xp141-241-341-5.0E.pdf - 第212页
P P r r o o p p e e r r D D a a t t a a L L i i s s t t S S o o f f t t w w a a r r e e V V e e r r s s i i o o n n V V 1 1 . . 4 4 0 0
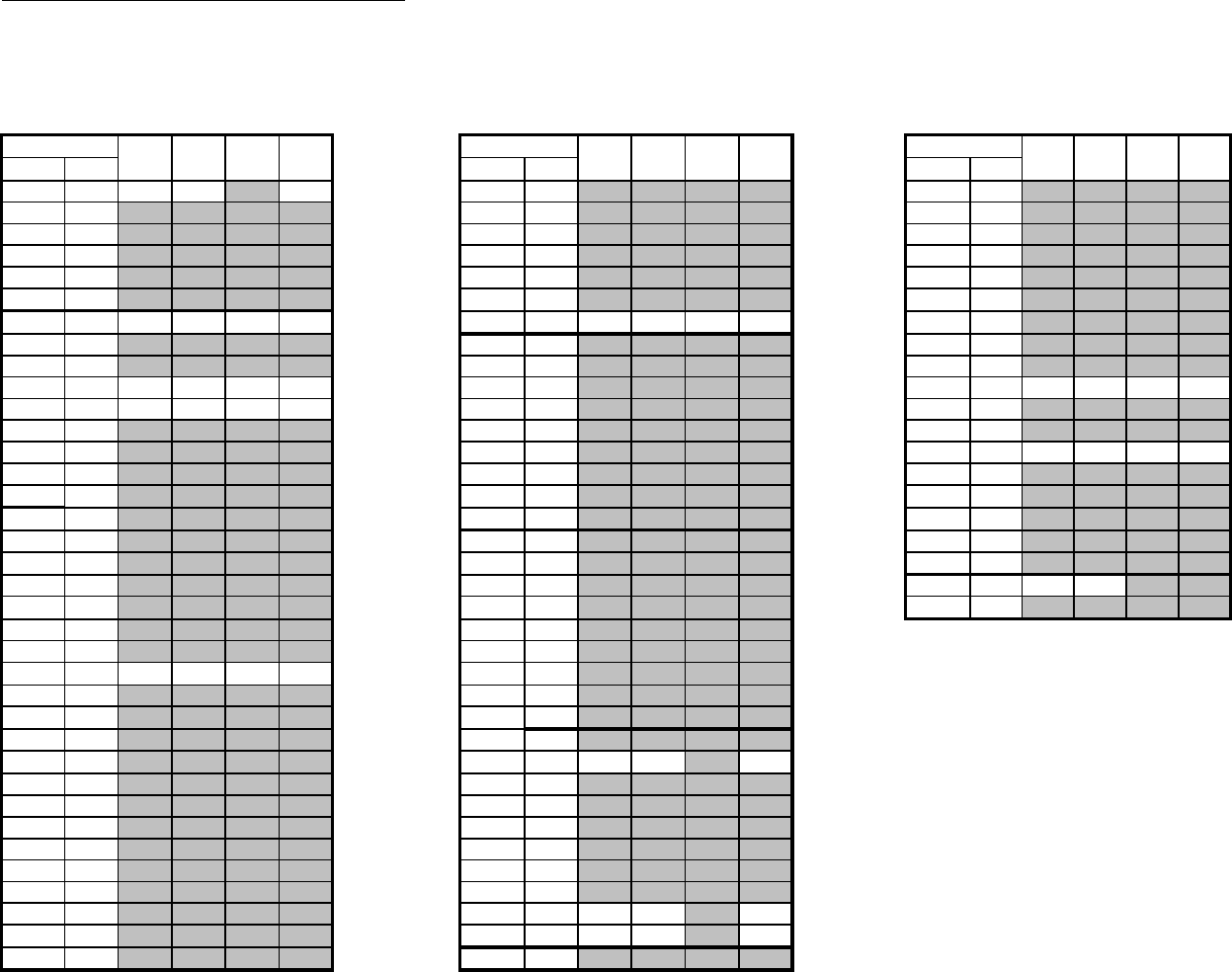
XP341E SERVO AMP. PARAMETER
Standard Parameter Sheet of Machine
Vol. 1
No.1
Axis Axis Axis
Parameter No Default
X
Y
Z
Q
Parameter No Default
X
Y
Z
Q
Parameter No Default
X
Y
Z
Q
Pn 000 OOOO OOO1 OOO1 OOOO OOO1 Pn 11E 100 100 100 100 100 Pn 501 10 10 10 10 10
Pn 001 OOOO OOOO OOOO OOOO OOOO Pn 11F 0 0 0 0 0 Pn 502 20 20 20 20 20
Pn 002 OOOO OOOO OOOO OOOO OOOO Pn 120 0 0 0 0 0 Pn 503 10 10 10 10 10
Pn 003 OOO2 OOO2 OOO2 OOO2 OOO2 Pn 121 50 50 50 50 50 Pn 504 7 7 7 7 7
Pn 004 OOOO OOOO OOOO OOOO OOOO Pn 122 0 0 0 0 0 Pn 505 1024 1024 1024 1024 1024
Pn 005 OOOO OOOO OOOO OOOO OOOO Pn 123 0 0 0 0 0 Pn 506 0 0 0 0 0
Pn 100 40 70 100 160 240 Pn 124 0 30 30 30 30 Pn 507 100 100 100 100 100
Pn 101 2000 2000 2000 2000 2000 Pn 200 OOOO OOOO OOOO OOOO OOOO Pn 508 50 50 50 50 50
Pn 102 40 40 40 40 40 Pn 201 16384 8192 8192 8192 8192 Pn 509 20 20 20 20 20
Pn 103 0 216 317 409 282 Pn 202 4 4 4 4 4 Pn 50A 2100 8101 8101 8101 8101
Pn 104 40 50 70 100 120 Pn 203 1 1 1 1 1 Pn 50B 6548 6548 6548 6548 6548
Pn 105 2000 2000 2000 2000 2000 Pn 204 0 0 0 0 0 Pn 50C 8888 8888 8888 8888 8888
Pn 106 40 40 40 40 40 Pn 205 65535 65535 65535 65535 65535 Pn 50D 8888 8C88 8C88 8C88 8C88
