SI-F130AI_1st_CS.pdf.pdf - 第671页
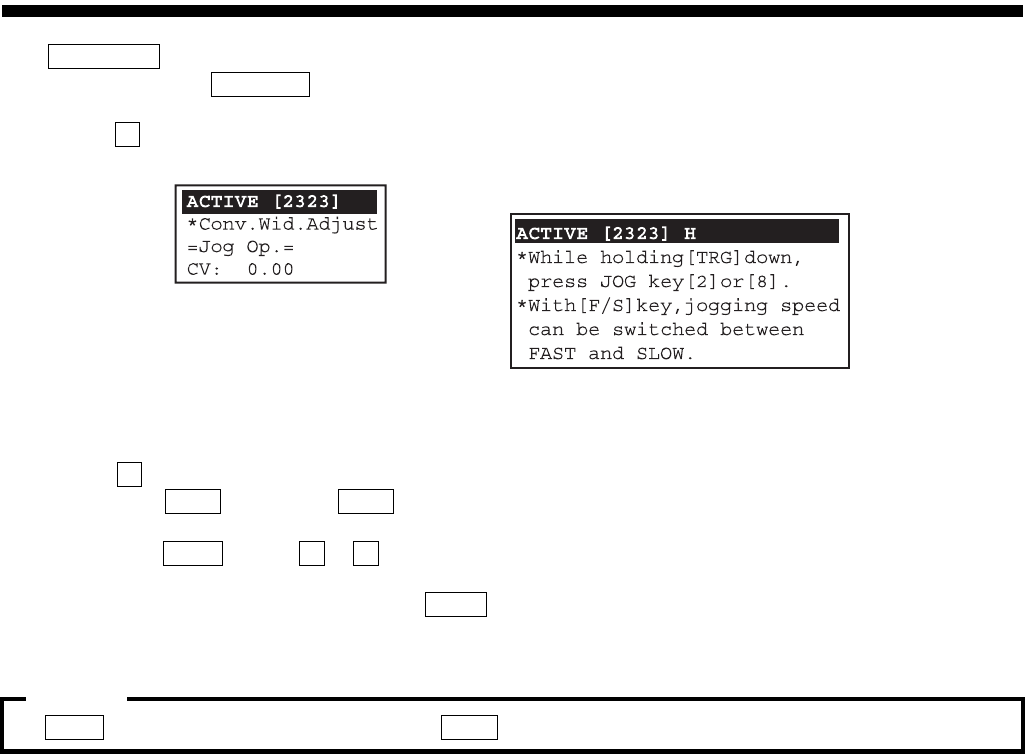
手动控制器篇 4. 操作说明 SI-F130AI 4-41 (3) Jog Op . Jog Op. [1] 3 ( ) 图 4-35 [2] 5 (F/S ) 低速 ( ) 高速 ( ) [3] TRG 2 8 ( )…
手动控制器篇
4. 操作说明
4-40
SI-F130AI
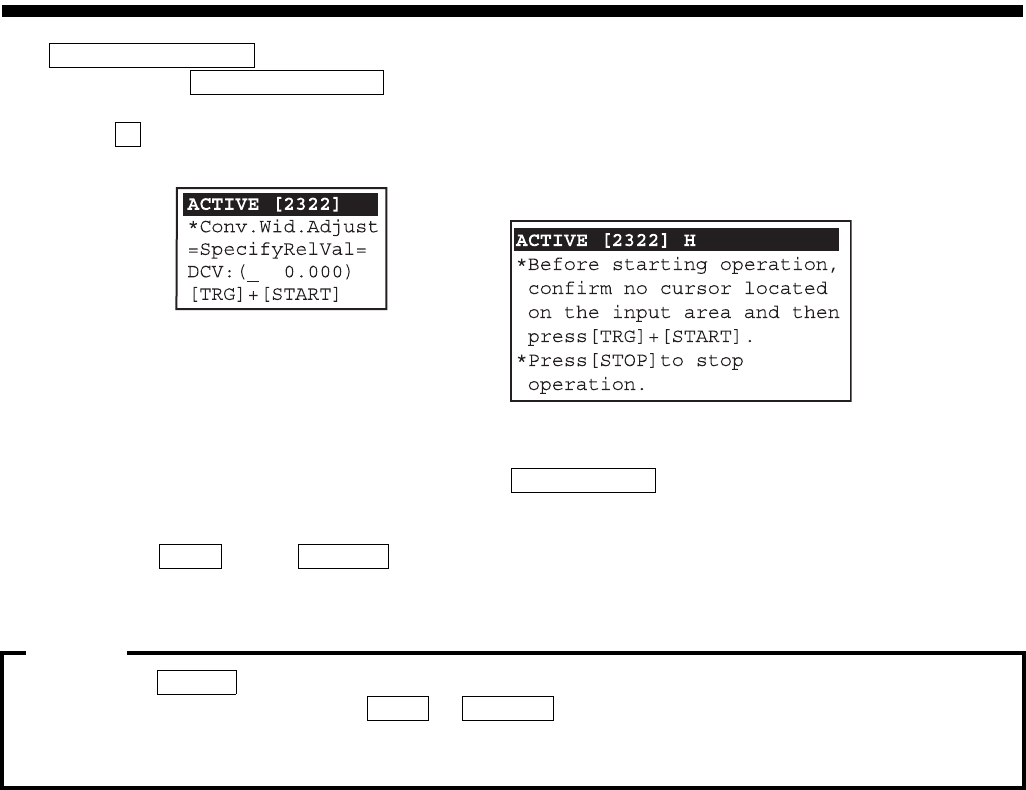
(2) SpecifyRel. Val
SpecifyRel. Val
[1] 2 ( )
图
4-34
[2]
DCV (...)
[3] TRG START
·移动中按
STOP
时,立即停止。
·轨道宽度调整输入中,如果按
TRG
和
START
不移动。
·所谓 「
SpecifyRel. Val
