JX-200_动作说明书.pdf - 第26页
Rev. 1.0 动作说明书 3-5-2-4 识别下降时的 Z 轴动作 按照元件有无检测方式 ( L A 、真空 ) ,行程分类分 为 2 种。 ( 参照下表 ) α F 待机高度 识别高度 γ 右图为行程分类 F 。 行程分类 LA ⎯ ⎯ 识别方式 VCS F H LA × { 有无元件的检测 真空 { × 1) 行程分类 F V C S 识别、 Va 检测 X Y → VCS VCS 识别元件用真空检测有无元件时, Z 轴的吸附上…
Rev. 1.0
动作说明书
3-5-2-3 LA 的元件识别时的 Z 轴动作
VCS 识别元件检测真空元件 NG 时,为了用 LA 识
别,追加 2 个行程分类。(参照下表)
M
α
β
待机高度
识别高度
右图为行程分类 M。
行程分类
LA
⎯ ⎯
识别方式
VCS M I
LA
{ {
有无元件的检测
真空
{ {
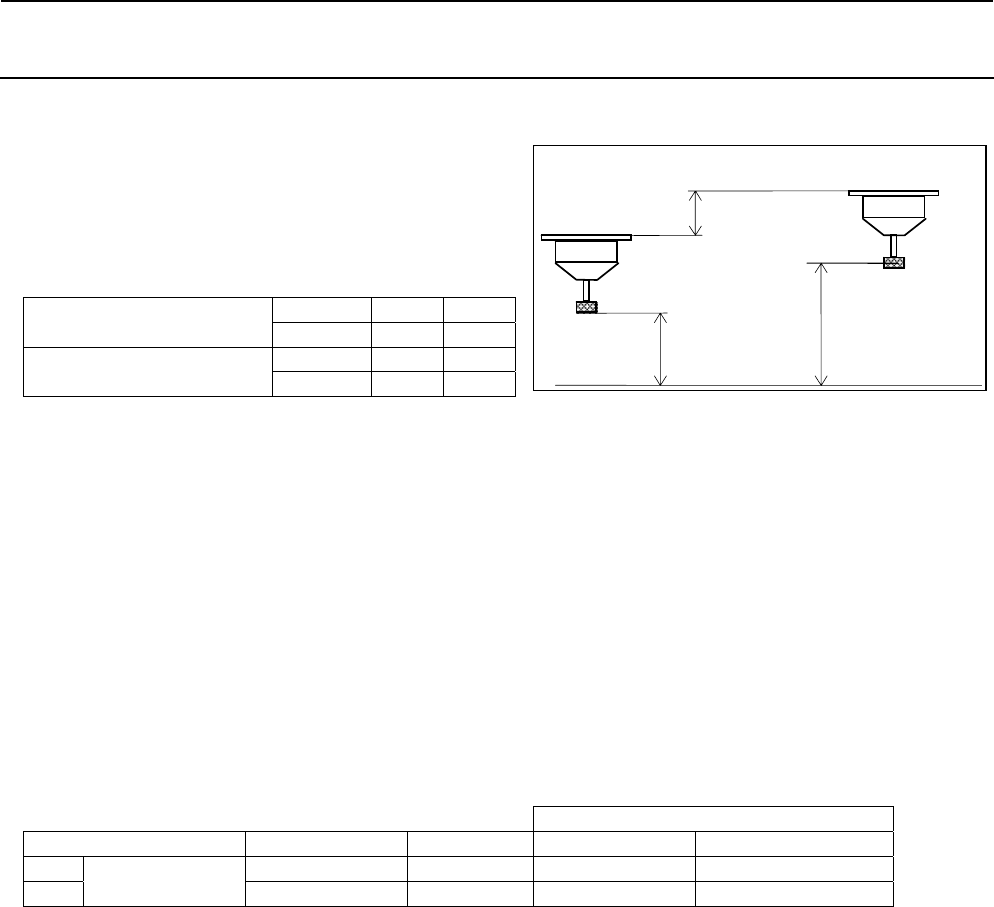
1) 行程分类 M VCS识别、LA 检测 XY → LA
VCS 识别元件,用真空检测有无元件为 NG 时,为了用 LA 检测有无元件,Z 轴识别上升从 XY 移动
高度上升。
移动量 M=激光高度β - h/2 - XY移动高度α
2) 行程分类 I VCS识别、LA 检测 LA → XY
