YAMAHA元件识别要点.pdf - 第6页
Y amaha Mounter 识别体系、识别理论讲解及技巧培训 第六页 Made by: Jeff Joe (WKK) 提醒 : 设备调整也好 , 程序调整也好 , 都会有很多方 式同时会有很多种结果 , 但一定会有一个是使用者 需要的 . 而 且结果也一定是 一个折中的结果 . “ 不可能 只有优点没有缺点 ” 2. 识别类型的相互 关系 : 识别类型的分类 有设备本身的分组方 法 ; 还有一种是依据 Lead 的识别状况分类的方 …
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第五页 Made by: Jeff Joe (WKK)
问题 3: 这个问题虽然还未涉及到, 但从实践得出答案为” 对比度不同, 识别得中心会有很小的不相同(从贴
装效果可验证)”. (这个问题涉及到了 ruler offset 得问题, 即在物料(或 IC) 亮度不太暗得条件下, ruler
offset 得值越小越好. Ruler offset 可理解为深度, 设置过大会影响顶点得位置过深入(回到了顶点得问
题), 虽然可认为同时深入对 SOP 或 QFP 没影响(对称), 可现实中并不是顶点同时深入, 只要一个顶点
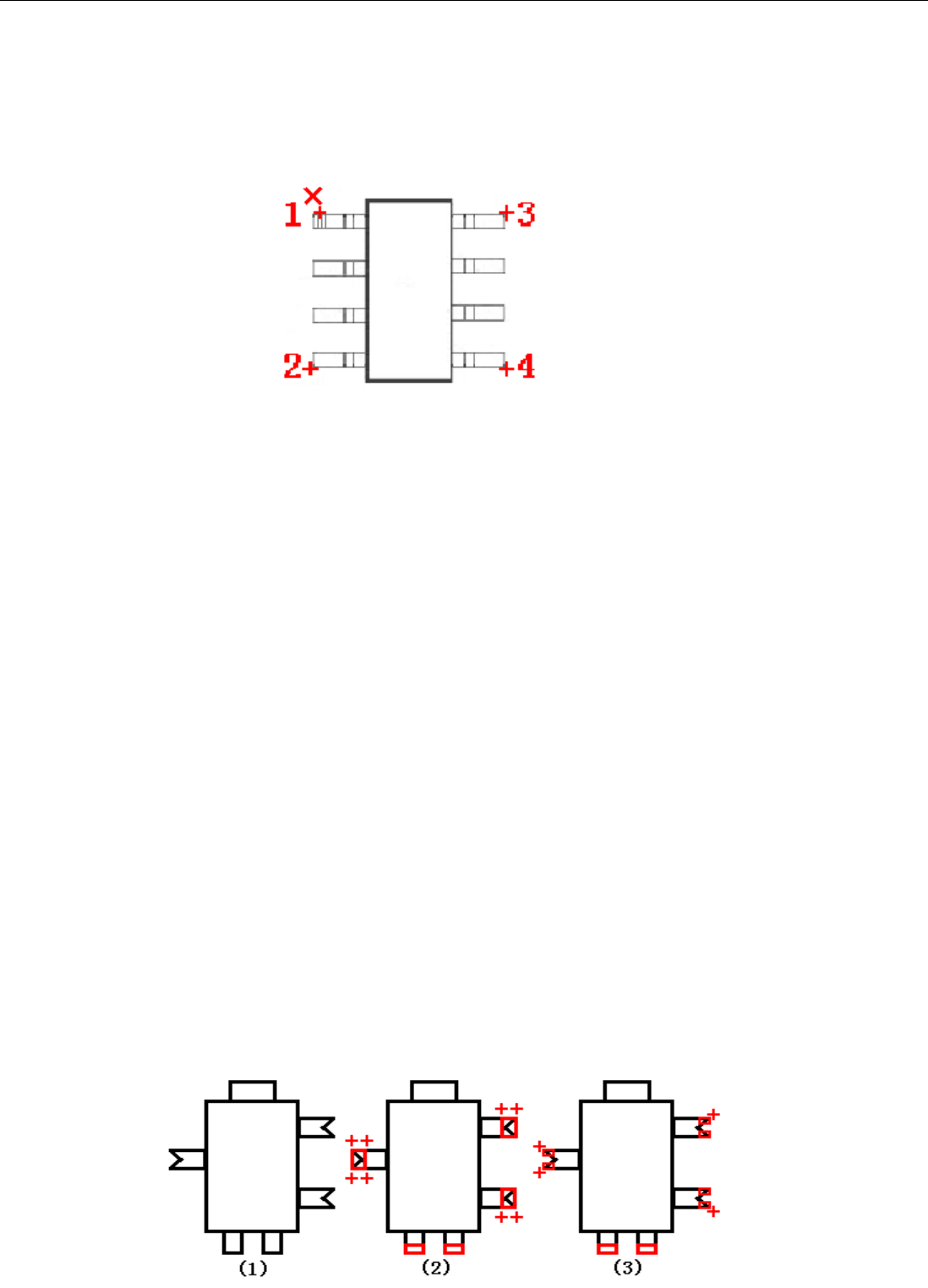
有问题就会产生角度, 如下图中得顶点 1.
注: 由上图还可得到一启示---SOP 为 4 顶点, 比较容易受当中一个得影响, 相比而言 QFP 得 8 个顶点
受得影响就小很多(以概率得角度, 影响的差异是成几何比例)
问题 4: 使用 Connector 的方式识别 SOP 是可行的(实践中对于管脚氧化的 SOP 需更换识别方式), 实践中也证
明中心的识别无差别.
注: Connector同 SOP 差别在于 Vision 的判断上, 即 Connector可以识别的 SOP 方式并不一定可识别.
