YAMAHA元件识别要点.pdf - 第7页
Y amaha Mounter 识别体系、识别理论讲解及技巧培训 第七页 Made by: Jeff Joe (WKK) 三 . 识别类型的详述 1. St d.Chip [Chip G roup] 1) Y amaha 文献说明 YVOSX VIOS Dictionary 文献说 明 : 首先元件的本体 依照 Ruler Off set ( 边界深度 ) 的 规则从北方向被检 测到 然后元件的本体 依照 Ruler Off s…

Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第六页 Made by: Jeff Joe (WKK)
提醒: 设备调整也好, 程序调整也好, 都会有很多方式同时会有很多种结果, 但一定会有一个是使用者需要的. 而
且结果也一定是一个折中的结果. “不可能只有优点没有缺点”
2. 识别类型的相互关系:
识别类型的分类有设备本身的分组方法; 还有一种是依据 Lead 的识别状况分类的方法. 依据 Lead 的分类方法的
细节为:
两只管脚型: Std.Chip, Melf Chip, Bare.Chip, Sp.Chip, Small Chip, 2Ends, Odd.Chip
多只管脚型: Mini-Tr/SOT, P-Tr, SOP, SOJ, QFP, PLCC, OffLead, Con-E, Con-NSEW, Odd.Con, Special
球型管脚型: Simple BGA, BGA, Simple FlipChip, FlipChip
非管脚型: Cylinder, AsMark, Sp.Quad, Gravity, Ignore
说明: 依据管脚 Lead 分类的方法的同种类型可认为是可以相互转换的 (相互转换可以认为是标准化的基础), 比
如下面的实例---
1) 片状元件(两只管脚)的识别类型对应上面的”两只管脚型”的任一种都可以, 不同只是个别参数上(或动作上)的
差异, 单独考虑识别的时候是一样的
2) 多管脚异形元件识别信息的制作, 通常先选择最接近其形状的管脚识别类型, 然后再将识别类型更改为复杂
的”多管脚类型” (由简单更改到复杂, 可减少项目的输入, 减少错误几率). 比如我们要将一个类似QFP的无引
脚 IC 变更为 Special 类型, 首先使用 QFP 模式将引脚的基本信息输入, 再变更识别类型为 Special, 这时引脚
的参数已经存在, 编制者只需略调整个别参数即完成元件制作.