VCS 识别元件,用 LA 检测有无元件后的 Z 轴识别下降,为激光高度开始下降。
移动量 I=激光高度β - h/2 - XY移动高度α
3) Z 轴行程
吸附下降
机种 元件高度规格 贴装头 M I
(1) 12 LNC 14.1 14.1
(2)
JX-200
20 LNC 14.1 14.1
3-
15
Rev. 1.0
动作说明书
3-5-2-4 识别下降时的 Z 轴动作
按照元件有无检测方式 (LA、真空),行程分类分
为 2 种。(参照下表)
α
F
待机高度
识别高度
γ
右图为行程分类 F。
行程分类
LA
⎯ ⎯
识别方式
VCS F H
LA
×
{
有无元件的检测
真空
{
×
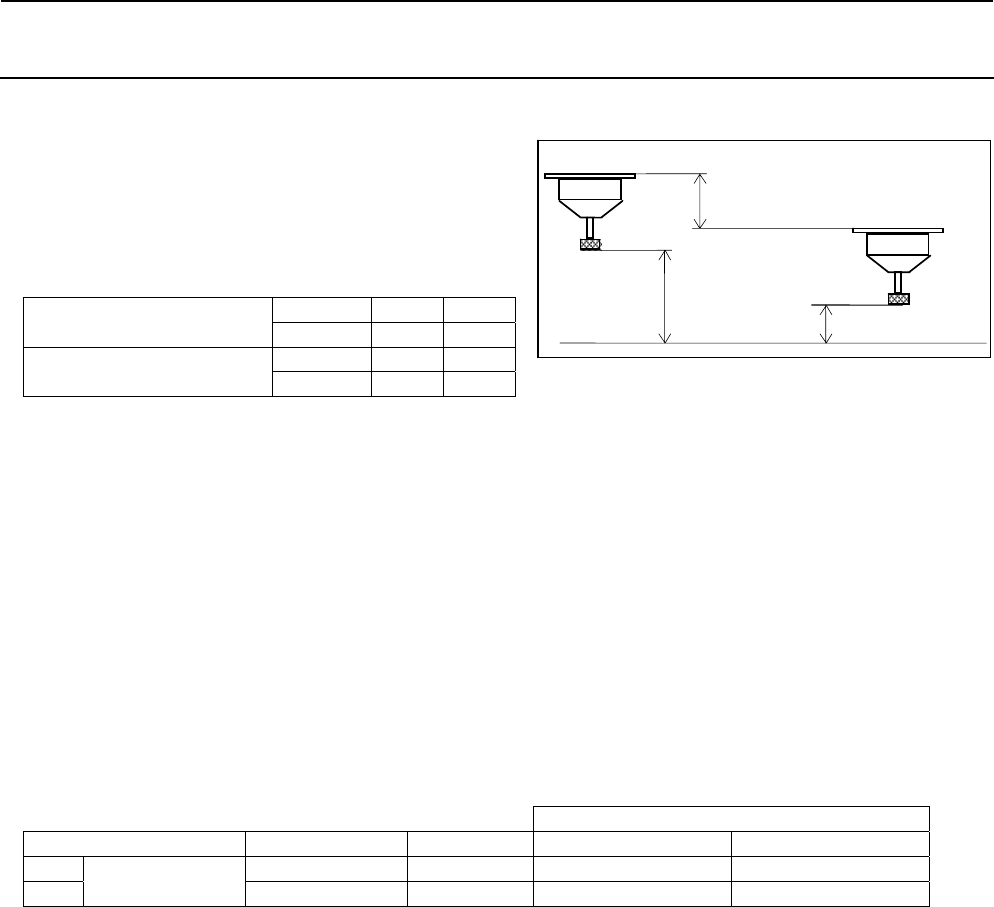
1) 行程分类 F VCS识别、Va 检测 XY → VCS
VCS 识别元件用真空检测有无元件时,Z 轴的吸附上升为 XY 移动高度的下降。但由于 XY 移动高度
与 VCS 识别高度相等,Z 轴不动作。
移动量 F=XY 移动高度α - VCS移动高度γ
2) 行程分类 H VCS识别、LA 检测 LA → VCS
VCS 识别元件用真空检测有无元件时,Z 轴的识别下降从激光高度下降。
移动量 H=激光高度β - h + t - VCS识别高度γ
