JX-200_动作说明书.pdf - 第22页
Rev. 1.0 动作说明书 中心的 VCS 的轴、 θ 轴的速度分类 Z 轴、 θ 轴的速度分类 吸附时的 Z 轴 贴装时的 Z 轴 元件种类 最小元件宽度 ( W ) 下降 上升 下降 上升 θ 轴 Min ≦ W ≦ 8.0 高速 2 高速 2 中速 中速 中速 8.0 < W < 20 高速 2 低速 中速 中速 中速 QFJ(PLCC) 、 SOJ J 引脚插座 翅式插座 减震插座 单向引脚插头 20 ≦ W < Max 高速…
Rev. 1.0
动作说明书
3-5 Zθ 轴动作
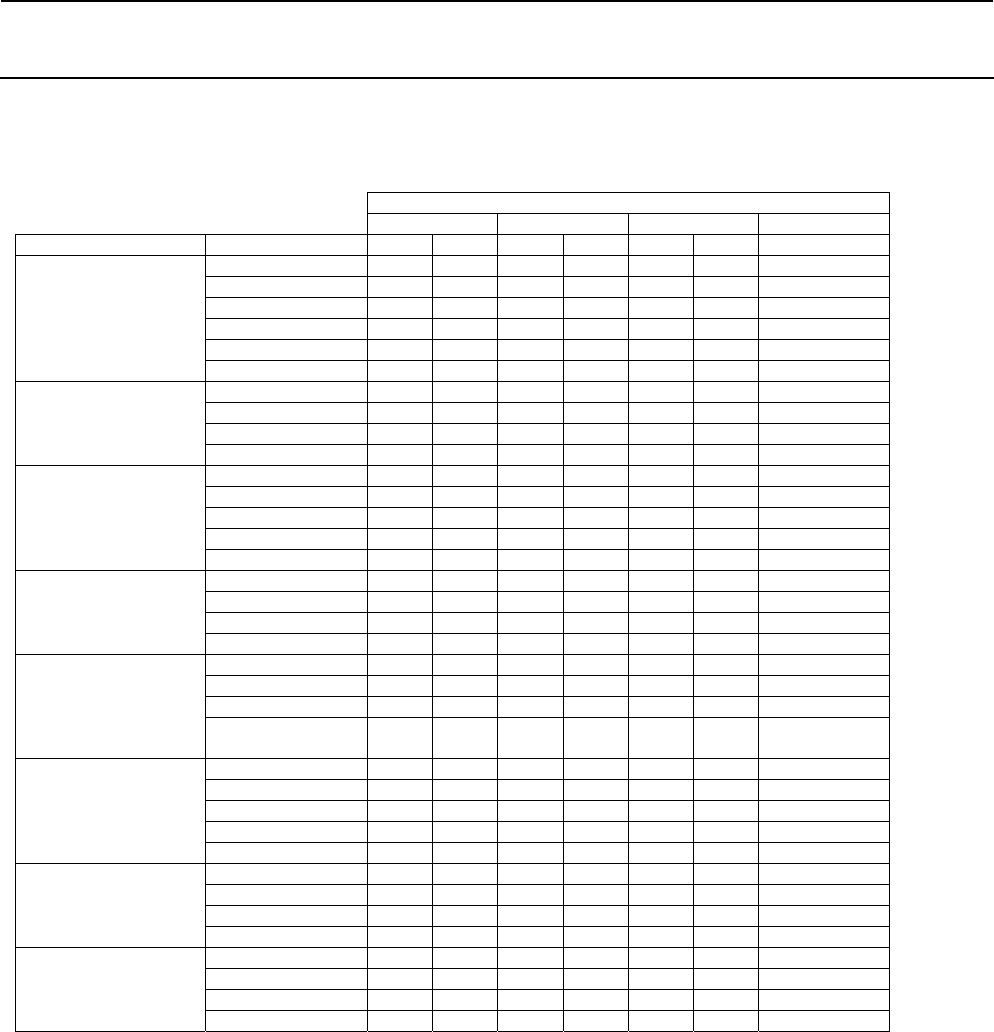
3-5-1 Z 轴的速度分类
中心为 LA 的轴、θ 轴的速度分类
Z轴、θ轴的速度分类
吸附时的Z轴 贴装时的Z轴 θ轴
元件种类 最小元件宽度 (W) 下降 上升 下降 上升 测定 测定外 典型的元件
Min ≦ W <0.45 高速 中速 高速 2 高速 2 高速 高速 0603
0.45 ≦ W <1.1 高速 2 高速 2 高速 2 高速 2 高速 高速 1005、1608
1.1 ≦ W ≦8.0 高速 2 高速 2 高速 2 高速 2 高速 高速 2012、3216
8 < W <20 高速 2 低速 高速 2 高速 2 高速 高速
方芯片
方芯片 (LED)
网络阻抗
20 ≦ W <Max 高速 2 低速 高速 2 高速 2 高速 低速
Min ≦ W ≦8.0 高速 2 中速 高速 2 低速 高速 高速
8.0 < W <20 高速 2 低速 高速 2 低速 高速 高速
散件
20 ≦ W <Max 高速 2 低速 高速 2 低速 高速 低速
Min ≦ W <1.1 高速 2 高速 2 高速 2 中速 高速 高速 Smini、SOT23
1.1 ≦ W ≦8.0 高速 2 高速 2 高速 2 中速 高速 高速
