西门子技术培训资料TX等糸例.pdf - 第41页
4 悬臂系统 4.2 回参考点 技术培训 SIPLACE TX系列 10/2016 41 4.2 回参考点 贴片机启动后按下 Start(启动)按钮后,轴移到定义位置。这被称为回参考点。 回参考点流程 回参考点详细流程 前提条件:对于相关贴片头,轴回参考点必须成功完成。 初次回参考点过程中,对三相交流驱动装置进行换相同时进行位置搜索以确定轴的运动方向: 1. MGCU 切换两个电机相。 2. 三相交流电机移到下个适当的磁性位置。 3. …
4 悬臂系统
4.1 概览
40 技术培训 SIPLACE TX系列 10/2016
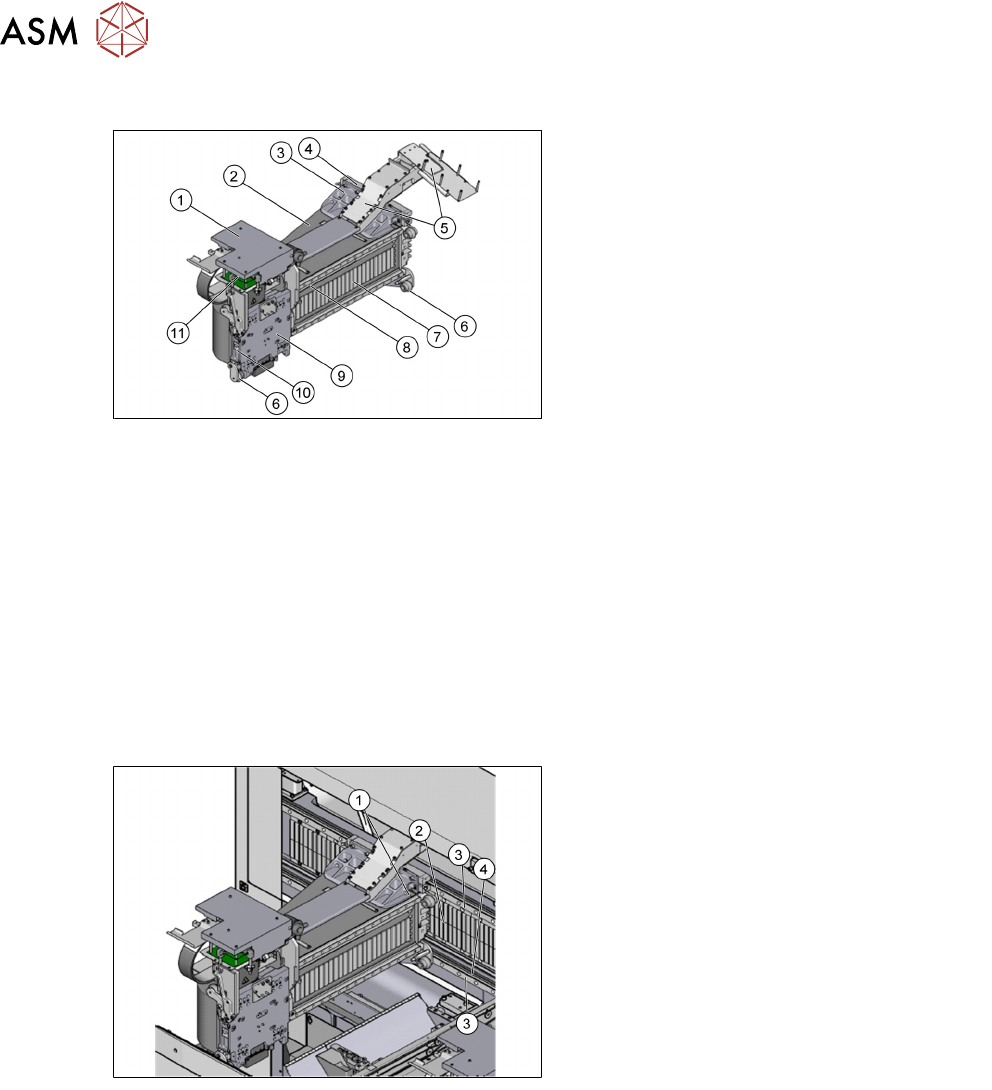
X轴机械结构
1. 电路板(头板、影像板和垂直安装的适配
板)
2. 悬臂,采用碳纤维制成
3. Y 轴传感器模块*
4. Y 轴线性电机(主要)
5. 扁平电缆(线)
6. X 轴末端缓冲块
7. 次要部分 X 轴(磁铁)
8. 增量型标尺/玻璃标尺*
9. 贴片头安装板,带 X 轴线性电机的集成主
要部分
10. 温度传感器
11. X 轴传感器模块(贴片头板下方)
*仅适用于 TX micron
温度传感器可补偿机器的校准数据以提高贴片准确度。
Y轴机械结构
1. X 轴悬臂上的 Y 轴线性电机(主要部分)
