MSR 规格说明书.pdf - 第8页
- 2 - MSR 2001.4.1 2. 特 特 特 特 长 长 长 长 通过反射·透过并用识别功能 通过反射·透过并用识别功能 通过反射·透过并用识别功能 通过反射·透过并用识别功能 , 从微小片状元件到 从微小片状元件到 从微小片状元件到 从微小片状元件到 QFP 均能高速·高精度进行贴装。 均能高速·高精度进行贴装。 均能高速·高精度进行贴装。 均能高速·高精度进行贴装。 • 选择适应贴装元件的吸嘴和元件识别方式 , 从微小元件…
- 1 -
MSR 2001.4.1
1. 概
概概
概 要
要要
要
通过6种吸嘴和反射·透过并用元件识别方式,从微小元件到PLCC,QFP,CSP,广范围的元件的高速高精度贴装
都成为可能。
并且,通过自动元件识别示教功能和独自的提示功能,大大地提高了操作性和维修性。
=与现行机的共同性=
最大基板的尺寸 M、XL尺寸
M尺寸的基板即使400 × 270mm也能对应。
基板的厚度 标准: 0.5∼4mm尺寸的基板以夹制方式,不需调整。
搬送方向 右→左、左→右 自由选择
基板下要求尺寸 30mm能够对应
基板搬送方式 传送带搬送方式
基板矫正方式 标准是夹制方式,基板识别对应
(但是,没有基板识别标志的情况下定位销是必要的)
轨道自动宽度调节 轨道自动宽度调节功能为标准装备
3色信号灯 标准装备
RS-232C
NC数据的入出力,I/O监视系统,生产管理情报转送
数据出力印刷机 标准装备
装备软盘格式 3.5英寸 2个方式对应 (1.44MB、1.2MB)
维修灯 标准装备
不良标志的识别 标准装备
使用基板摄相机型(指定推荐不良标志)

- 2 -
MSR 2001.4.1
2. 特
特特
特 长
长长
长
通过反射·透过并用识别功能
通过反射·透过并用识别功能通过反射·透过并用识别功能
通过反射·透过并用识别功能,从微小片状元件到
从微小片状元件到从微小片状元件到
从微小片状元件到QFP均能高速·高精度进行贴装。
均能高速·高精度进行贴装。均能高速·高精度进行贴装。
均能高速·高精度进行贴装。
• 选择适应贴装元件的吸嘴和元件识别方式,从微小元件到
□
32的QFP、广范围的元件进行最适当的贴
装。并且,BGA、CSP元件也能贴装。
• 通过装备基板摄相机、能够高精度地进行元件贴装。
• 由于具有以下2种识别摄相机,使高精度贴装变成可能。
• 反射·透过并用识别摄相机 (2视野−视野尺寸
□
6、
□
36)
• 基板识别摄相机
• 自动高度调节功能
吸嘴的高度,即使吸着过程中也能够调整,并且,为了防止过度压力引起元件破损,基板的高度(XY工作
台)
即使在贴装中也能够进行调整,以求提高贴装的信赖性。
把元件供给部分割成
