00195755-0102_UM_D1_D2_SR605_ZF.pdf - 第128页
3 取置機的技術資料 用戶手冊 SIPLAC E D1/D2 3.8 PCB 輸送帶系統 源自軟體版本 SR.605.xx 07/2008 英文版 128 電路板輸送帶的寬度透過一個積體 控制迴路進行設定及監 控。它可以叫出程式來進行選取。 控制 迴路接著會驅動步進馬達, 直到它達到想要的寬度為止。因此寬 度調整不會影響其他 機器部件。 輸送高度可以修改, 藉此讓取置機可以整合到 輸送高度分別為 830 、 900 、 930 或 95…
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.8 PCB 輸送帶系統
127
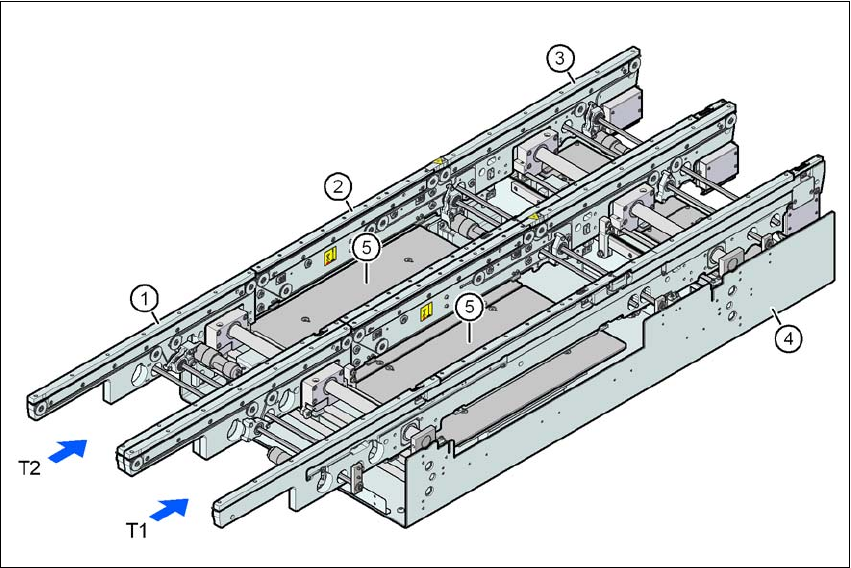
3.8.1.2 彈性 PCB 雙輸送帶的構造
彈性雙輸送帶具有兩個輸送料軌,他們在電氣上與機械上都是獨立的。
3
圖
3.8 - 2 PCB
雙輸送帶的構造
(1) 輸入輸送帶
(2) 處理輸送帶
(3) 輸出輸送帶
(4) 裝配料盤
(5) 升降台
T1 輸送帶 1
T2 輸送帶 2
3.8.2 說明
在進行取置時,PCB 是由下方夾置的。因此每個 PCB 在 PCB 頂端與取置頭之間的距離可以保持
不變,不受 PCB 厚度影響。取置速度也與 PCB 的厚度無關。 PCB 定位基準點定位也可以達到最
佳化。由於 PCB 表面與 PCB 攝影機之間的距離保持一定, PCB 攝影機可以一直聚焦在 PCB 的
表面而得到相同的清晰度。PCB 定位基準點的外形以最佳的方式對應在 PCB 攝影機的 CCD 晶片
上。

3 取置機的技術資料 用戶手冊 SIPLACE D1/D2
3.8 PCB 輸送帶系統 源自軟體版本 SR.605.xx 07/2008 英文版
128
電路板輸送帶的寬度透過一個積體控制迴路進行設定及監控。它可以叫出程式來進行選取。控制
迴路接著會驅動步進馬達,直到它達到想要的寬度為止。因此寬度調整不會影響其他機器部件。
輸送高度可以修改,藉此讓取置機可以整合到輸送高度分別為 830、900、930 或 950 mm 的生產
線上。
PCB 輸送帶會透過 SMEMA 介面或選購的 SIEMENS 介面與其他取置機逐一進行通訊。
