00195755-0102_UM_D1_D2_SR605_ZF.pdf - 第124页
3 取置機的技術資料 用戶手冊 SIPLAC E D1/D2 3.7 懸臂系統 源自軟體版本 SR.605.xx 07/2008 英文版 124 3.7.3 X 軸的技術資料 3 3.7.4 Y 軸的構造 3 圖 3.7 - 3 D2 取置機範例中 Y 軸的構造 驅動裝置 三相交流伺服馬達 / 齒 形皮帶 最大速度 2.5 m/s 移動軌道 470 mm 距離測量系統 金屬直線尺規 測量長度 520 mm 尺規長度 520 mm 解析度…
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.7 懸臂系統
123
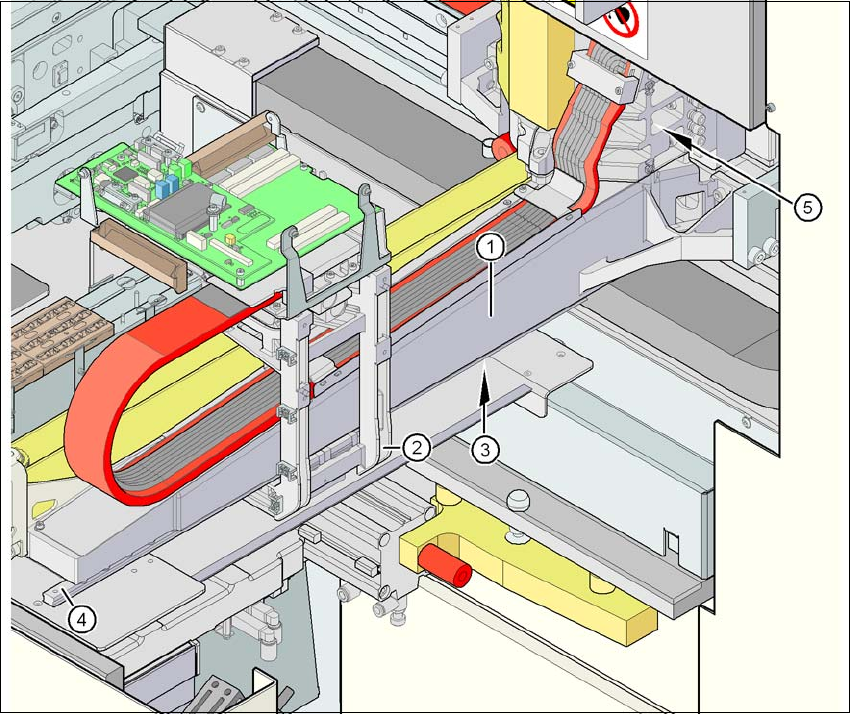
3.7.2 X 軸的構造
3
圖
3.7 - 2 X
軸的構造
X 軸基本上由下列主要模組構成:
–懸臂 (1)
– 取置頭座 (2)
– 線性測量系統 (3)
– 線性測量系統 (4)
– X 軸三相交流伺服馬達 (5)
取置頭座裝有下列元件:
– 副懸臂攝影機 (PCB VISION 模組攝影機)
– 取置頭板
–用於 X 軸測量系統的測量頭
– 收取置放頭 (SIPLACE D2)
– 收取置放頭和拾取置放頭 (SIPLACE D1)
3 取置機的技術資料 用戶手冊 SIPLACE D1/D2
3.7 懸臂系統 源自軟體版本 SR.605.xx 07/2008 英文版
124
3.7.3 X 軸的技術資料
3
3.7.4 Y 軸的構造
3
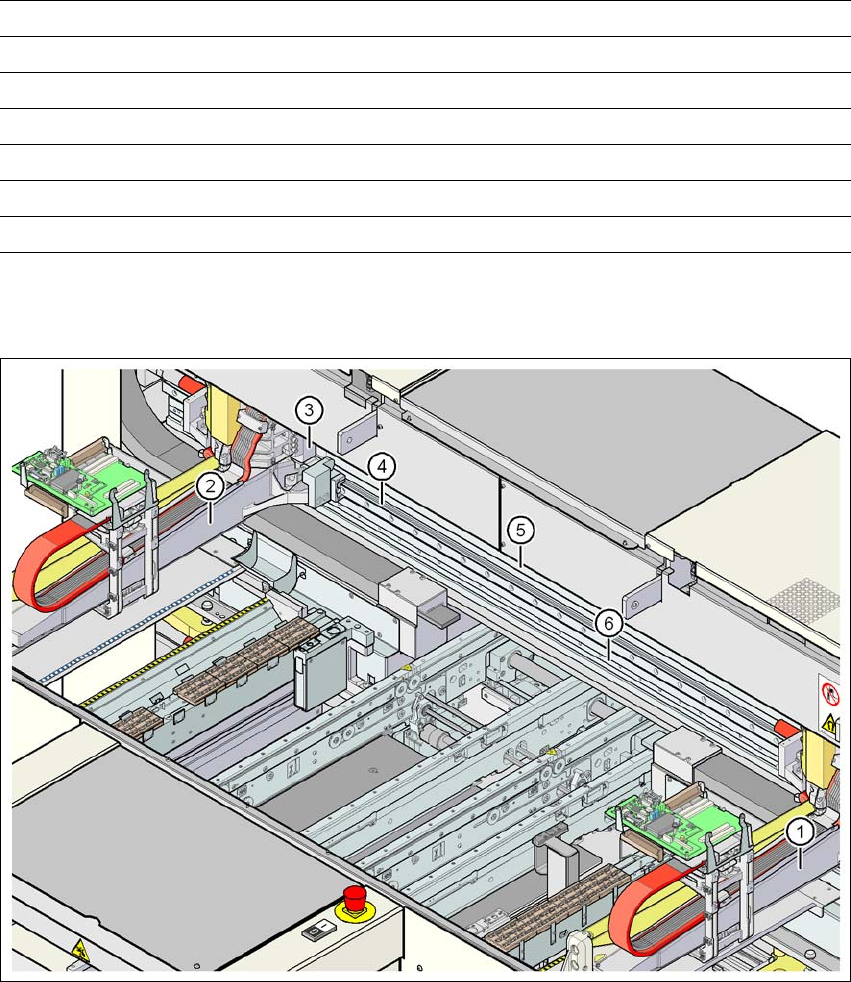
圖
3.7 - 3 D2
