YAMAHA元件识别要点.pdf - 第27页
Y amaha Mounter 识别体系、识别理论讲解及技巧培训 第二十七页 Made by: Jeff Joe (WKK) 21. FlipChip [Ball Group] 1) Y amaha 文献说明 YVOSX VIOS Dictionary 文献说 明 : 无此类型说明 Y amaha XG SERI ES Operation Manual 文献 说明 : 这种方式专用 于 FlipChi p ( 复杂倒装芯片 ) …
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第二十六页 Made by: Jeff Joe (WKK)
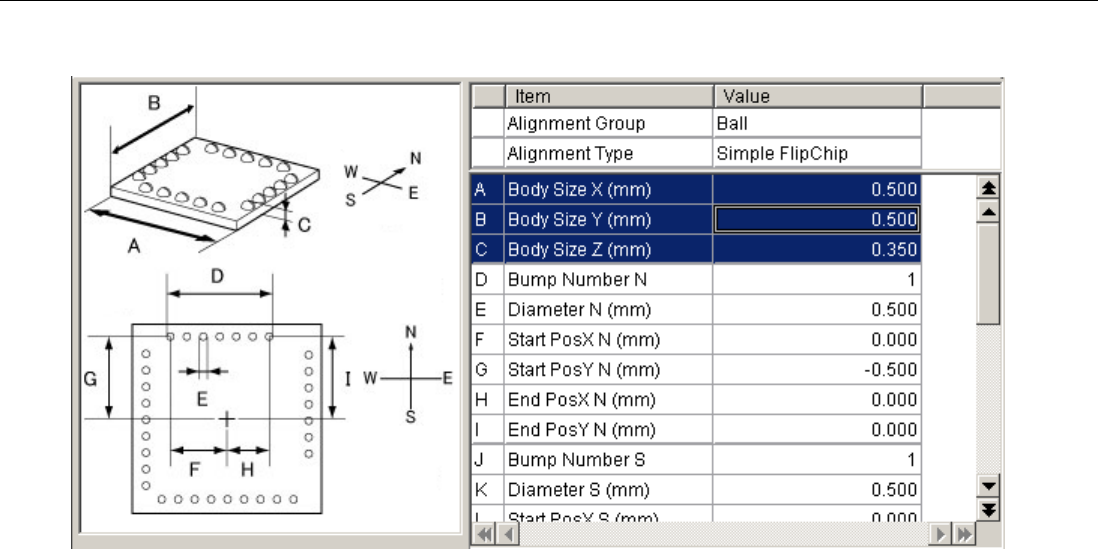
20. Simple FlipChip [Ball Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
无此类型说明
Yamaha XG SERIES Operation Manual 文献说明:
这种方式专用于 FlipChip (简单倒装芯片)元件, Side Light 在识别中被应用.
2) 中文描述此识别类型特点
主要针对 FlipChip (简单倒装芯片)
需输入内容很多, 除球形引脚(或无引脚)的参数, 还需输入起始及终止的坐标位置
注意输入起始及终止的方向, 同 OffLead 方式方向
3) 识别类型技巧
无此类元件经验, 此类元件非常少见(或用于不同行业)
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第二十七页 Made by: Jeff Joe (WKK)
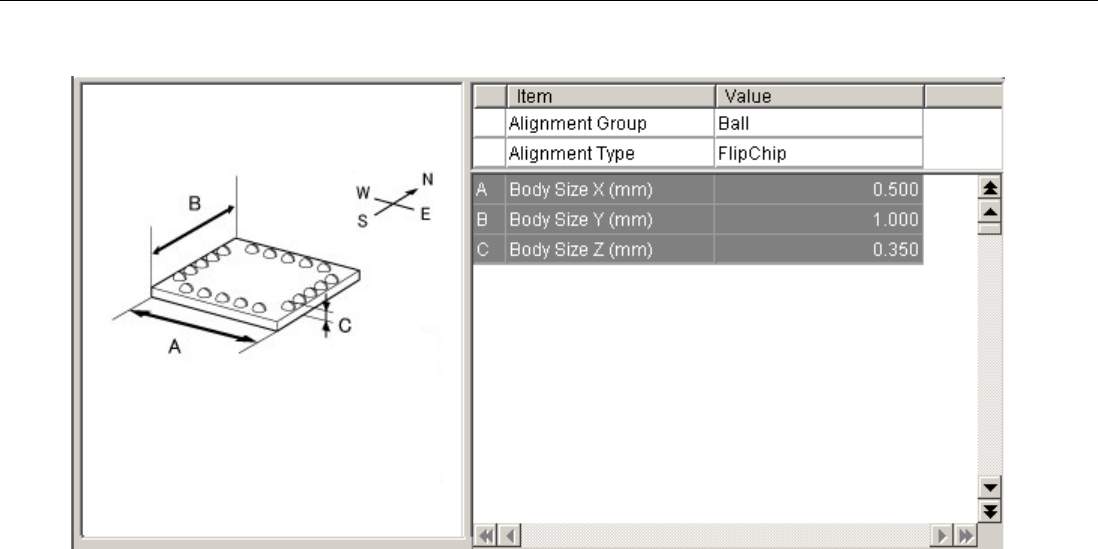
21. FlipChip [Ball Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
无此类型说明
Yamaha XG SERIES Operation Manual 文献说明:
这种方式专用于 FlipChip (复杂倒装芯片)元件.
