SI-F130AI_1st_CS.pdf.pdf - 第202页
操作篇 5. 手动操作 5-32 SI-F130AI 5.4.1 相机操作 [ 概要 ] [ 操作顺序 ] 手動操作 ( ) …
操作篇
5. 手动操作
SI-F130AI
5-31
5.4 视觉操作
SI-F130AI
SI-F130AI
/ /
·用基板相机认识一定厚度的零件坐标时,根据相机照明和零件电极等光的反射情况,画面上坐
标值和实际值的间有时会存在误差。
注意 :
操作篇
5. 手动操作
5-32
SI-F130AI
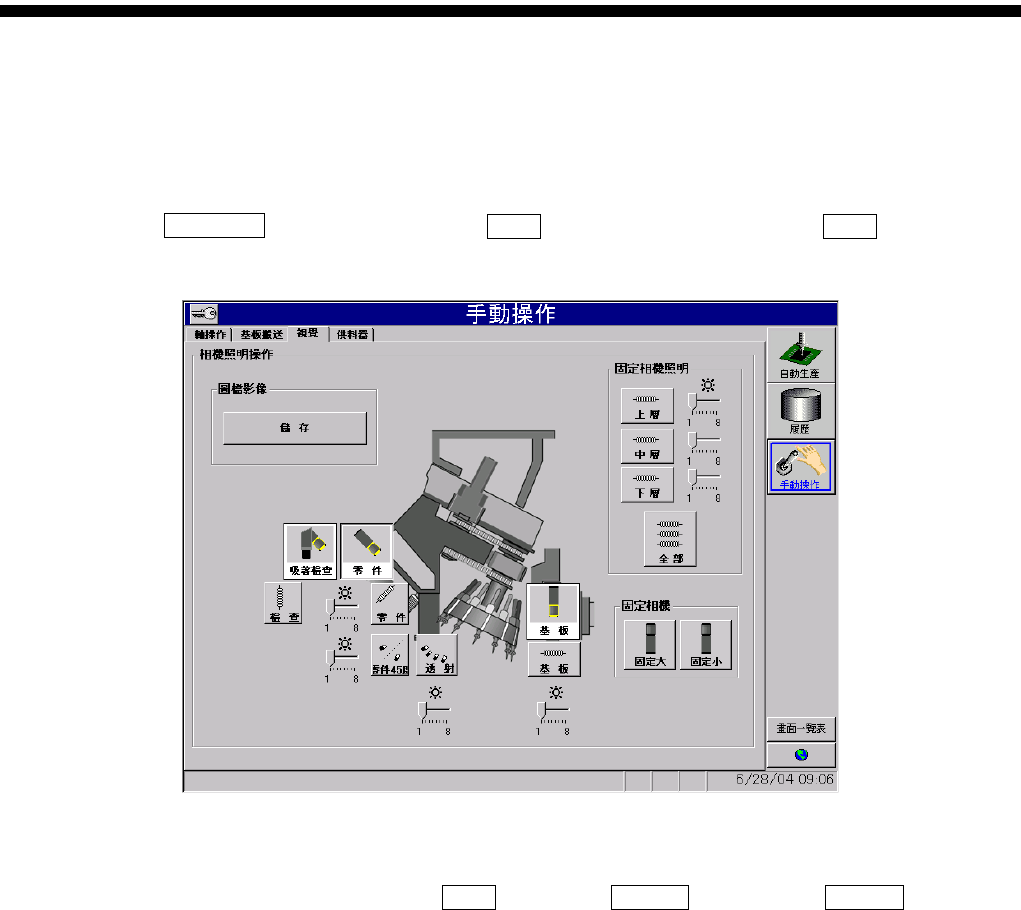
5.4.1 相机操作
[ 概要 ]
[ 操作顺序 ]
