JX-200_动作说明书.pdf - 第71页
Rev. 1.0 动作说明书 BASE 基板上实装有 4 个跨接端口。以下说明其设置方法。 W1 、 W3 、 W4 按如下设置。 W2 根据选项和 EN 规格,有不同设置。 W1 W2 W3 W4 12 91 0 14 7 1 0 36 9 1 2 1 3 W4(3P) :2- 3ピン 間 ショ ート W2(2 ×5 P ) : 1- 2ピ ン 間シ ョ ー ト時HO D (ST)非常停止無効 :3-4ピ ン 間ショート時 フロント側…
Rev. 1.0
动作说明书
5-1-5 BASE 基板
位于 IO-CONVEYOR 基板与 BASE 部/
。
护罩部电器之间,对以下信号进行中继
① IN、OUT、STOP、IN OUT 传感器(READ)
② 支承台、驱动气缸、ATC、限动器等 SV
。
的驱动 (WRITE)
③ ATC 开闭(WRITE)及其确认传感器(READ)
④ 送料器浮起传感器、初压检测传感器、真空校正传感器(READ)
⑤ 校正块 LED 的亮灯、真空的启动、信号灯的驱动(WRITE)
⑥ XY 轴的±极限传感器、与位置运动控制板间交换 NEAR
。
传感器信号
BASE 基板上安装 4 个 LED。以下是各 LED 的意义。
LD1(绿) ;正在从+24V 输出由电路板内部生成的 3.3V
。
时亮灯
LD2(绿) ;+24V
。
正在输入到电路板内部时亮灯
LD4(绿) ;正在输入+12V
。
时亮灯
LD5(绿) ;正在输入+5V
。
时亮灯
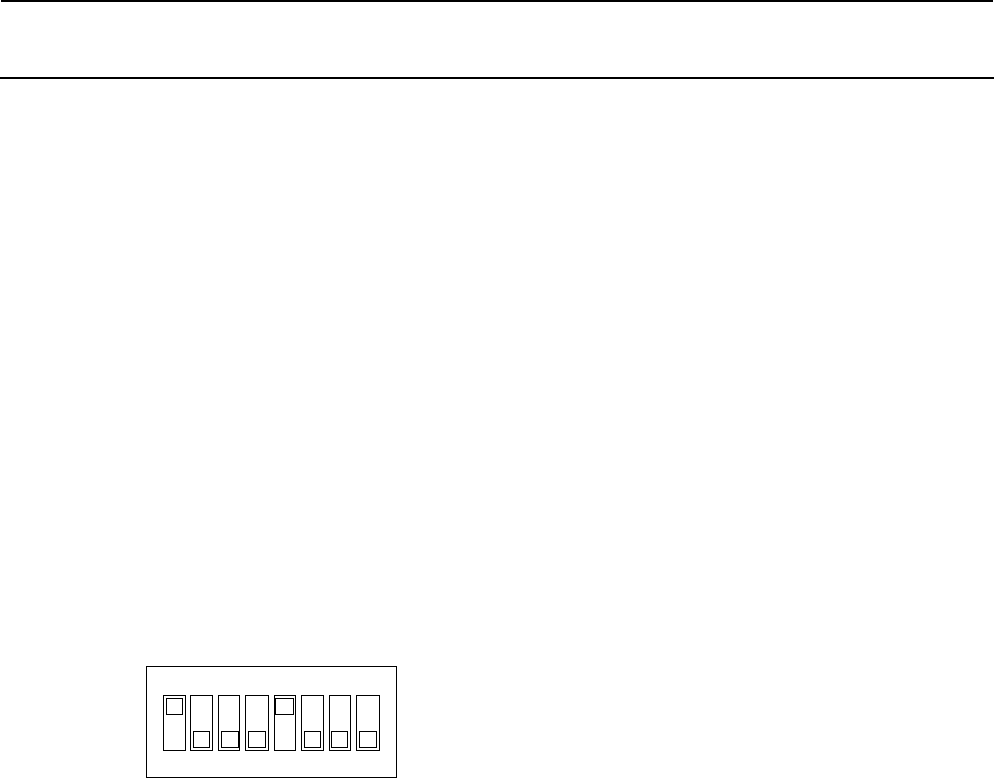
BASE 基板上安装1个 Dip 开关。其意义是用于设定图形及功能版本。
1
O
N
2
3
4
5
6
7
8
SW1
パターン及び機能REV.設定用
Bit1~Bit4:パターンREV.