雙輸送帶或單輸送帶的輸送帶固定邊都可以定為左側或右側。透過此輸送帶,固定側可方便地左
右換邊。
電路板輸送帶以光學感應器進行監控及控制。如果電路板到達取置區並通過光柵,輸送帶會停
止。有一個雷射光柵會測定電路板的位置。當電路板到達目標位置後,輸送帶會停止移動而電路
板會從下方被夾緊。
3.8.3 輸送帶和輸送模式的定義
右側輸送料軌 (從輸送方向看) 稱為 「輸送帶 1」,左側的輸送料軌稱為 「輸送帶 2」 (參見第
3.8 - 4
,第 130 頁)。
3.8.3.1 輸送料軌寬度的界定
3.8.3.2 標準寬度
輸送料軌的標準寬度為定義輸送帶固定側位置所需的最大輸送帶寬度。每個料軌不可以超過 216
mm。
3.8.3.3 超寬的輸送料軌
將輸送帶固定側移出正常位置,即可將輸送料軌寬度最大增至 242 mm。
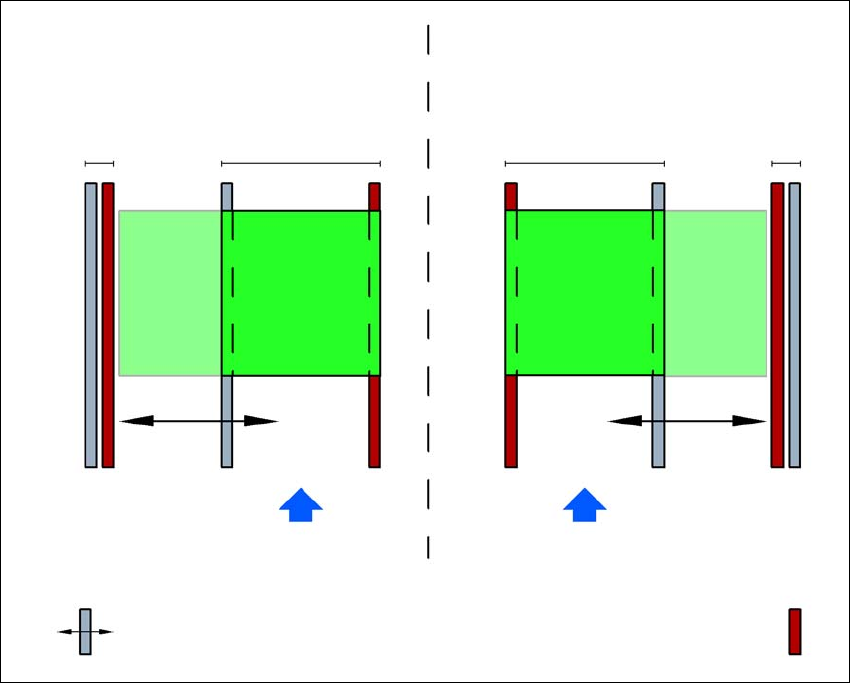
3.8.3.4 單輸送帶模式下的雙輸送帶
雙輸送帶可以在線上架構成單輸送帶。欲達此目的,須將其中一個輸送料軌移動至完全在一起,
並取消作用 (參見第 3.8 - 3
,第 129 頁)。如此可將一個輸送料軌的寬度增加到 380 mm。
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.8 PCB 輸送帶系統
129
3
圖
3.8 - 3
單輸送帶模式下的彈性雙輸送帶
3.8.3.5 輸送模式
彈性雙輸送含兩種模式可以使用:
– 同步輸送模式
– 非同步輸送模式
3.8.3.6 非同步輸送模式
說明 3
在非同步模式下,只有在一個輸送軌道上的 PCB 會進行處理。同時,第二輸送料軌上的另一個
PCB 則移動進入取置位置。如此可以節省一個 PCB 的全部輸送時間,大幅提昇效能,特別是週
期時間較短的 PCB。
一旦機器接收到工作資料 (面板、設定),送料輸送帶上的 PCB 會持續被輸送到可用的處理輸送
帶上 (該處理輸送帶必須為閒置狀態) 進行取置作業。 PCB 被送入相關的處理輸送帶上後,立
即展開取置程序。 PCB 是依次進行處理的。
具有加寬輸送料軌 2
(輸送帶固定側在左) 的雙輸送帶
輸送料軌 2
取消作用
輸送料軌 1 輸送料軌 2 輸送料軌 1
取消作用
PCB 輸送方向 PCB 輸送方向
輸送帶固定側
具有加寬輸送料軌 1
(輸送帶固定側在右) 的雙輸送帶
可移動式輸送帶側璧