手動操作 ( ) 視覺 ( ) 視覺 ( )
图
5.4.1
手動操作- 視覺
(
手动操作- 视觉
)
书面
零件 ( ) 固定大 ( ) 固定小 ( )
操作篇
5. 手动操作
SI-F130AI
5-33
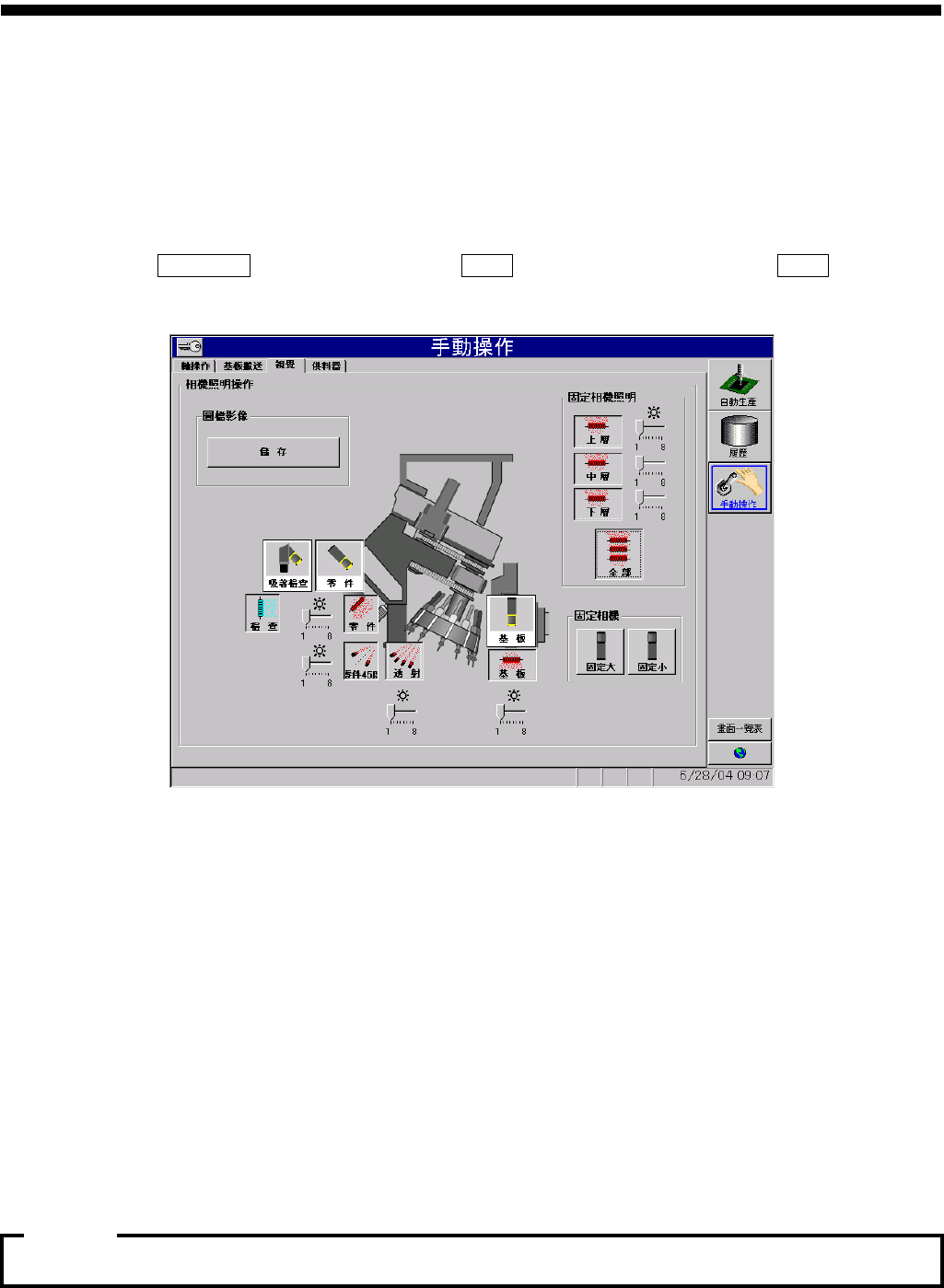
5.4.2 照明操作
[ 概要 ]
[5.4.1 ]
45
/ / SI-F130AI
[ 操作顺序 ]
手動操作 ( ) 視覺 ( ) 視覺 ( )
图
5.4.2
手動操作- 視覺
(
手动操作- 视觉
)
画面
欲使照明明亮时
欲使照明变暗时
[ 画面说明 ]
8
吸着检查相机为吸着零件时,由零件侧面检查吸着高度状态,可检查出吸着错误。
注意 :