Bit2~Bit4:機能REV.
設定は、BASE PCB ASM REVISION NOTE
を参照のこと。
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit8: 图形版本
设定要参照 BASE PCB ASM REVISION NOTE。
5-
6
Rev. 1.0
动作说明书
BASE 基板上实装有 4 个跨接端口。以下说明其设置方法。
W1、W3、W4 按如下设置。W2 根据选项和 EN 规格,有不同设置。
W1
W2
W3
W4
12
910
14710
36912
1
3
W4(3P)
:2-3ピン間ショート
W2(2×5P)
:1-2ピン間ショート時HOD(ST)非常停止無効
:3-4ピン間ショート時フロント側非常停止無効
:5-6ピン間ショート時リア側非常停止無効
:7-8ピン間ショート時フロント側カバーオープン無効
:9-10ピン間ショート時リア側カバーオープン無効
W1(2P)
:ショート
W3(3×4P)
:2-3ピン間ショート
:5-6ピン間ショート
:8-9ピン間ショート
:11-12ピン間ショート
W5
12
34
W5(2×2P)
1-2ピン間、3-4ピン間ショート時、HOD(EN)の非常停止無効
:標準時、標準+HODオプション有り時、EN+HODオプション無し時は左図の通り。
W2
12
910
HOD(ST)オプションありの場合は、左図の通り。
全てオープン。
