YAMAHA元件识别要点.pdf - 第18页
Y amaha Mounter 识别体系、识别理论讲解及技巧培训 第十八页 Made by: Jeff Joe (WKK) 12. Q F P [IC Grou p] 1) Y amaha 文献说明 YVOSX VIOS Dictionary 文献说 明 : 首先元件的本体 依照 Ruler Off set ( 边界深度 ) 的 规则从东方向被检 测到 然后元件的本体 依照 Ruler Off set ( 边界深度 ) 的 规则…
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第十七页 Made by: Jeff Joe (WKK)
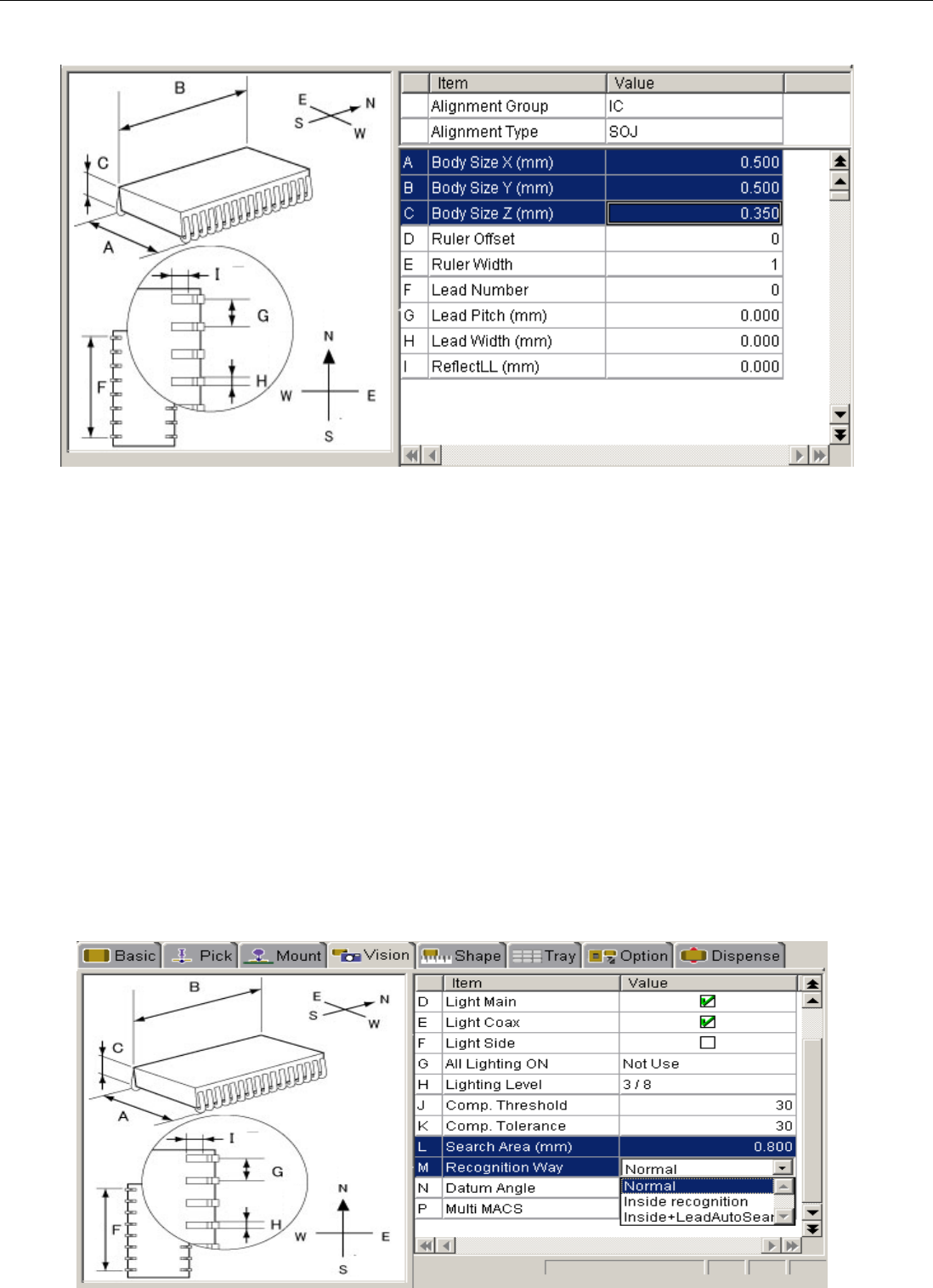
11. SOJ [IC Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从东方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则从西方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
这种方式基本等同于 SOP 方式, 但它不允许管脚的"Co-Planarity"平整度被检测(选件)
Yamaha XG SERIES Operation Manual 文献说明:
这种方式针对的是有 E 同 W 极相同管脚类型、相同管脚数量的物料类型, 基本等同于 SOP, 但管脚不是
由物料本体向外伸出(向内弯进)
2) 中文描述此识别类型特点
主要针对双边对称引脚内弯型芯片
对管脚的一致性要求没有 SOP 高
3) 识别类型技巧
