SI-F130AI_1st_CS.pdf.pdf - 第172页
操作篇 5. 手动操作 5-2 SI-F130AI 5.1 轴操作 5.1.1 XY 轴的操作 (X ) (Y ) 5.1.2 吸嘴 RN 及 H 轴的操作 RN , H 5.1.3 吸嘴座 RT 轴的操作 (旋转式吸嘴头) 12 RT 5.1.4…
操作篇
5. 手动操作
SI-F130AI
5-1
5. 手动操作
手動操作 ( )
SI-F130AI
5
5.1 轴操作
H RN X Y
RT
5.2 基板搬送操作
5.3 输入 / 输出信号显示
5.4 视觉操作
5.5 零件供给部操作
SI-F130AI
执行错误操作会损害机器
,
操作时要十分注意。
警告 :

操作篇
5. 手动操作
5-2
SI-F130AI
5.1 轴操作
5.1.1 XY 轴的操作
(X ) (Y )
5.1.2 吸嘴 RN 及 H 轴的操作
RN , H
5.1.3 吸嘴座 RT 轴的操作 (旋转式吸嘴头)
12 RT
5.1.4 供料器 (FF,FR)的操作
( : FF : FR )
5.1.5 零件的吸着 (真空)及装着 (吹气)的操作
( ) ( )
5.1.6 轴的伺服操作
操作篇
5. 手动操作
SI-F130AI
5-3
5.1.1 XY 轴的操作
[ 概要 ]
(X ) (Y )
XY
軸
(XY
轴
)
中
X
及
Y
文本框内的值是现在位置 (
12
)。本文框中无法直接输入数值变
更。
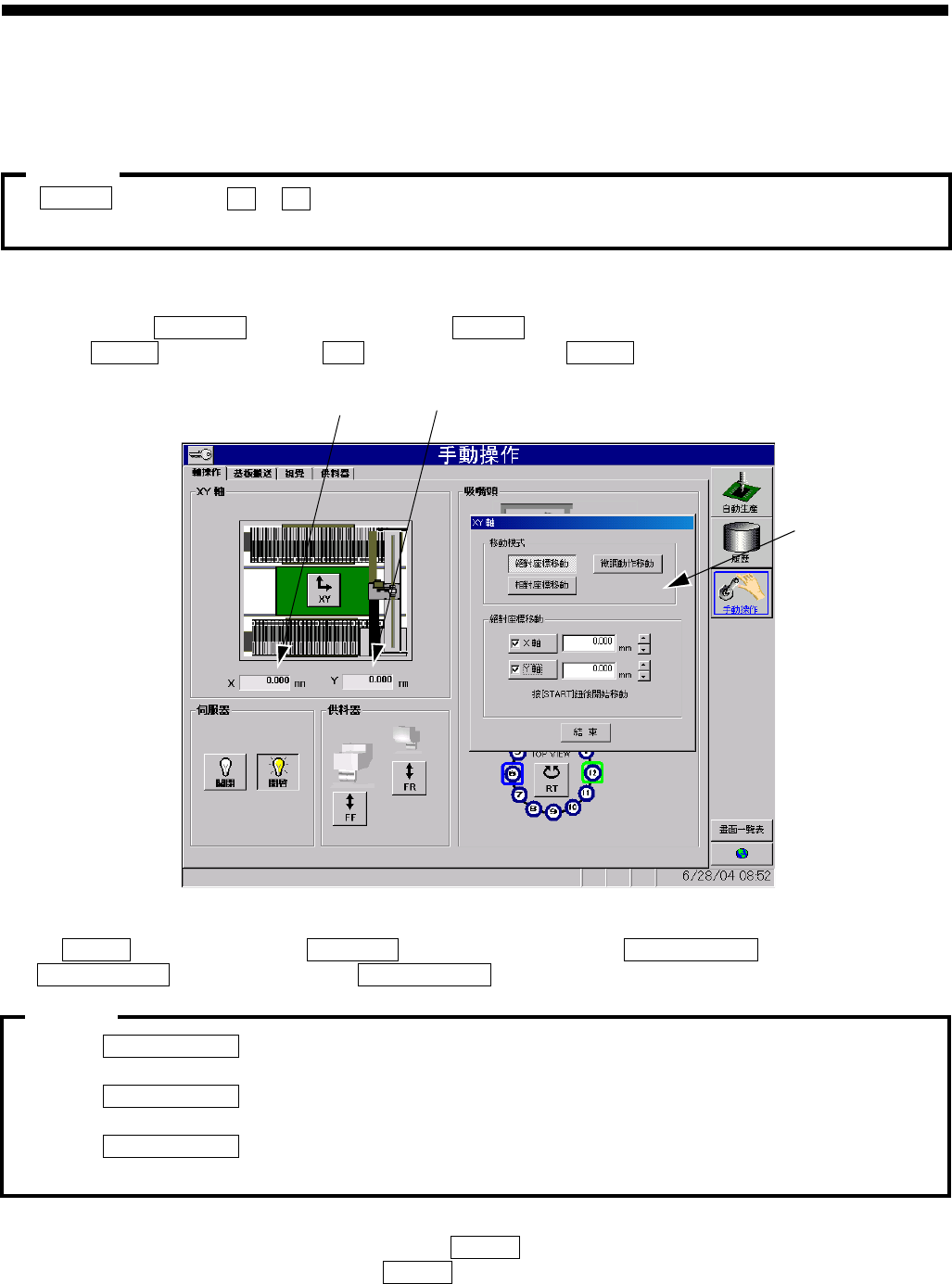
[ 操作顺序 ]
手動操作 ( ) 軸操作 ( )
XY 軸 (XY ) XY XY (XY ) 3
图
5.1.1-1
手動操作- 軸操作
(
手动操作- 轴操作
)
画面
XY (XY ) 移動模式 ( ) 絕對動作移動 ( )
相對座標移動 ( ) 微調座標移動 ( )
·所谓
絕對座標移動
(
绝对坐标移动
)
为将
SI-F130AI
的基准点当原点,往目标点移动。无
论现在位置在何处,均会移动至目标点。
·所谓
相對座標移動
(
相对坐标移动
)
为以现在位置当起始点,只移动指定的距离。即使相同
移动距离
,
若现在位置不同时,其到达位置亦会不同。
·所谓
微調動作移動
(
微调动作移动
)
为使用游标来执行
XY
轴移动。按游标时会立即微动,
连续按时即连续移动。
( 3)
, X Y 軸操作 ( ) X Y (
12) 軸操作 ( ) X Y
2
1
注意 :
注意 :
3