8.0 < W <20 高速 2 低速 高速 2 中速 高速 高速
SOT
20 ≦ W <Max 高速 2 低速 高速 2 中速 高速 低速
Min ≦ W ≦8.0 高速 2 高速 2 高速 2 低速 高速 高速
8.0 < W ≦20 高速 2 低速 高速 2 低速 高速 高速
铝电解电容器
钽电容器
微调电容器、GaAsFET
20 < W <Max 高速 2 低速 高速 2 低速 高速 低速
Min ≦ W ≦8.0 高速 2 高速 2 中速 中速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 中速 低速 中速
QFJ(PLCC)、SOJ
J引脚插座
翅式插座
减震插座
单向引脚插头
20 < W <Max 高速 2 低速 中速 中速 低速 低速
Min ≦ W <5.0 高速 2 高速 2 中速 低速 中速 中速
5.0 ≦ W ≦8.0 高速 2 高速 2 中速 低速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 低速 低速 中速
SOP
TSOP、TSOP2
HSOP
双向引脚插头
Z导线连接器
20 < W <Max 高速 2 低速 中速 低速 低速 低速
Min ≦ W ≦8.0 高速 2 高速 2 中速 中速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 中速 低速 中速
QFP
QFN
BGA
BQFP(PGFP)
20 < W <Max 高速 2 低速 中速 中速 低速 低速
Min ≦ W ≦8.0 高速 2 高速 2 高速 2 高速 2 高速 高速
8.0 < W ≦20 高速 2 低速 高速 2 高速 2 高速 高速
其他
20 < W <Max 高速 2 低速 高速 2 高速 2 高速 低速
3-
11