Pn 107 0 0 0 0 0 Pn 206 16384 16384 16384 16384 16384 Pn 50E 3211 3211 3211 3211 3211
Pn 108 7 7 7 7 7 Pn 207 OOOO OOOO OOOO OOOO OOOO Pn 50F OOOO OOOO OOOO OOOO OOOO
Pn 109 0 0 0 0 0 Pn 208 0 0 0 0 0 Pn 510 OOOO OOOO OOOO OOOO OOOO
Pn 10A 0 0 0 0 0 Pn 300 600 600 600 600 600 Pn 511 8888 8888 8888 8888 8888
Pn 10B OOOO OOOO OOOO OOOO OOOO Pn 301 100 100 100 100 100 Pn 512 OOOO OOOO OOOO OOOO OOOO
Pn 10C 200 200 200 200 200 Pn 302 200 200 200 200 200 Pn 600 0 90 40 0 0
Pn 10D 0 0 0 0 0 Pn 303 300 300 300 300 300 Pn 601 0 0 0 0 0
Pn 10E 0 0 0 0 0 Pn 304 500 500 500 500 500
Pn 10F 0 0 0 0 0 Pn 305 0 0 0 0 0
Pn 110 10 12 12 12 12 Pn 306 0 0 0 0 0 Note
Pn 111 100 100 100 100 100 Pn 307 40 40 40 40 40
Pn 112
100 100 100 100 100
Pn 308
0
0
0
0
0
Pn 113 1000 1000 1000 1000 1000 Pn 400 30 30 30 30 30
Pn 114 200 200 200 200 200 Pn 401 100 150 120 100 60
Pn 115 32 32 32 32 32 Pn 402 800 800 800 800 800
Pn 116 16 16 16 16 16 Pn 403 800 800 800 800 800
Pn 117 100 100 100 100 100 Pn 404 100 100 100 100 100
Pn 118 100 100 100 100 100 Pn 405 100 100 100 100 100
Pn 119 50 50 50 50 50 Pn 406 800 800 800 800 800
Pn 11A 1000 1000 1000 1000 1000 Pn 407 10000 10000 10000 10000 10000
Pn 11B 50 50 50 50 50 Pn 408 0 1 1 0 1
Pn 11C 70 70 70 70 70 Pn 409 2000 1400 1500 2000 1500
Pn 11D 100 100 100 100 100 Pn 500 7 7 7 7 7
For software versions prior to T1.21g, Pn201 = 16384,
and _ServoPulseReduce = 0. For T1.21g and later
versions Pn201 = 8192 and _ServoPulseReduce = 1.