2. 永磁体(Y 轴线性电机的次要部分)
3. 线性导向系统
4. 增量型标尺/玻璃标尺*
*仅适用于 TX micron
4 悬臂系统
4.2 回参考点
技术培训 SIPLACE TX系列 10/2016 41
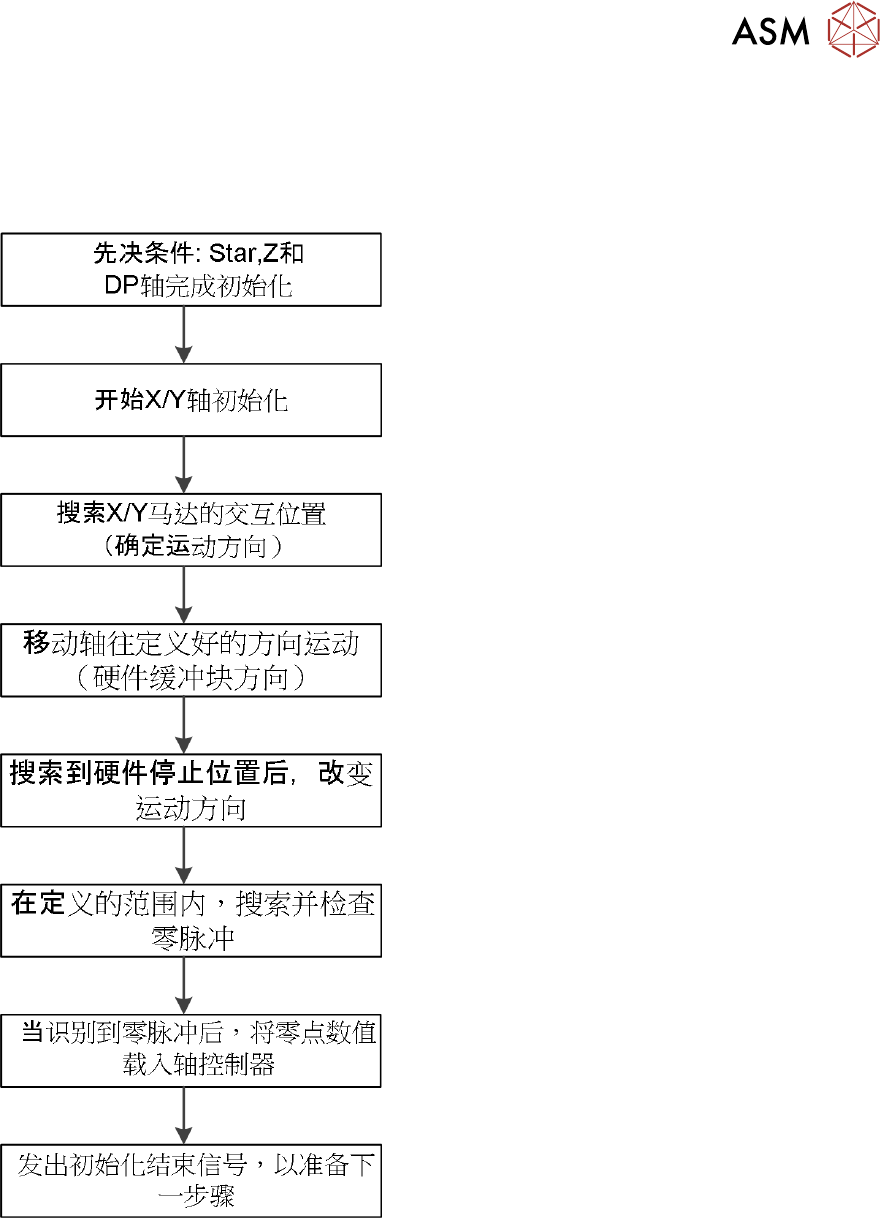
4.2 回参考点
贴片机启动后按下 Start(启动)按钮后,轴移到定义位置。这被称为回参考点。
回参考点流程
回参考点详细流程
前提条件:对于相关贴片头,轴回参考点必须成功完成。
初次回参考点过程中,对三相交流驱动装置进行换相同时进行位置搜索以确定轴的运动方向:
1. MGCU 切换两个电机相。
2. 三相交流电机移到下个适当的磁性位置。
3. 电源切换两个其他电机相,轴继续移动。
4. 重复执行这些开关步骤数次。
5. 轴回参考点继续,参考位置搜索位置测量系统。
4 悬臂系统
4.2 回参考点
42 技术培训 SIPLACE TX系列 10/2016
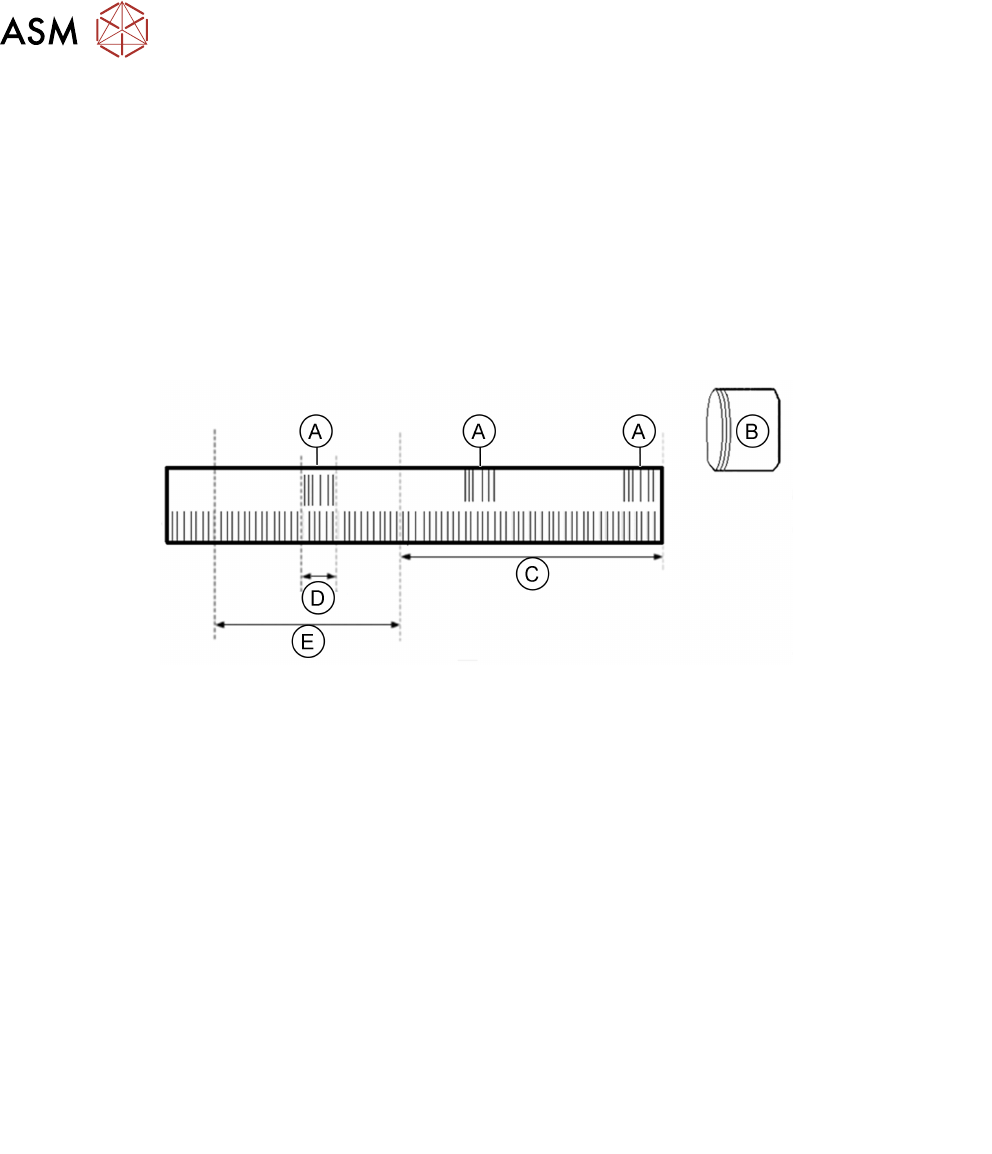
到达 HW 末端位置,更换驱动方向并查找零脉冲
轴运动方向已经确定,但控制系统认为电机处于未知位置。
1. 借助缓冲器识别(硬件终点挡板),轴渐渐朝着与缓冲器相反的方向移动。为此,固定目标值
由逐渐靠近机械终点挡板的轴控制器设置。
