P_CON start time (ms)
User cannot edit
u_integralGain
=
0
40
0
U-axis Integral gain
User cannot edit
u_AxisValid
=
0
1
0
U-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
u_spare2
=
0
1
0
U-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
u_CurveNo
=
0
1
0
U-axis Cam curve No.(1:sinusoidal transformation 3:NC2etc) (1 is the default value for the new MTU, the old type should be set to 2).
User cannot edit
_______CAMERA_OFFSET_______
=
0
0
0
__Camera1DistanceX
=
101
68.5
68.5
X distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera1DistanceY
=
0
0
0
Y distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera2DistanceX
=
101
68.5
68.5
X distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera2DistanceY
=
0
0
0
Y distance from fiducial camera center to nozzle rotation center
Calibrated data
__DegFdclCam1Theta
=
0
0
0
Incline of fiducial camera 1 to the servo axis
Calibrated data
__DegFdclCam2Theta
=
0
0
0
Not used at present
User cannot edit
__Camera1CenterX
=
0
0
0
Camera center position X at side 1 (mm)
Calibrated data
__Camera1CenterY
=
0
0
0
Camera center position Y at side 1 (mm)
Calibrated data
__Camera1Theta
=
0
0
0
Tilt of camera at side 1(deg)
Calibrated data
__Camera2CenterX
=
0
0
0
Camera center position X at side 2 (mm)
Calibrated data
__Camera2CenterY
=
0
0
0
Camera center position Y at side 2 (mm)
Calibrated data
__Camera2Theta
=
0
0
0
Tilt of camera at side 2 (deg)
Calibrated data
_______MACHINE_ORIGIN______
=
0
0
0
X_Stage1org
=
412.1
436.5
436.5
X pickup origin at stage 1
Calibrated data
Y_Stage1org
=
8
7
10.5
Y pickup origin at stage 1
Calibrated data
X_Stage2org
=
422.9
557.5
256.5
X pickup origin at stage 2
Calibrated data
Y_Stage2org
=
805
842
830.5
Y pickup origin at stage 2
Calibrated data
X_Stage3org
=
0
0
0
X pickup origin at stage 3
User cannot edit
Y_Stage3org
=
0
0
0
Y pickup origin at stage 3
User cannot edit
X_Stage4org
=
0
0
0
X pickup origin at stage 4
User cannot edit
Y_Stage4org
=
0
0
0
Y pickup origin at stage 4
User cannot edit
Z_Stage1Surface
=
0.7
14.3
14.3
Pickup Origin (height) at stage 1
Calibrated data
Z_Stage2Surface
=
0.7
0.8
14.3
Pickup Origin (height) at stage 2
Calibrated data
Z_Stage3Surface
=
0
0
0
Pickup Origin (height) at stage 3
User cannot edit
Z_Stage4Surface
=
0
0
0
Pickup Origin (height) at stage 4
User cannot edit
__DevPitch1
=
16
20
20
Device pitch (stage 1)
User cannot edit
__DevPitch2
=
16
20
20
Device pitch (stage 2)
User cannot edit
__DevPitch3
=
0
0
0
Device pitch (stage 3)
User cannot edit
__DevPitch4
=
0
0
0
Device pitch (stage 4)
User cannot edit
X_BoardOrg
=
466.5
471.5
471.5
Board origin X (counter value)
Calibrated data
Y_BoardOrg
=
236.25
242.3
242.3
Board origin Y (counter value)
Calibrated data
Z_BoardSurface
=
0.7
1
1
Placement reference height (counter value)
Calibrated data
X_TableOrg
=
5
50
50
Robot retract position X (counter value)
User cannot edit
Y_TableOrg
=
400
350
350
Robot retract position Y (counter value)
User cannot edit
F_UpPoint
=
0
0
0
F-axis upper limit (counter value)
Calibrated data
F_DownPoint
=
-8.7
0
0
F-axis lower limit (counter value)
Calibrated data
G_UpPoint
=
0
0
0
G-axis upper limit (counter value)
Calibrated data
G_DownPoint
=
-8.7
0
0
G-axis lower limit (counter value)
Calibrated data
R_Pos1
=
0
0
0
Revolver rotation angle when nozzle 1 comes to the pickup position (XP141)
User cannot edit
Q_PosPick1
=
6.5
0
0
Q-axis pickup position when nozzle 1 comes to the pickup position
User cannot edit
Q_PosPlace1
=
0
0
0
Q-axis placing position when nozzle 1 comes to the [R_Pos1] position
User cannot edit
______NOZZLE_POSITION______
=
0
0
0
X_NzlPosX1
=
0
85
825
Nozzle station position (1) X
Calibrated data
Y_NzlPosY1
=
0
789.5
137
Nozzle station position (1) Y
Calibrated data
Z_NzlPosZ1
=
0
0.7
28.2
Nozzle station position (1) Z
Calibrated data
Z_NzlPosZH
=
9.6
52
52
Nozzle lift Max. height
Calibrated data
6/10