P
P
r
r
o
o
p
p
e
e
r
r
D
D
a
a
t
t
a
a
L
L
i
i
s
s
t
t
S
S
o
o
f
f
t
t
w
w
a
a
r
r
e
e
V
V
e
e
r
r
s
s
i
i
o
o
n
n
V
V
1
1
.
.
4
4
0
0
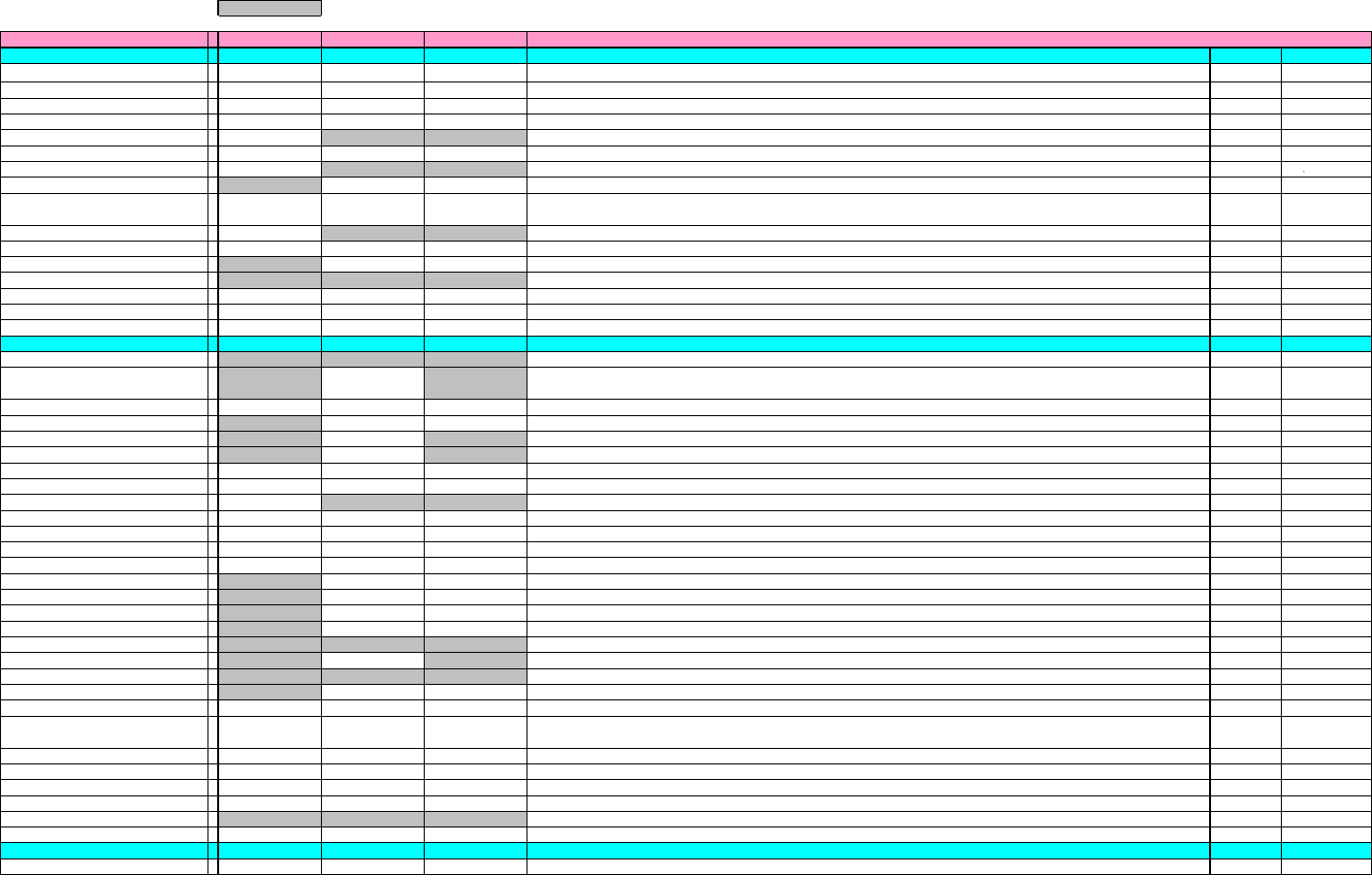
XP Proper Data List V1.40
14/11/2002
//_/_/_/_/_/_/_/ Proper data /_/_/
Not Used
Note:
Items added have been added from V1.30.