把元件供给部分割成把元件供给部分割成
把元件供给部分割成2部分
部分部分
部分,即使机器在稼动中也能进行元件交换
即使机器在稼动中也能进行元件交换即使机器在稼动中也能进行元件交换
即使机器在稼动中也能进行元件交换,从而大大的提高了稼动率。
从而大大的提高了稼动率。从而大大的提高了稼动率。
从而大大的提高了稼动率。
不但具有推荐规格的
不但具有推荐规格的不但具有推荐规格的
不但具有推荐规格的75站
站站
站 + 75站
站站
站
※
※※
※
,而且准备了
而且准备了而且准备了
而且准备了50站
站站
站 + 50站
站站
站
※
※※
※
,30站
站站
站+ 30站
站站
站
※
※※
※
可进行选择对应
可进行选择对应可进行选择对应
可进行选择对应,充实了元件供
充实了元件供充实了元件供
充实了元件供
给部的多样品种变化。
给部的多样品种变化。给部的多样品种变化。
给部的多样品种变化。
※ 使用双料架时最大可以搭载300,200,120品种。
使总生产性提高
使总生产性提高使总生产性提高
使总生产性提高
•通过采用IPC (选择),当元件断档时,可自动地进行切换时元件的确认作业,削减了设备停止损失。(元件
装错确认功能以及,OR元件
※
自动切换,自动更新元件残数的初期值)
• 搬入部、XY工作台 (Y方向)、搬出部的宽度自动调节的标准装备,使准备交换的时间达到缩短。
※所谓的OR元件是指具有同一电气特性的元件。
即使是谁都能简单地操作
即使是谁都能简单地操作即使是谁都能简单地操作
即使是谁都能简单地操作
• 由于具有独自的提示功能,即使万一发生了故障,在画面上能够显示处理方法,操作者只要按照画面上
的提示就可以简单地排除故障。
• 通过新方式,示教的时间得到大幅度地缩短,通过元件形状的数据库反复示教也能容易地进行。
• 维持高品质·高信赖的情报管理[程序编辑・选择・稼动状况 (元件情报・吸嘴管理・料架管理)・生
产管理情报]通过日语汉字彩色显示屏幕能够轻松地进行对话。
• 吸嘴,以及料架的交换通过触击方式进行。
追求快适无声设计
追求快适无声设计追求快适无声设计
追求快适无声设计
• XY工作台,自动变换控制同时到达的加速度。
• 对于筐体设计运用振动解析技术。
• 主要驱动部采用AC伺服电机。
• 通过在头部搭载θ旋转电机和减速机,使头部能够顺利地进行θ旋转,实现了高精度贴装。
- 3 -
MSR 2001.4.1
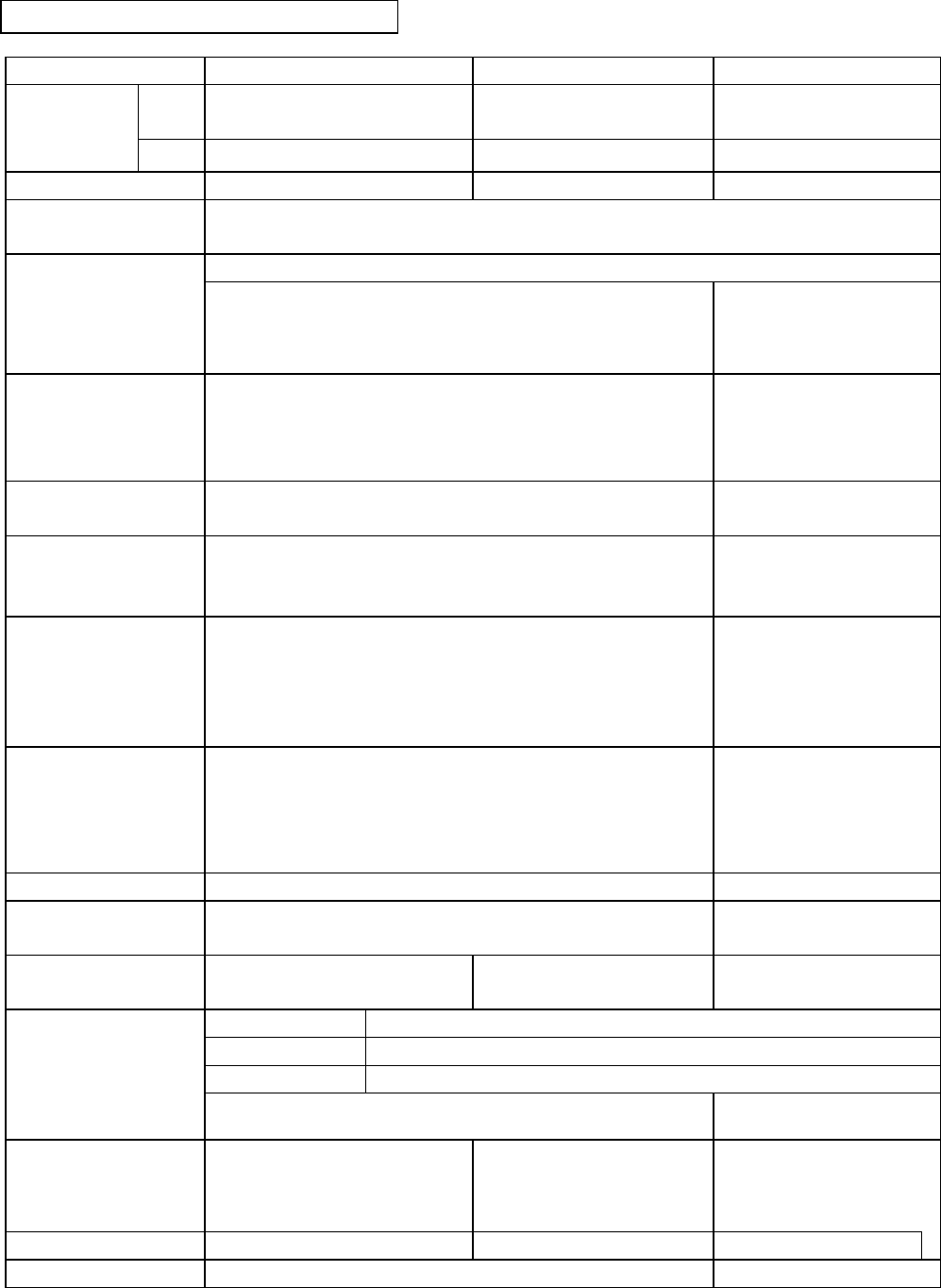
MSR 字匂号鯉
字匂号鯉字匂号鯉
字匂号鯉
㍻ 朕
M
樫雁
XL
樫雁
姥深
樫雁
Max. 330 × 250mm
Min. 50 × 50mm
Max. 510 × 460mm