3) 对一些简单的多管脚元件, 可以选择多种识别方案. 比如四边有管脚可选 QFP, PLCC, OFFLead, Con-NSEW,
Special; 两边有管脚可选 Mini-Tr/SOT, SOP, SOJ. (同时对两边管脚也可选四边管脚的类型, 设定两边为零即
可)
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第七页 Made by: Jeff Joe (WKK)
三. 识别类型的详述
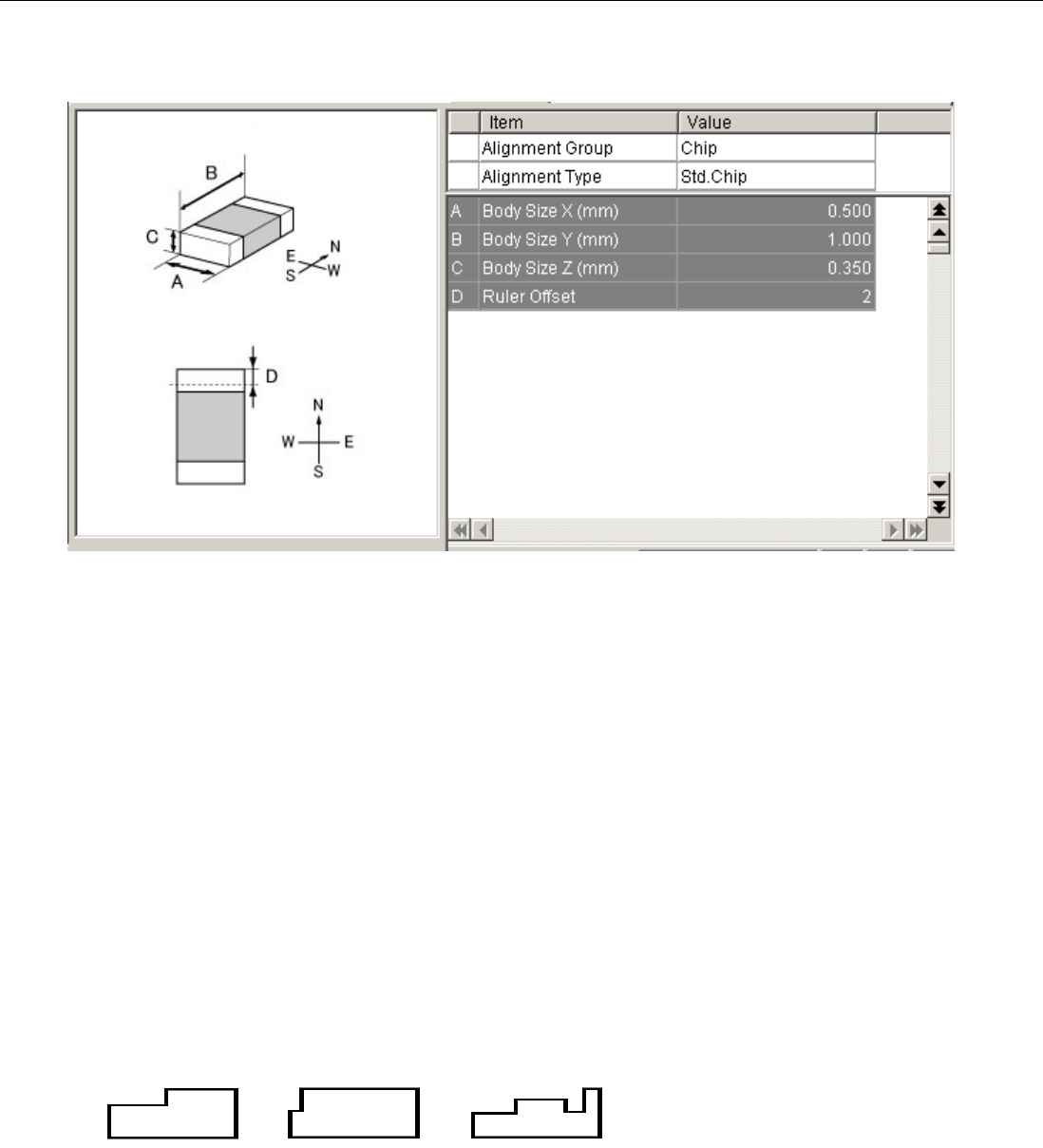
1. Std.Chip [Chip Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从北方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则从南方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
Yamaha XG SERIES Operation Manual 文献说明:
这个识别方式不确定元件(解释: 应该为准确形状), 但检测元件的四个边角(解释: 顶点论)和计算出元件
的中心以及角度. 使用这个识别方式的元件应为方形盒状元件. 如果元件无法被这种识别方式识别, 请试
验使用”Sp.Chip”或”Small Chip”
2) 中文描述此识别类型特点
识别符合”顶点论”, 由四个边角计算中心及角度
对形状要求不严, 尤其对应边角为弧形形状的元件依然可以识别通过, 所以实践会感觉此种识别类型的
精度不高. (但其实识别的精度是由元件来确定的, 跟识别方式关系不大)
无须设定管脚的宽度(Lead Width)及反光长度(ReflectLL), 反光长度由边角深度(Ruler Offset)确定
3) 识别类型技巧
由”Std.Chip 的识别要求很低”及”物料识别的中心及角度是边角决定”, 这种识别方式可以用在某些边角明
确本体异形的元件上, 比如: 一些简单形状的屏蔽罩(Sp.Quad 识别不稳定)
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第八页 Made by: Jeff Joe (WKK)
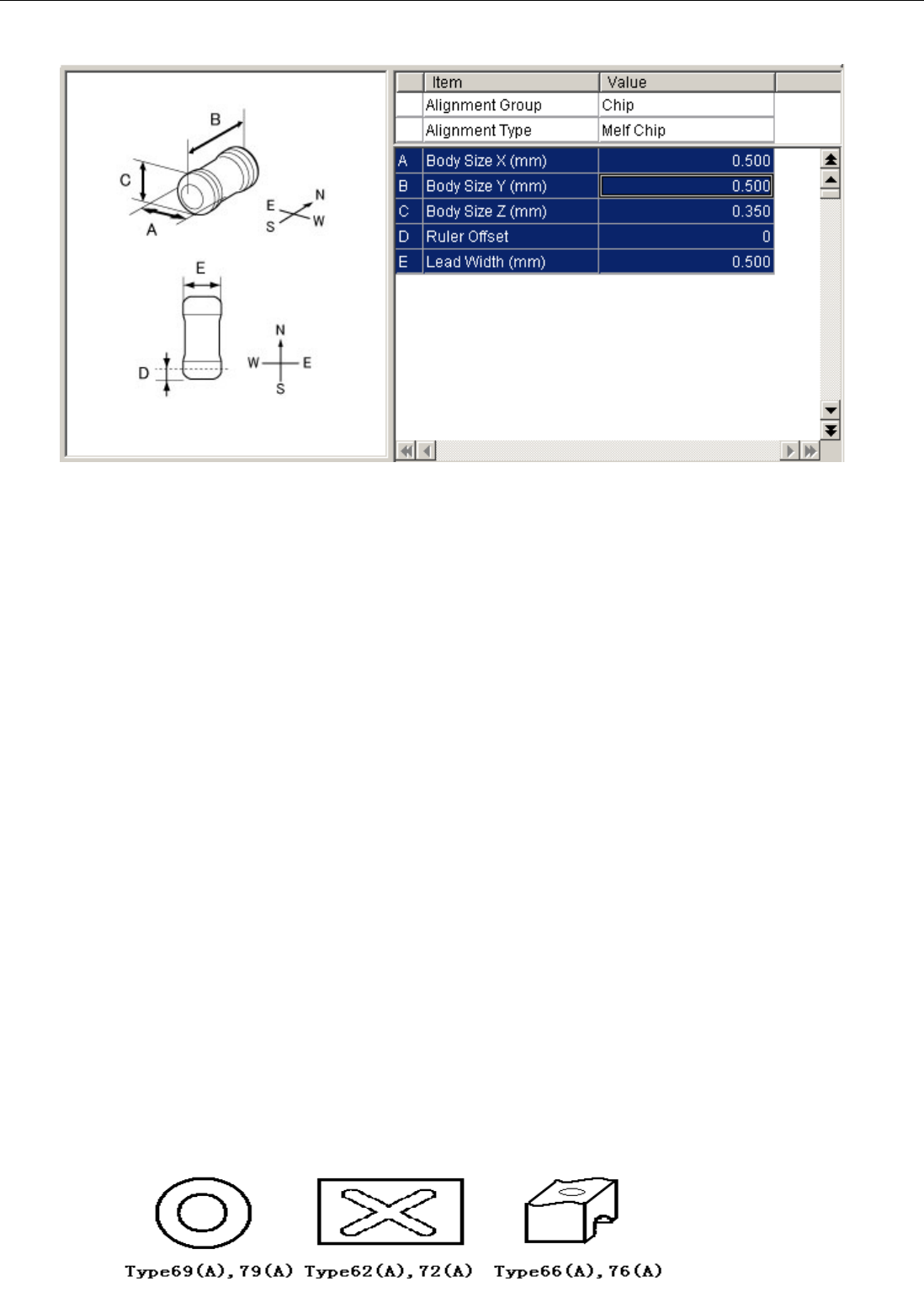
2. Melf Chip [Chip Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从北方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则从南方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