SOJ 及之后的 PLCC 识别方式需注意 Recognition Way 的项目, 默认的 Normal 方式是以引脚外界为顶点,
如需以内方向为顶点基础请更改此项目
不同尺寸、管脚数量、管脚间距的芯片对 Nozzle Tyep、Pick Speed、Mount Speed、Pick&Mount Action 等
项目均不同, 使用时需对应
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第十八页 Made by: Jeff Joe (WKK)
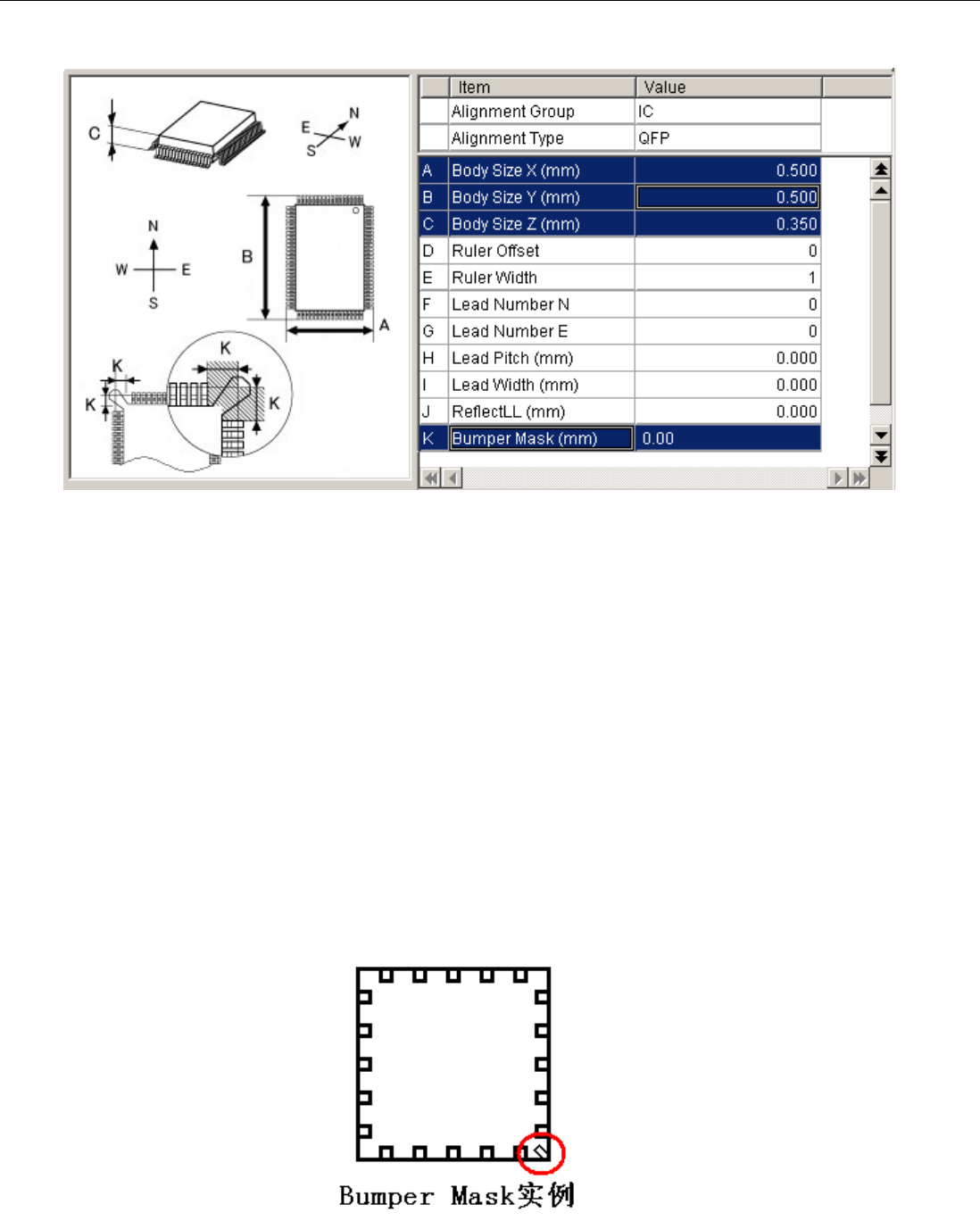
12. QFP [IC Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从东方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则依次从北, 西, 南方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
四个方向的引脚类型必须相同
这种方式允许管脚的"Co-Planarity"平整度被检测(选件)
Yamaha XG SERIES Operation Manual 文献说明:
这种方式针对的是有 N、S、E、W 极相同管脚类型, 对边方向拥有相同管脚数量的物料类型(N 与 S 一组,
E 与 W 另一组), 但管脚是由物料本体向外伸出
2) 中文描述此识别类型特点
主要针对四边引脚,对边对称型芯片
管脚的一致性要求高
3) 识别类型技巧
注意 QFP方式的 Bumper Mask不能乱用, 通常不使用, 不正常的使用会导致识别异常. 实例中有一种无引
脚、角落会有一方向点的元件会用到此功能
管脚要求较高, 如出现氧化管脚发黑现象, 考虑更改识别类型为 Connector 方式