虽然应该是这样, 现实中的使用者还是感觉 SOP 的方式精度高于 Connector, 产生这种误解是由于
Connector 的方式绝对多数用于排插, 而排插本身的制造精度比较差, 必然识别的精度进而贴装精
度低.
重要技巧: 使用 Connector 方式识别 SOP, 多脚时会不识别! 例: SOP-14Pin 错上料为 SOP-16Pin, 识别
不会报错误.
问题 5: 这个问题上面实际已经有涉及了, QFP 参与计算的顶点大过 SOP一倍, 自然精度至少高一倍(准确计算
精度高多少倍还得加上概率方面的内容, 这里就不详表了).
总结: 识别理论关键在于”顶点论”, 内容可分为” 1)Vision 的判断同中心判断严格分开(处理物料问题时要确定是
Vision 还是中心计算不准, 进而对应变更各自的项目); 2)顶点论的顶点准确应该是边角的顶点, 中间的可以认为只参
与 Vision 判断; 3)推导: 排除 Vision 的判断项目, 几乎所有的识别类型均可归为一种, 可以认为 Special/special 是最复
杂的方式, 其它的方式都是遵循某些特例而单列出来的 (这就是统一论, 意味着所有的不同的识别方式产生的问题
都可以放到一起解释); 4)学习顶点论的成效的要求: 不需使用设备试验即可估计出 95%以上的物料是否会出现识别
中心不准确的问题”
实例处理问题: 客户曾出现过被俗称为”青蛙脚”的耳机插座(图内(1)), 客户使用的方式为(图内(2)), 客户的方式在
横向上有多个随机的顶点选择, 结果只有一个”会产生角度偏差”(这个结论是在仅拿到元件就得出了, 事实也证明结
论是对的). 问题的解决就只有一个”将突出的部分当做单独的管脚处理”, 这样贴装就有了足够的保证(只要可以识别
成功就可以准确贴装), 可也带来了其它的问题--- Vision Error 增多;元件库的制造难道大大增加(Special 原只需每边一
组脚, 现在变为两组脚.

Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第六页 Made by: Jeff Joe (WKK)
提醒: 设备调整也好, 程序调整也好, 都会有很多方式同时会有很多种结果, 但一定会有一个是使用者需要的. 而
且结果也一定是一个折中的结果. “不可能只有优点没有缺点”
2. 识别类型的相互关系:
识别类型的分类有设备本身的分组方法; 还有一种是依据 Lead 的识别状况分类的方法. 依据 Lead 的分类方法的
细节为:
两只管脚型: Std.Chip, Melf Chip, Bare.Chip, Sp.Chip, Small Chip, 2Ends, Odd.Chip
多只管脚型: Mini-Tr/SOT, P-Tr, SOP, SOJ, QFP, PLCC, OffLead, Con-E, Con-NSEW, Odd.Con, Special
球型管脚型: Simple BGA, BGA, Simple FlipChip, FlipChip
非管脚型: Cylinder, AsMark, Sp.Quad, Gravity, Ignore
说明: 依据管脚 Lead 分类的方法的同种类型可认为是可以相互转换的 (相互转换可以认为是标准化的基础), 比
如下面的实例---
1) 片状元件(两只管脚)的识别类型对应上面的”两只管脚型”的任一种都可以, 不同只是个别参数上(或动作上)的
差异, 单独考虑识别的时候是一样的
2) 多管脚异形元件识别信息的制作, 通常先选择最接近其形状的管脚识别类型, 然后再将识别类型更改为复杂
的”多管脚类型” (由简单更改到复杂, 可减少项目的输入, 减少错误几率). 比如我们要将一个类似QFP的无引
脚 IC 变更为 Special 类型, 首先使用 QFP 模式将引脚的基本信息输入, 再变更识别类型为 Special, 这时引脚
的参数已经存在, 编制者只需略调整个别参数即完成元件制作.