取置機範例中
Y
軸的構造
驅動裝置 三相交流伺服馬達 / 齒形皮帶
最大速度
2.5 m/s
移動軌道
470 mm
距離測量系統 金屬直線尺規
測量長度
520 mm
尺規長度
520 mm
解析度
1 μm
(1) 懸臂 1 (SIPLACE D1/D2) (4) 導軌系統
(2) 懸臂 2 (SIPLACE D2) (5) 永久磁鐵
(3) 轉接板 (6) 測量系統
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.7 懸臂系統
125
Y 軸基本上由下列主要模組構成 :
– 含永久磁鐵 (圖 3.7 - 3
中的第 5 項,第 124 頁) 和轉接板 (圖 3.7 - 3 中的第 3 項,第
124
頁) 的 Y 軸線性驅動裝置
– Y 軸導軌系統 (圖 3.7 - 3
中的第 4 項,第 124 頁)
– Y 軸測量系統 (圖 3.7 - 3
中的第 6 項,第 124 頁)
Y 軸由線性馬達驅動。第二部份的驅動是由安裝在機架上的永久磁鐵所產生的。第一部分用螺栓
固定在懸臂 (轉接板) 上。防撞迴路防止懸臂的移動路徑相交。
3.7.5 Y 軸的技術資料
驅動裝置 直流驅動、線性馬達
速度 最大 2.5 m/s
懸臂的移動軌道, SIPLACE D1
懸臂 1: 從取置機的中心位置到料位 1
懸臂 1: 從取置機的中心位置到料位 2
+ 778 mm
- 801 mm
懸臂的移動軌道, SIPLACE D2
懸臂 1: 從取置機的中心位置到料位 1
懸臂 2: 從取置機的中心位置到料位 2
+ 795 mm
+ 677 mm
距離測量系統 金屬直線尺規
尺規長度
1950 mm
解析度
1 μm