Item
XP141
XP241
XP341
Description
Reboot
________MACHINE_TYPE_______
=
0
0
0
l
= reboot
__xpMachineTypeA = 1 2 3 M/C Type [1: XP141, 2: XP241, 3: XP341]
User cannot edit
__xpMachineTypeB
=
4
4
4
M/C Type (Board loading size) [All M/C type: 4]
User cannot edit
__xpMachineTypeC
=
1
1
1
M/C Type [All M/C type: 1] (Not used at present)
User cannot edit
__xpMachineTypeD
=
1
1
1
M/C Type [1: Mass production machine (Ordinary setting), 0: proto-type] (Different I/O is used)
User cannot edit
__xpTI1200A
=
1
0
0
[1: Camera type TI-1200A] (XP141)
User cannot edit
__ServoPulseReduce
=
1
1
1
0: Pn201 = 16384 1: Pn201 = 8192
User cannot edit
__DispMode
=
1
0
0
Display mode [0: No display during Vision processing, 1: Display only overlay, 2: display all] (XP-141E)
User can edit
__CornerRearSide
=
0
2
2
Flag to compensate the value by referring the corner pattern at rear side (XP241E, XP341E)
User cannot edit
l
__PanelReverseFlow = 0 0 0
Specifying the board transference direction: 0: Left to Right 1: Right to Left (only use with a left to right program) 2:
Right to left (it is possible to run with a standard flow program)
User cannot edit
__RevolverInterLock
=
0
0
0
*1 Add Tape leaf check sensor and nozzle raise check sensor [T1.12e, T1.09h] [Setting is changed to "0", in the case, hardware modification is necessary.]
User cannot edit
l
__SmemaFlag
=
0
0
0
SMEMA Flags [0: Standard (FUJI signal), 1: SMEMA spec (in conformity to 1.2)]
User can edit
__Coplanarity
=
0
0
0
Coplanarity function [0: w/o coplanarity 1: w/coplanarity]
User cannot edit
__LightingSystem
=
0
0
0
Not used at present
User cannot edit
__ASSystem
=
0
0
0
Setting for special customize M/C [0: Standard machine (Ordinary setting), 1: w/ special changeover mode]
User cannot edit
l
__ConvOutSensor
=
0
0
0
Out conveyor board arrival check sensor [0: no sensor 1: sensor installed]
User cannot edit
__BackupPlateSensor
=
0
0
0
Backup Plate interference check sensor [0: no sensor 1: sensor installed]
User cannot edit
_________OPERATION_________
=
0
0
0
__BrightLevelArrv
=
0
0
0
*2 Bright level to check the board arrival (valid under __MainStArrvFDChkFlag setting is 1) [ordinary 250]
User cannot edit
__TrayDetectMotion = 0 2 0
Specifying the tray top surface detection check 0: Do not carry out. 1: Carry out automatically when [Ready On] is
pressed. 2: Carry out automatically during tray motion.
