Heller维修手册.pdf - 第50页
47 HC1/HC2 控制器回流炉设置向导 型号: 客户名称: CO # 序列号: 软件版本: 日期: 第 1 页 回流炉型号: 1088 1500 1700 1800 1800 ( 9 Zone ) 1900 788 回流炉方向: 从左至右 从右至左 使用定制背景 HC1X HC2 HC2 IP 地址: ___.____.____.____ 单位:您希望使用什么单位? 温度: ℃ 或…
46
47
HC1/HC2 控制器回流炉设置向导
型号: 客户名称:
CO# 序列号: 软件版本: 日期:
第
1
页
回流炉型号:
1088 1500 1700 1800
1800(9 Zone)
1900 788
回流炉方向:
从左至右 从右至左
使用定制背景
HC1X
HC2
HC2 IP 地址:
___.____.____.____
单位:您希望使用什么单位?
温度:
℃
或
℉
速度: /分钟 冷却设定点: _95
_度
长度:
厘米
或
英寸
HC2 全局工艺高温: _450
_度
启动参数:
下一组启动前的最大输出: 80%
启动延迟时间 : 5秒
启动组中加热区最大数量: 4
热电偶短路检测:
加热器最低温升: 5℃或 9℉(IR 面板 1℃)
温升检查周期 : 60 秒
电源警告 : 100%
回流炉标签文字: 断电检测时间 : 15 秒
回流炉(OVEN)
不透明背景
安全:
; 密码保护总览工作室?
启动以下程序:
去除对显示设定的访问
文件路径: ________________________
启动条形码阅读器
条形码出错时有声报警
设
定条形码路径
默认语言: ________________
____ IO 日志天数(假定为连续运行的回流炉)
第
2
页
选项:
中心板支撑的升降 模拟式风扇(用于冷却)
最小%____
中心板支撑的升降反馈
第二中心板支撑的升降
模拟式风扇 2(全炉吸风机)
氮气计算机控制
最小%____
第二中心板支撑的升降反馈
标准中心板支撑位图[第一]
标准中心板支撑位图[第二]
自动净化/热备
氧气分析仪设置
氮气净化/热备传感器输入:__________
净化时间:____分钟
正常时间:____分钟
助焊剂冷凝保养选项
{ 空气[定时] Gen-5
{ 氮气[配方] Gen-5
{ Gen-9
第二助焊剂加热器,
模拟热电偶输入: _______________
TPO输出:___________________
第三助焊剂加热器,
模拟热电偶输入: _______________
TPO输出:___________________
净化输出: _______________________
配方输出: ______________________
载入 Autoclean.job 定制信息:
______________________________________
间隔: _______ 小时
循环持续时间:
分钟
循环启动检查:
分钟
助焊剂加热器延迟:
分钟
第 1 阶段: _______分钟
第 2 阶段: _______分钟
纯色灯塔
定制信息/报警
定制信息/报警 2
助焊剂过滤器(Gen-4,保
养指示器)
间隔时间:___小时
助焊剂加热为加热区
可视助焊剂 1 加热器
可视助焊剂 2 加热器
可视助焊剂 3 加热器
48
自动润滑#1
间隔: _____小时
持续时间:____ 秒