3) 对一些简单的多管脚元件, 可以选择多种识别方案. 比如四边有管脚可选 QFP, PLCC, OFFLead, Con-NSEW,
Special; 两边有管脚可选 Mini-Tr/SOT, SOP, SOJ. (同时对两边管脚也可选四边管脚的类型, 设定两边为零即
可)
Yamaha Mounter 识别体系、识别理论讲解及技巧培训 第七页 Made by: Jeff Joe (WKK)
三. 识别类型的详述
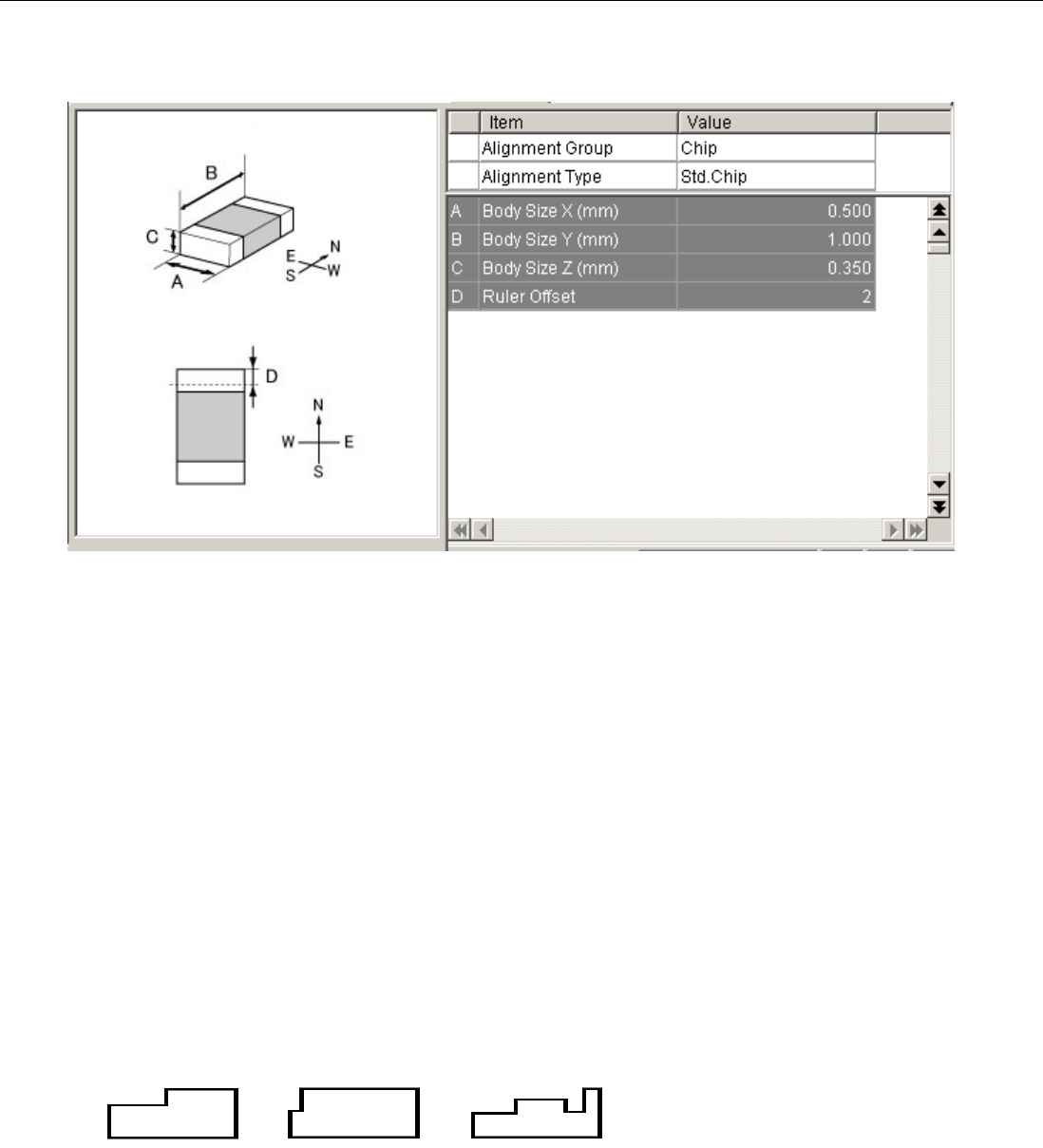
1. Std.Chip [Chip Group]
1) Yamaha 文献说明
YVOSX VIOS Dictionary 文献说明:
首先元件的本体依照 Ruler Offset (边界深度)的规则从北方向被检测到
然后元件的本体依照 Ruler Offset (边界深度)的规则从南方向被检测到
最后元件的形状, 中心, 角度依据检测到的边角被计算得出
Yamaha XG SERIES Operation Manual 文献说明:
这个识别方式不确定元件(解释: 应该为准确形状), 但检测元件的四个边角(解释: 顶点论)和计算出元件
的中心以及角度. 使用这个识别方式的元件应为方形盒状元件. 如果元件无法被这种识别方式识别, 请试
验使用”Sp.Chip”或”Small Chip”
2) 中文描述此识别类型特点
识别符合”顶点论”, 由四个边角计算中心及角度
对形状要求不严, 尤其对应边角为弧形形状的元件依然可以识别通过, 所以实践会感觉此种识别类型的
精度不高. (但其实识别的精度是由元件来确定的, 跟识别方式关系不大)
无须设定管脚的宽度(Lead Width)及反光长度(ReflectLL), 反光长度由边角深度(Ruler Offset)确定
3) 识别类型技巧
由”Std.Chip 的识别要求很低”及”物料识别的中心及角度是边角决定”, 这种识别方式可以用在某些边角明
确本体异形的元件上, 比如: 一些简单形状的屏蔽罩(Sp.Quad 识别不稳定)