Min. 50 × 50mm
聞喘辛嬬児医
搾業 0.5∼4.0mm 0.5∼4.0mm
薮廾辛嬬袈律 Max. 330 × 244mm Max. 510 × 454mm
斤哘児医 崕噂罫児医、桟剳横詮亘略児医(盲管児医、辛坊來児医、銚峨周聞喘扮萩総佩斌霧)
恷寄嶷楚:3Kg
児医斜崙圭塀 (0.5∼4.0mm) 児医搾業斤哘
( 児医協了圭塀)
泌惚短嗤児医紛艶炎崗議秤趨和宥狛協了㈹序佩樟屎。(葎僉
夲周)
※ 短嗤児医炎崗旺拝匆短嗤協了迅議秤趨和、參式聞喘盲
管児医議秤趨和、辛総佩斌楚。
児医錐業斤哘 徭強錐業距准
• 補秘轟祇
• 補竃轟祇
• X-Y垢恬岬(Y圭㏍轟祇)
圷周淫廾侘塀 園揮圷周:壌已岷抄ø178∼382mm 喜墮創尺悳嶷楚
/1岬 Max. 150kg
喜墮圷周方 恷寄150嫋(75+75)、100嫋 (50+50)、60嫋 (30+30)
注) 8mm、12mm創尺喜墮扮
圷周工公何蛍葎2何蛍
褒触塀創尺扮
Max. 300、200、120嫋
斤℡圷周 1.0603∼QFP
□
32mm
(炎彈: 恷弌哈重寂鉦 0.5mm)
2. CSP Max.
□
25
(恷弌白寂鉦 0.5mm)垈猷彜圷周俶勣蒙歩議簾恁。。
恷寄圷周互業:6mm
園揮錐業
8、12、16、24、32、44mm
薮廾准田 Max.約0.08秒/点 (0.08∼0.5秒/泣豚寂辛序佩13倖准粁譜
協) (0.08昼/泣訳周)
XY卞強袈律12mm參和
圷周工公何:耕協賜宀褒触塀創尺/1Pitch卞強
(吸着位置固定的情况下除外)
因贴装角度,元件吸着状
态,XY工作台速度,元件厚
度而不同。
圷周薮廾圭㏍ 0°∼359.99° (0.01°汽了譜協辛嬬)
薮廾娼業 ·0.075mm/3σ以内 (淫根θ指廬XY)
·4°/3σ以内
功象圷周寄弌·侘彜遇音
揖
児医厚算扮寂
(XY岬 )
埃2.2昼 埃2.7昼 音根XY工作岬卞強,嗤扮
咀児医号鯉遇音揖。
聞喘腎賑儿 0.5MPa
腎賑㍾継楚 埃100L/min. (A.N.R.)
腎賑送秘笥 PT 1/4B 汽銭俊匂(晩叫垢匍郵侘30PM)
腎儿購狼
注) 儿抹字譜崔阻蛍宣邦匂才蛍宣嗟匂、萩工公賠準、孤夬議
儿抹腎賑。
字匂樫雁 海 7,220mm NM-HD10
錐 1,997mm
互 1,829mm
(佚催満互2,000mm)
海 7,220mm NM-HD15
錐 2,187mm
互 1,829mm
(佚催満互2,000mm)
NM-HD11、NM-HD12、
NM-HD16、NM-HD17
參貧字匂萩歌深25匈
字匂嶷楚 埃4,600kg NM-HD10 埃4,700kg NM-HD15 音淫凄創尺
巓律梁業 20°C±10°C
MSR 2000.2.4