ST時、オプションなしの設定は、左図の通り。
1-2ピン間ショート、他オープン
W2
12
910
EN仕様時は、左図の通り。
1-2ピン間、5-6ピン間ショート、他オープン。
W2
12
910
部にジャンパを設定のこと。
W5
12
34
:EN+HODオプション有り時、1-2ピン間オープン、3-4ピン間オープン
:短路
:1-2pin 间短路时 HOD 紧急停止无效
:3-4pin 间短路时正面侧紧急停止无效
:5-6pin 间短路时背面侧紧急停止无效
:7-8pin 间短路时正面侧护罩打开无效
:9-10pin 间短路时背面侧护罩打开无效
:2-3pin 间短路
:5-6pin 间短路
:8-9pin 间短路
:11-12pin 间短路
:2-3pin 间短路
要在
部设置跨接。
ST 时,无选项的设定如右图所示
。
1-2pin 间短路,其他为开路
有 HOD(ST)选项时,如左图所示
。
全部为开路
。
EN 规格时,如左图所示
。
1-2pin 间短路,5-6pin 间短路,其他为开路
1-2pin 间
、
3-4pin 间短路时,HOD(EN)的紧急停止无效
:标准时
、
有标准+HOD 选项时
、
无 EN+HOD 选项时,如左图所示
。
有 EN+HOD 选项时,1-2pin 间开路
、
3-4pin 间开路
5-
7
Rev. 1.0
动作说明书
5-1-6 贴装头主基板
贴装头主基板通过传送串行I/F与 IO-CONVEYOR 基板进行通信,是控制贴装头部的