User can edit
__GateMotionSwitch
=
0
0
0
Placing mode [0: Enable program settings, 1: Arch motion, 2: Gate motion]
User can edit
__DisposeWaitTime
=
0
100
100
Head stop time before rejecting parts above the reject place (msec)
User cannot edit
__TrayAdsorbTime
=
0
1000
0
Head(w/remover) stop time when it comes at tray pickup position to carry out tray eject (msec)
User cannot edit
__DisposeConvSide
=
0
0
0
[0: Mass production machine (Ordinary setting), 1: Limited mass production machine] (XP241)
User cannot edit
__TapeCutterUseChk
=
0
0
0
Waste tape cutter during automatic operation [0:used 1:not used]
User can edit
__TapeCutterActiveQty
=
1
1
1
Activate waste tape cutter function [0, 1: every time after board is load out. 2~:after every time certain quantities of boards are produced]
User can edit
__ResetCylORTime
=
10
0
0
Timer to activate the Reset cylinder before last placing nozzle is reached to lower limit [T1.12e, T1.09h]
User cannot edit
__PlaceDownEndTimer
=
0
50
50
Lower limit timer during placement (msec)
User cannot edit
__DeviceSetChkUse
=
1
1
1
Parts supply check [0:not used 1:used]
User can edit
__ConvErrTime
=
0
0
0
Arrival check timer for next machine (msec) [0~10000: 10000msec, 10001~: setting time (msec), Upper limit is 60000]
User cannot edit
__ConveyerMode
=
1
1
1
Conveyor flow mode [0:standard 2:special (load next board after all boards are load out from m/c)]
User can edit
__PickUpTimerSide1
=
0
50
50
Extend Side1pickup time (msec)
User cannot edit
__PickUpTimerSide2
=
0
100
50
Extend Side2 pickup time (msec)
User cannot edit
__PickVaccumStartTime
=
0
50
50
Parts pickup vacuum start time (Starts vacuuming before it reaches pickup position.) (msec)
User cannot edit
__VacuumDesTime
=
0
70
70
Time of Air blow (msec)
User cannot edit
__VT130ImageProcTwice
=
0
0
0
Not used at present
User cannot edit
__TrayEjectCheck
=
0
2
0
Tray load out check [0:invalid, 1:valid(Old Sensor), 2: valid(New Sensor)]
User cannot edit
l
__DesStartTime
=
0
0
0
Not used at present
User cannot edit
__MultiImageNotDisp
=
0
0
0
Display mode for multi image acquisition [0:Display, 1:Not displaying acquired image during processing (Shorten the process time)]
User can edit
__ConvMtrSpeed
=
340
340
340
Board loading speed [Standard is 340 mm/sec (same as the setting 0)] (Upper limit is 340)
User cannot edit
__BlackMaskLevel = -1 88 88
A function, when the brightness is less than the appointed brightness (at vision processing) assuming it as same
brightness and carry out noise elimination [(-1~255) -1:Auto calibration]
User cannot edit
__PCFtpUse
=
0
0
0
Remote file setting [0:invalid 1:valid]
User can edit
__TemplateFind
=
3
3
3
VT18 template file name search priority [0, 1:Part No. is the priority, 2:Part type is the priority, 3:Referring only part type.]
User can edit
__MainLifterUpEndTimer
=
350
350
350
Lifter raised timer (set it when the vision processing is started before board clamp is completed. Ex. Ceramic PCB) [T1.09e,T1.12c]
User can edit
__FiducialLampOnTimer
=
0
0
0
Lamp on timer (set it when the image is acquired before lighting amount becomes to be enough) [T1.09e,T1.12c]
User can edit
__MainStArrvFDChkFlag
=
0
0
0
*2 Board detect check by mark camera [0:not used 1:use] [T1.12f]
User cannot edit
l
__ThermalOffsetTime
=
0
360
360
Timing of thermal offset. Set to 0 to bypass the thermal offset.
User can edit
_________SERVO_OFST________
=
0
0
0
__targetOfst_X
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
1/10