2. 一定时间后,轴会到达这种状态,即不再会到达设定的目标位置(实际位置不等于目标位
置),轴位于硬件终点挡板(缓冲器)。
3. 在经过一定时间(大约 10m)并到达一定电机电流后,行进方向将会反转并且轴会在特定范
围内搜索零脉冲。此时电机进行定位控制。
A
B
C
D
E
零脉冲
缓冲器
没有可配置的零脉冲搜索区域
检查正确零脉冲的区域
可配置的零脉冲搜索区域
4. 距离缓冲器一定距离(约 25 mm)会禁止搜索零脉冲。
5. 移出该禁止区域后,开始搜索。如果在该区域发现零脉冲,则在距离大约 2.5 mm 的区域内搜
索更多脉冲。如果只找到一个零脉冲,则会出现结束位置信息,回参考点就此完成。
6. 出现故障(特定区域内出现多个零脉冲或没有零脉冲)后,轴将停止运行并发送一条错误信
息。
7. 轴现在位于定义位置。查找和检查零脉冲后,会载入零点校正值。
8. 主轴的回参考点现已完成。
9. 真空和高度回参考点将会开始。
主轴回参考点在所有悬臂上同时开始。
TX micron 悬臂差异
●
X/Y 轴玻璃标尺热稳定 Robax 标尺(微晶玻璃复合材料),用于悬臂系统,最高分辨率为
10nm。
●
编码器插值 20um
– X 轴编码器 TXm MS30
– Y 轴编码器 TXm MS30
●
X 轴上安装的两个传感器模块,用于将 X 轴和 Y 轴模拟跟踪信号转换为数字信号。