3) Z 轴行程
吸附下降
机种 元件高度规格 贴装头 F H
(1) 12 LNC 0 14.1
(2)
JX-200
20 LNC 0 14.1
3-
16
Rev. 1.0
动作说明书
3-5-2-5 识别上升时的 Z 轴动作
按照检测有无元件方式 (LA、真空),行程分类分
为 2 种。(参照下表)
J
γ
α
识别高度 待机高度
右图为行程分类 J。
行程分类
LA
⎯ ⎯
识别方式
VCS J L
LA
×
{
检测有无元件
真空
{
×
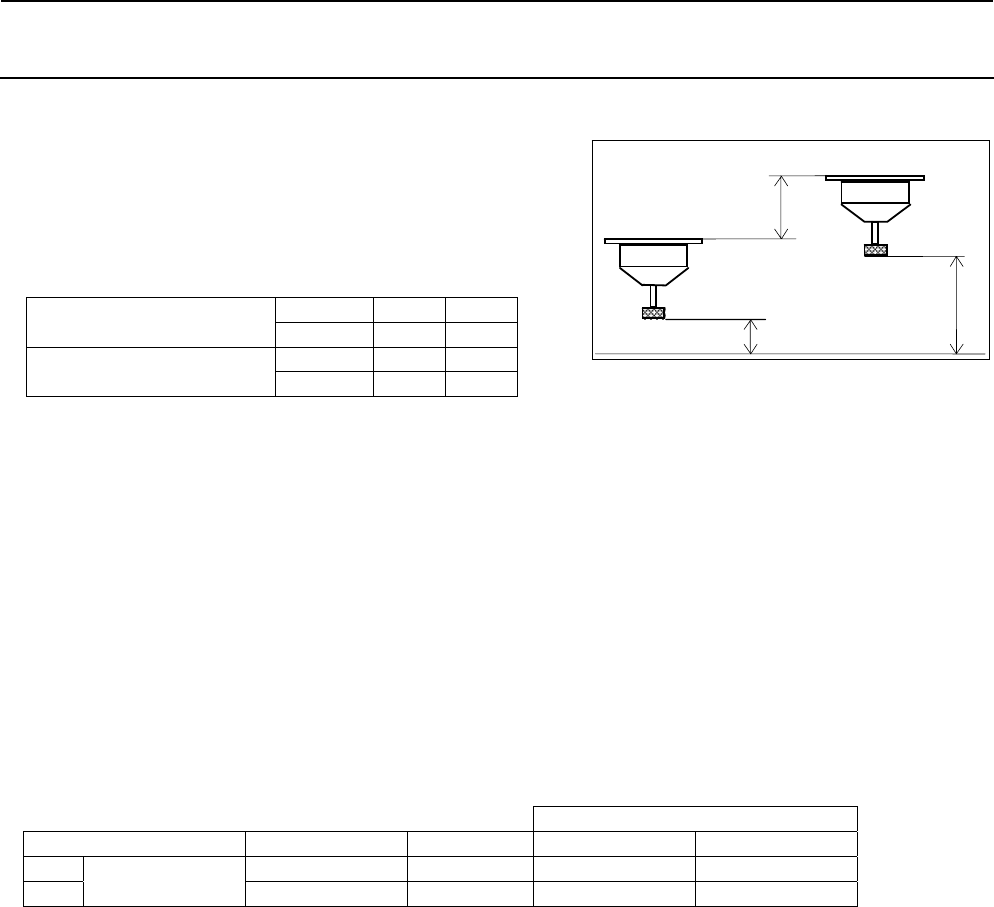
1) 行程分类 J VCS识别、Va 检测 VCS → XY
VCS 识别元件,用真空检测有无元件时,Z 轴的识别上升为向 XY 轴高度上升。但由于 XY 移动高度
与 VCS 识别高度相等,Z 轴不动作。
移动量 J=XY 移动高度α - VCS识别高度γ
2) 行程分类 L VCS识别、LA 检测 VCS → LA
VCS 识别元件,用 LA 检测有无元件时,Z 轴的识别上升为向激光高度上升。
移动量 L=激光高度β - VCS识别高度γ - h + t
3) Z 轴行程
吸附上升
机种 元件高度规格 贴装头 J L
(1) 12 LNC 0 14.1
(2)
JX-200
20 LNC 0 14.1
3-
17