Rev. 1.0
动作说明书
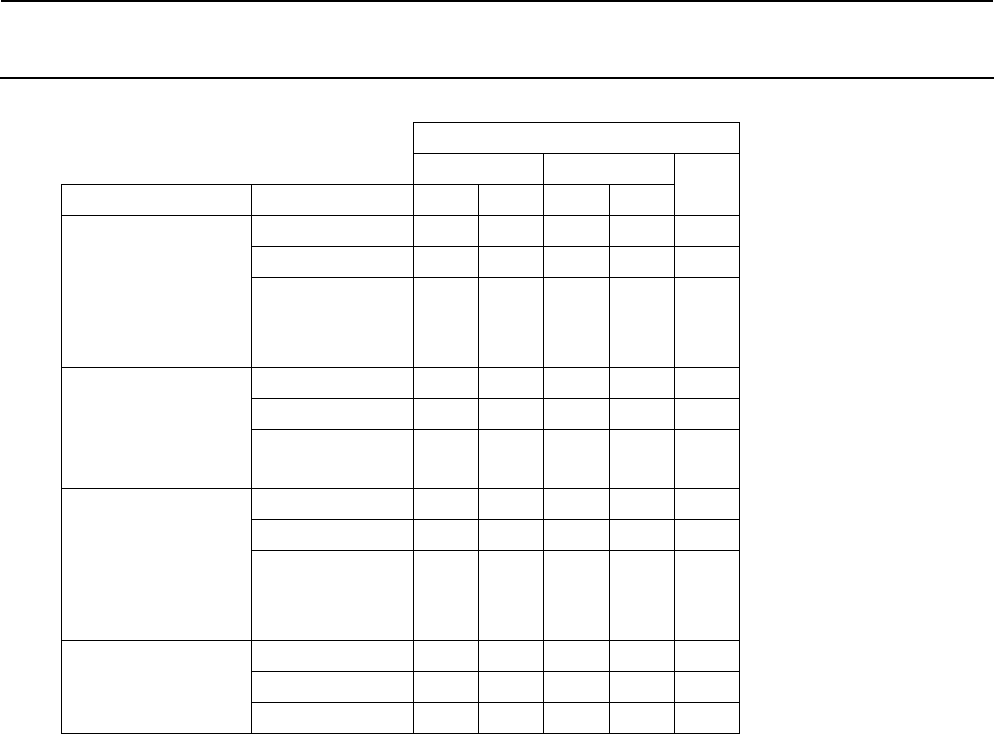
中心的 VCS 的轴、θ 轴的速度分类
Z轴、θ轴的速度分类
吸附时的 Z 轴 贴装时的 Z 轴
元件种类 最小元件宽度 (W) 下降 上升 下降 上升
θ轴
Min≦ W ≦8.0 高速 2 高速 2 中速 中速 中速
8.0< W <20 高速 2 低速 中速 中速 中速
QFJ(PLCC)、SOJ
J 引脚插座
翅式插座
减震插座
单向引脚插头
20≦ W <Max 高速 2 低速 中速 中速 低速
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
SOP、HSOP
TSOP、TSOP2
双向引脚插头
Z 导线连接器
20≦ W <Max 高速 2 低速 低速 低速 低速
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
QFP、QFN
BGA、FBGA
BQFP(PQFP)
外形识别元件
通用图形元件
20≦ W <Max 高速 2 低速 低速 低速 低速
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
铝电解电容器
钽电容器
微调电容器、GaAsFET
20≦ W <Max 高速 2 低速 低速 低速 低速
注 1) 贴装时 Z 轴上升,元件高度为 4.7mm 以上时,无条件地变换成低速。
注 2) 护罩打开速度、θ 轴不设定,仅 Z 轴设定。但是 Z 轴移动中,护罩都不能变换。另外,吸附下降,
吸附上升,贴装下降,贴装上升的中速、低速的 2 阶段控制的护罩打开速度与高速一样为 1 阶段控
制。
注 3) 上述高速 2 为 GX-4 以前的机种编制的贴装程序的高速、把贴装程序新编制、旧机种的贴装程序变
换之后成为高速 2。
3-
12
Rev. 1.0