I/O的基板。有下列内容。
(1)真空和流动用电磁阀的驱动
(2)读取真空传感器检测的真空数据。
(3)Z 轴的减速传感器状态向 Zθ 轴伺服放大器输出
(4)HMS 的 I/F
(5)OCC 图像的中继
(6)OCC 照明控制
(7)贴装头提升气缸电磁阀的驱动
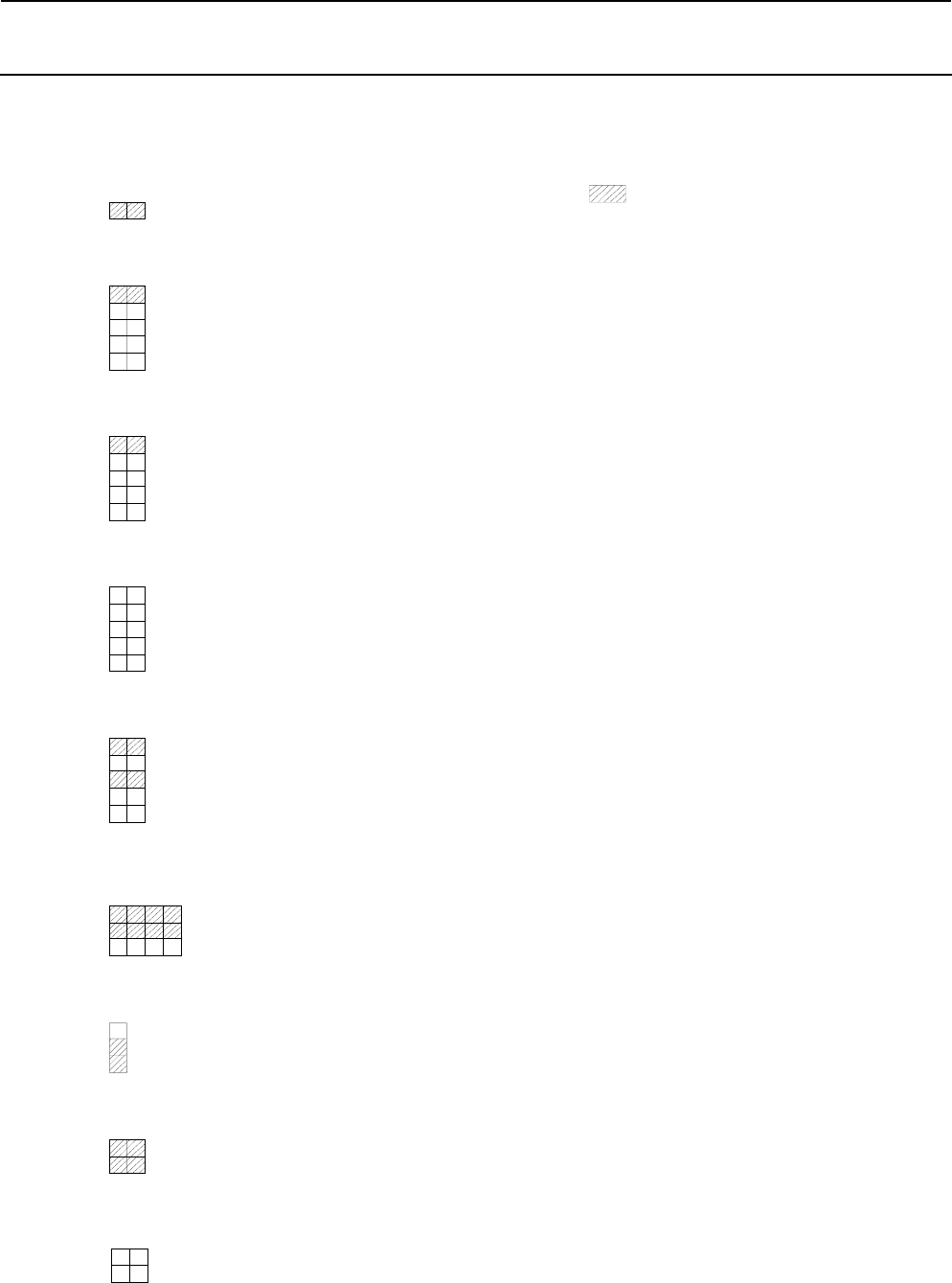
①构成贴装头的基板
ヘッドメイン基板
ヘッド中継基板
OCC A LIGHT基板
OCC C LIGHT基板
贴装头主基板
贴装头中转基板
OCC A LIGHT
基板
OCC C LIGHT
基板
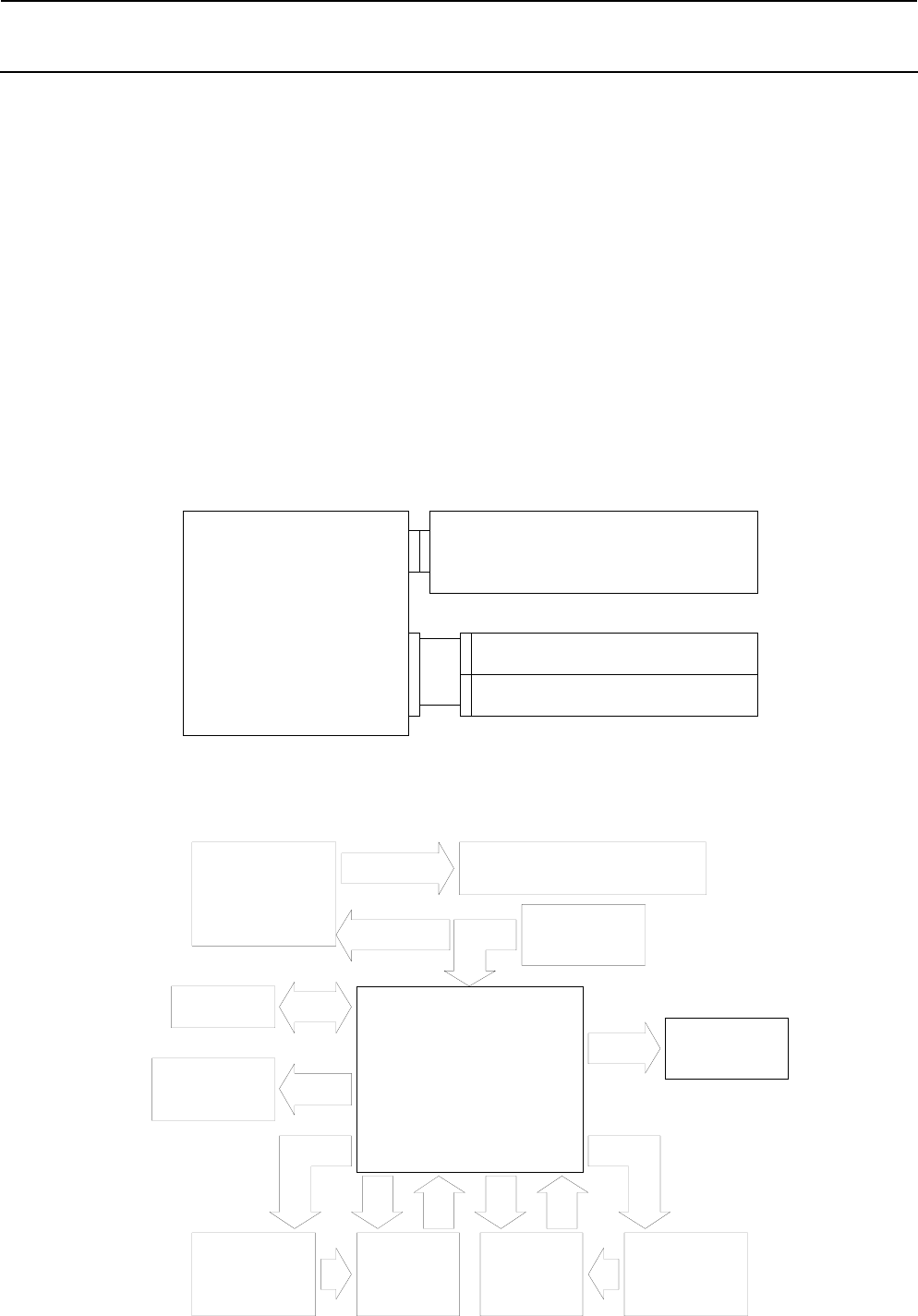
②贴装头基板的方块图
贴装头主基板的功能方块图如下所示。
ヘッドI/Oコントローラ
(CPLD)
センサ入力I/F
サーボアンプI/F
LNC60 I/F
(θ軸エンコーダ信号分配)
シリパラI/F
アナログI/F
(真空圧センサ)
8bitA/D
変換器
12bitA/D
変換器
アナログI/F
(HMS)
トランジスタI/F
OCC照明
制御I/F
伺服放大器 I/F
并串行 I/F
晶体管 I/F
模拟 I/F
(真空压力
传感器)
贴装头 I/O 控制器
(CPLD)
LNC60 I/F
(θ 轴编码器信号分配)
传感器输入
I/F
OCC
照明
控制 I/F
8Bit A/D
变换器
12Bit A/D
变换器
模拟 I/F
(HMS)
5-
8