Auto Lube # 2
间隔: _____小时
持续时间:____ 秒
其它选项
冗余过热
灯塔绿色开启
灯塔绿色关闭
加热风扇故障
水温过高报警
排气量低报警:(秒)
警告: 15
报警: 30
加热区吸风机
A 区激活
低速 中速 高速
_____ _____ _____
B 区激活
_____ _____ _____
C 区激活
_____ _____ _____
用户可以自动退出
退出时间: ______小时 _____分钟
吸风机起动至 100%功率的时间: _____秒
定制信息/报警设置:
数字输入:_____________________________
输出: ____________________________
灯塔:_____________________________
显示文字: _____________________________
(注意:确认已安装适当的硬件)
生效: _________
类型: __________
延迟: ______ 秒
有声(蜂鸣器)
氧气分析仪设置:
单控制区监视器
多控制区监视器
禁止氧气分析仪
闭环带热备控制
正常 PPM 水平: _____
热备 PPM 水平: _______
释放自动净化/热备数字输出
报警 2 选择:
报警 2 高
报警 2 低
报警 1
报警 1 正常水平: _____
报警 1 热备水平: ______
(注意:对闭环带热备控制选项,同时选择“自动净化/热备”选项)
第
3
页
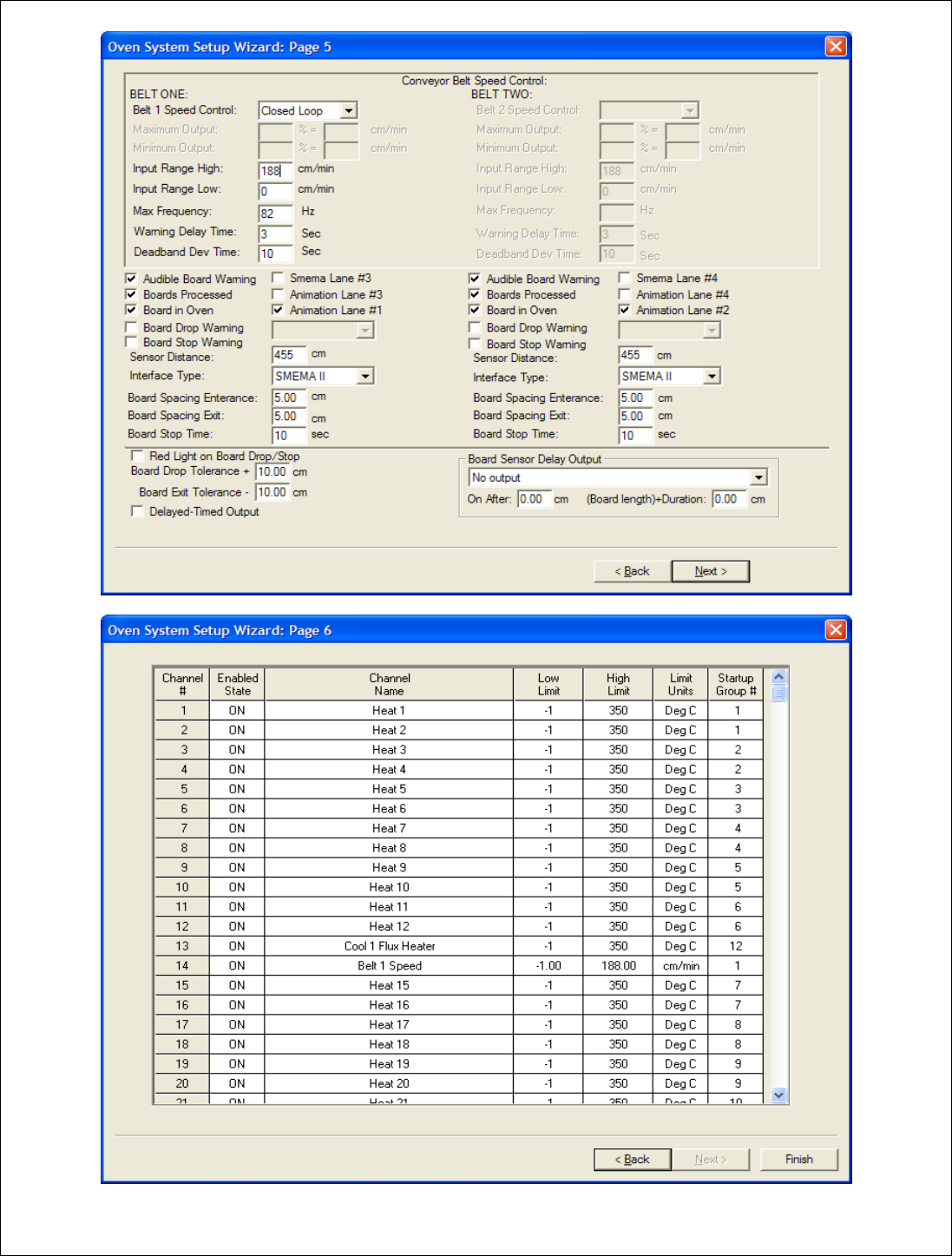
可移动轨道和轨道配置:(计算机控制轨道)
第一个计算机控制轨道宽度
控制类型:自动
第三个计算机控制轨道宽度
控制类型:自动
滑行偏移:____厘米
零点方向
滑行偏移:____厘米
零点方向
备用距离:____厘米
捕捉零点方向
备用距离:____厘米
捕捉零点方向
零点距离:_____厘米
行程距离:_____最小 ______最大
每厘米脉冲: 1576
容差 +_____ -_____ 厘米
最大重试次数: _____
零点距离:_____厘米
行程距离:_____最小 ______最大
每厘米脉冲: 1576
容差 +_____ -_____ 厘米
最大重试次数: _____
第二个计算机控制轨道宽度
控制类型:自动
第四个计算机控制轨道宽度
控制类型:自动
滑行偏移:____厘米
零点方向
滑行偏移:____厘米
零点方向
备用距离:____厘米
捕捉零点方向
备用距离:____厘米
捕捉零点方向
零点距离:_____厘米
行程距离:_____最小 ______最大
每厘米脉冲: 1576
容差 +_____ -_____ 厘米
最大重试次数: _____
零点距离:_____厘米
行程距离:_____最小 ______最大
每厘米脉冲: 1576
容差 +_____ -_____ 厘米
最大重试次数: _____
手动(硬件)轨道控制
轨道启动组: ______
轨道训练功能
第二中心板支撑带轨道训练: ________________
(轨道驱动电动机设定电压:EXL 型 48V 至 53V,SX 型 28V 至 33V)
(对单可调节轨道,选择第一个计算机控制轨道宽度,对双调节轨道,选择第一和第二个计算机控制轨道宽度,
对带中心板支撑的单壳调节轨道,为中心板支撑选择第一个轨道宽度,为可调节轨道选择第二个轨道宽度)