此种识别类型(Melf Chip)同 Std.Chip 的区别在于 Lead Width(管脚宽度)需要被正确输入
Yamaha XG SERIES Operation Manual 文献说明:
这种识别方式针对 Melf 型元件(圆柱型片状元件)
2) 中文描述此识别类型特点
此种元件在识别的方面同 Std.Chip 基本是一样的, 如果在 Std.Chip 方式中设定 Lead Width 为 Size Y 两种
识别方式就可以认为相同, 具体相同特点参看 Std.Chip
Melf Chip 同其它类型真正的不同是在于除识别的其它方面, Pick Speed(拾取速度), Pick Timer(拾取时间),
Mount Speed(贴装速度), Mount Timer(贴装时间), Require Nozzle(吸嘴类型)等项目
3) 识别类型技巧
从此种类型开始描述中增加了”同某某类型相同或基本相同或类似”的说法, 这里要强调所谓的相同、相似
只是针对理解方面, 并不代表就可以混用. 应该说每种元件都有最适合的识别类型, 我们可以认为”最适
合的最好, 其它的可以用, 但不一定好用”. 而且这套培训教材是讲解识别方式的, 并不牵扯其它项目, 但
不等于识别类型是孤立的, 尤其对于实际的物料同识别类型建立对应的时候必须全面分析. 象 Melf 元件
的特例是在拾取、贴装, 正确对应 Melf 元件的做法应该是调用 DataBase(标准数据库)当中的 DB
No.520~527, 然后在略更改尺寸及 Lead Width(管脚宽度)、Pick Speed(拾取速度), Pick Timer(拾取时间),
Mount Speed(贴装速度), Mount Timer(贴装时间), Require Nozzle(吸嘴类型)等项目
Melf 元件主要有玻璃二极管、贴片型色环电阻
Melf 元件的吸嘴对应不同的拾取及贴装速度, Type66,76 吸嘴可全速拾取贴装; Type62,72 吸嘴可半速拾取
贴装(50%~80%); Type69,79 能贴装, 但抛料飞件相应会较多
针对 Type69,79 贴装 Melf 元件的要求为: 拾取贴装速度放慢(30%~50%); 拾取位置要设定为 Teaching 或
Relative, 减少取偏蹦飞元件; 适当加大贴装的时间(Mount Timer) (≥0.1s).