动作说明书
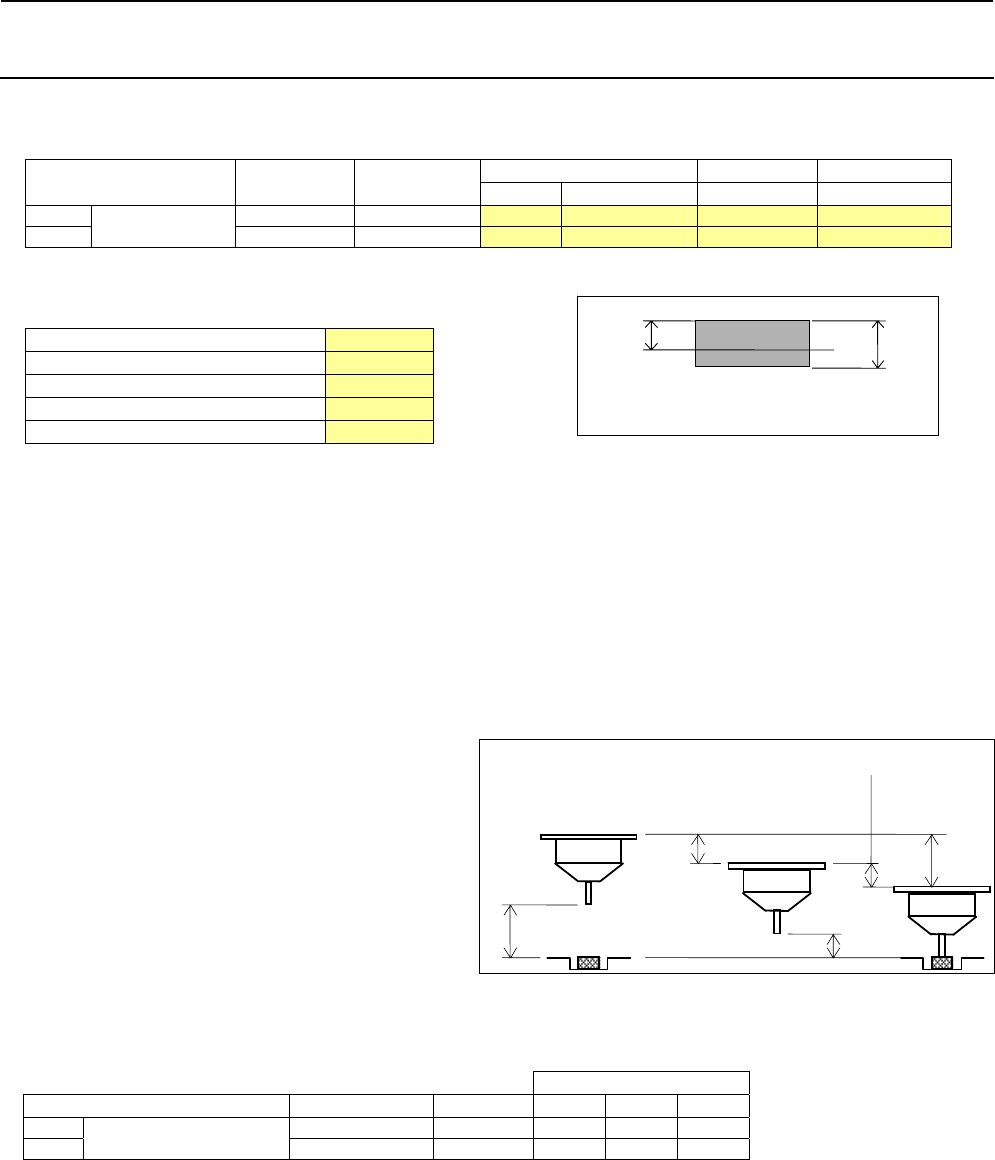
3-5-2 Z 轴的动作行程
各机种的XY移动高度α,激光高度β (单位∶mm)
XY 移动高度α 激光高度β VCS 识别高度γ机种 原稿高规格 贴装头
基板上 除基板上以外
(1) 12 LNC 15.0 28.0 42.5 28
(2)
JX-200
20 LNC 23.0 28.0 42.5 28
Z轴驱动行程计算条件 (单位: mm)
t
h
h: 元件厚度
t: 激光测定高度
元件厚度 h = 0.8
激光测定高度 t = 0.4
吸附压入量 0.2
贴装压入量 0.5
2 段控制高度 2.0
(注 1) 吸附压入量和贴装压入量上述取消时的元件数据可以变更。
(注 2) 吸附下降·吸附上升·贴装下降·贴装上升个别元件数据可以分高速·中速·低速·低速 2 进行
设定。
(注 3) 吸附下降·吸附上升·贴装下降·贴装上升、分中速、低速·低速 2,2 阶段设定。
(注 4) 2 阶段控制高速作为上述取消时可以在机械控制参数变更。
(注 5) 通过激光进行零件检测的高度,LA 识别零件时为激光测量高度、VCS 识别零件时为 h/2。
(注 6) 吸附元件后、贴装前是通过 LA 确认有无元件,故有时不反映 XY 移动高度
。
3-5-2-1 吸附下降时的 Z 轴动作
α
A1
A2
A
2
待机高度
吸附高度
元件识别方式(行程与 LA、VCS 无关)
1) 行程分类 A LA、VCS 识别
Z 轴的吸附下降为从 XY 移动高度下降。
移动量 A=XY 移动高度α + 吸附压入量
移动量 A1=XY 移动高度α − 2
移动量 A2=2 + 吸附压入量。
吸附下降
机种 元件高度规格 贴装头
A A1 A2
(1) 12 LNC 28.2 26.0 2.2
(2)
JX-200
20 LNC 28.2 26.0 2.2
3-
13