不同尺寸、管脚数量、管脚间距的芯片对 Nozzle Tyep、Pick Speed、Mount Speed、Pick&Mount Action 等
项目均不同, 使用时需对应
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第十九页 Made by: Jeff Joe (WKK)
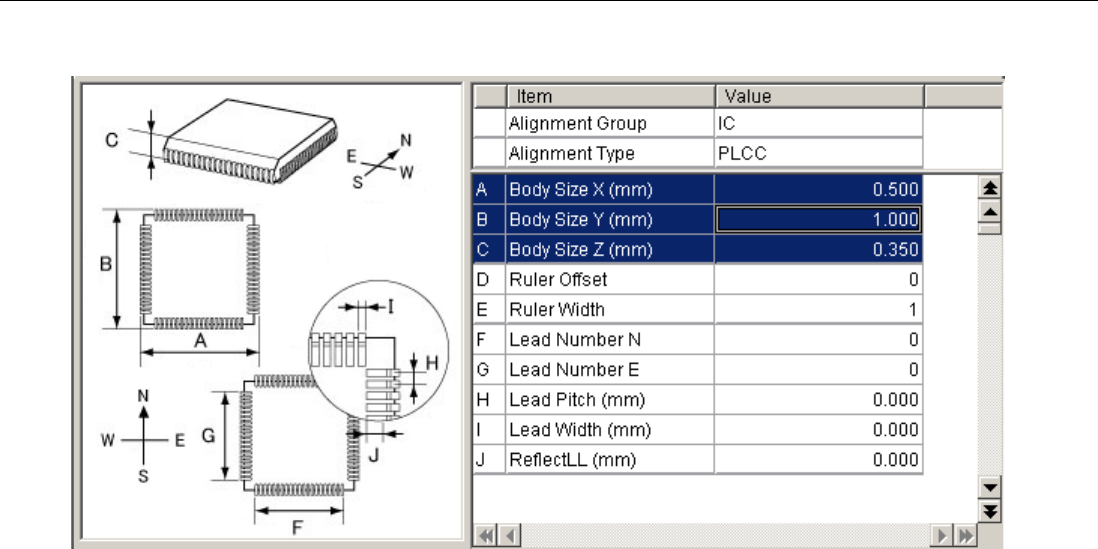
13. PLCC [IC Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从东方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则依次从北, 西, 南方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
四个方向的引脚类型必须相同
Yamaha XG SERIES Operation Manual 文献说明:
这种方式针对的是有 N、S、E、W 极相同管脚类型, 对边方向拥有相同管脚数量的物料类型(N 与 S 一组,
E 与 W 另一组), 基本类同于 QFP, 但管脚不是由物料本体向外伸出(向内弯进)
2) 中文描述此识别类型特点
主要针对四边引脚,对边对称,引脚内弯型芯片
管脚的一致性要求不如 QFP 高
3) 识别类型技巧
PLCC 及之前的 SOJ 识别方式需注意 Recognition Way 的项目, 默认的 Normal 方式是以引脚外界为顶点,
如需以内方向为顶点基础请更改此项目. 功能图示请参看 SOJ.
注意 PLCC 无 Bumper Mask 功能, 故 QFP 实例中的图示只能使用 QFP 识别方式, 而不能使用 PLCC