SI-F130AI_1st_CS.pdf.pdf - 第686页
手动控制器篇 5. 零件交换作业 5-2 SI-F130AI 关于零件交 换作业时 CAN 键的使用 · 在从上述零件交换方 法中选择一种后手动 控制器画面操 作中,按 CAN 时,实际的零 件交换即使 未完成也转到完成状 态,需要注意。 · 控制权在 SI- F1 30 机体操作板 上时的零件交换作业 ,用手动控制器读取 条形码情况下, 直到零件交 换工作结束为止,不 能用 CAN 键解除条形 码读取模式。 注意 :
手动控制器篇
5. 零件交换作业
SI-F130AI
5-1
5. 零件交换作业
5.1 零件交换作业的方法
3
· 供料器的交换
SI-F130AI SI-
F130
· 台车供料器的交换
( 使用选配的交换台车时 )
SI-F130AI 自動生產 ( )
動作設定 ( ) 台車交替 ( ) ON
· 台车全体交换
( 使用选配的交换台车时 )
SI-F130AI
3
表
5-1
装置交换台车至装置或从装置上卸下交换台车时,请不要把手放在供料台的任何一侧。
台座上升或下降时手可能被卡住,这可能导致受伤。
·
不能前侧·后侧同时进行零件交换。
·
前侧供给部的零件缺料请用与机体前侧连接的手动控制器进行交换操作,而后侧供给部的零
件缺料请用与机体后侧连接的手动控制器进行交换操作。如果不这样做,就会发生错误。
· 确认条形码
3
Type A :
Type B :
1
Type C :
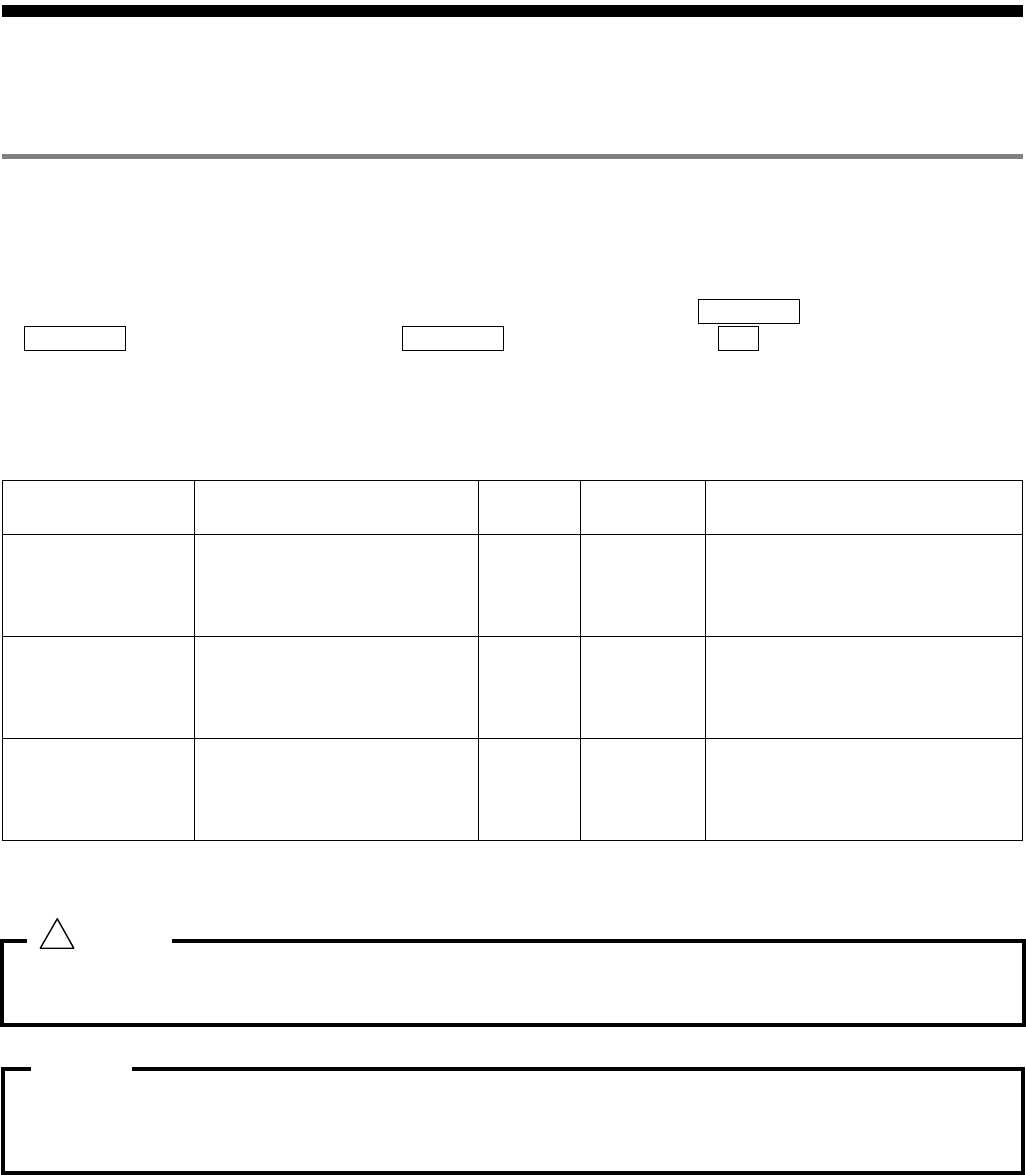
零件交换方法 说明 安全门 自动运转
残数管理
补正自动吸着位置
‧
‧
‧
注意 :
警告 :
!