2) 中文描述此识别类型特点
主要针对 FlipChip (复杂倒装芯片), 即使用 Simple FlipChip 无法识别的元件
需输入内容很少, 可认为基本有本体形状(方向)检测
3) 识别类型技巧
无此类元件经验, 此类元件非常少见(或用于不同行业)
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第二十八页 Made by: Jeff Joe (WKK)
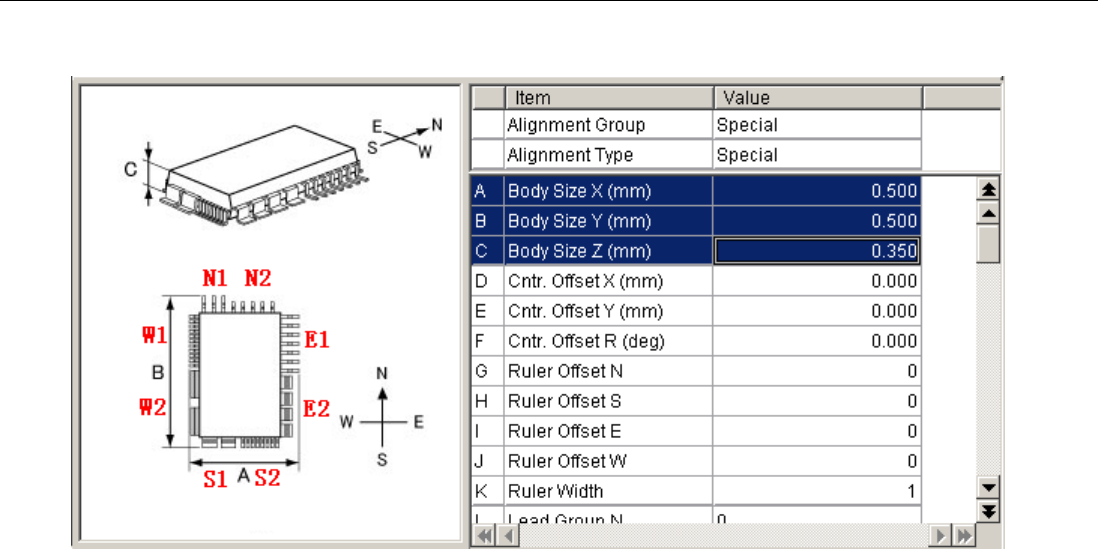
22. Special [Special Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
此方式需要在四个方向(N,S,E,W)上定义独立的管脚类型、数量及管脚间距
注意每个方向上最多可有两组管脚被定义
每组被定义的管脚的起始的位置必须被正确输入
Yamaha XG SERIES Operation Manual 文献说明:
这种方式用于复杂的管脚类型芯片, 即四个方向每个方向最多有两组管脚, 每组管脚的数量、类型、脚间
距均不相同, 且各组管脚无任何对称分布
2) 中文描述此识别类型特点
Special 类型看起来复杂, 其实从这个培训资料延续到这的时候就不应该再认为复杂了, 这种识别方式可
以认为是所有管脚类型的根本, 其它规律型识别类型只不过在某些项目上面特例
需严格注意每个方向的起始组别, 见上面图示
3) 识别类型技巧
编制 Special 一定不能直接就去输入, 很容易错误. 正确的做法应该是: 先调用同所编元件类同的标准库
中的物料, 再将识别方式更改为 Special, 这时可以发现有很多参数已经被输入了, 剩下的任务就是略更改
即可.
N1,N2,S1,S2,E1,E2,W1,W2 一定不能搞错顺序, 否则即使设定图形对应管脚再准确都不会识别通过的