」,就是把现在值作为起点,移动指定值,虽然移动距离值相同,
但如果现在值发生了变化,到达点也不同。
帮助画面
注意 :
手动控制器篇
4. 操作说明
SI-F130AI
4-41
(3) Jog Op.
Jog Op.
[1] 3 ( )
图
4-35
[2]
5 (F/S)
低速 ( ) 高速 ( )
[3] TRG 2 8 ( )
TRG
低速
(
低速
)
时绿色
LED
慢速闪动,
高速
(
高速
)
时绿色
LED
快速闪动。
帮助画面
注意 :
手动控制器篇
4. 操作说明
4-42
SI-F130AI
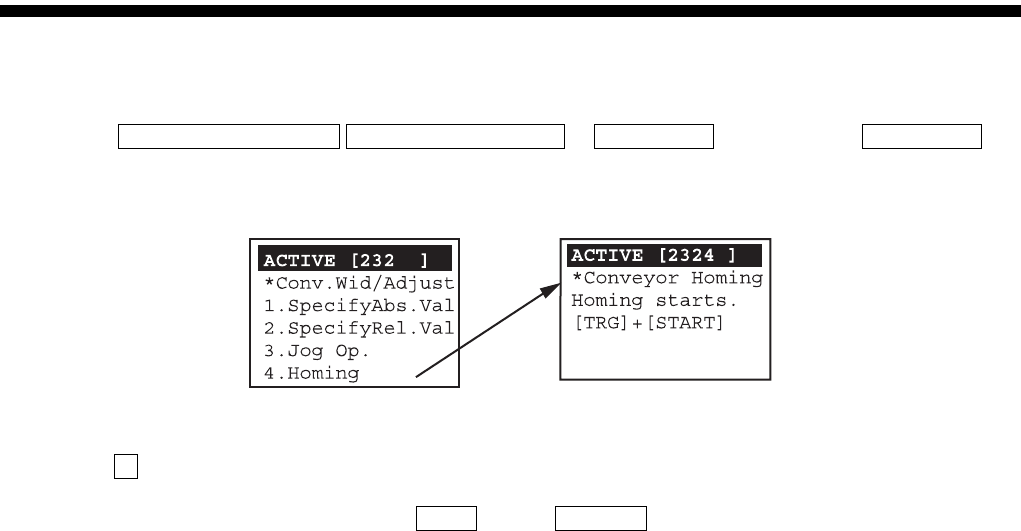
(4)
原点回复
[ 调整功能 ]
1.SpecifyAbs .Val 2.SpecifyAbs. Val 3.Jog Op. 4.Homing
[ 操作顺序 ]
图
4-36
[1]
4 ( )
[2] TRG START