手动控制器篇
5. 零件交换作业
5-2
SI-F130AI
关于零件交换作业时
CAN
键的使用
·
在从上述零件交换方法中选择一种后手动控制器画面操作中,按
CAN
时,实际的零
件交换即使未完成也转到完成状态,需要注意。
·
控制权在
SI- F130
机体操作板上时的零件交换作业,用手动控制器读取条形码情况下,
直到零件交换工作结束为止,不能用
CAN
键解除条形码读取模式。
注意 :
手动控制器篇
5. 零件交换作业
SI-F130AI
5-3
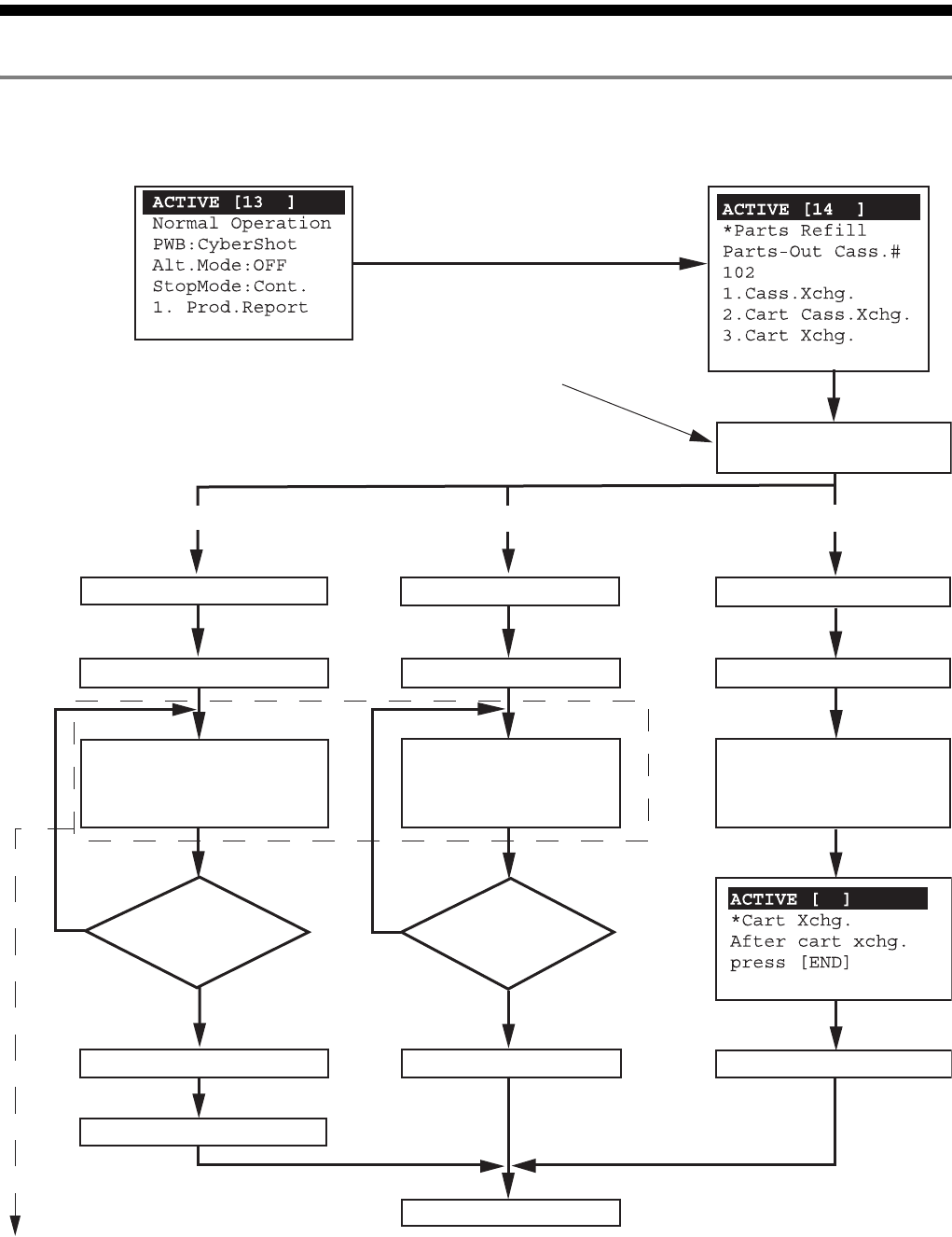
5.2 零件交换概略流向和用条形码器读取号码格式
5.2.1 零件交换概略流向
图
5-1
正常运转中
不存在条形码确认为「無」
( 无 ) 的条件
1. 供料器交换
2. 台车供料器交换 3. 台车整体交换
参照条形码确认
形式
A 、B 、C
零件交换屏幕
是
是
否否
解除锁定安全门
安全门开启
全部交换完成了吗?
交换显示号码的供料器
(确认零件
ID)
安全门关闭
锁定安全门
台车下降
台车取出
交换显示号码的供料器
(确认零件
ID)
全部交换完成
了吗?
台车上升
Prod.Report 画面
输入操作者
ID 条形码
台车下降
台车取出
推入搭载未缺料
供料器的其它台车
台车上升
不存在条形码确认为「無」
( 无 ) 的条件