SI-F130AI_1st_CS.pdf.pdf - 第667页
手动控制器篇 4. 操作说明 SI-F130AI 4-37 4.2.3. 1 基板的搬入 搬出操作 [ 调整功能 ] �…

手动控制器篇
4. 操作说明
4-36
SI-F130AI
4.2.3 基板搬送部操作
4.2.3.1 基板的搬入搬出操作
( )
( )
4.2.3.2 轨道宽度的调整
4.2.3.3 搬送部操作
4.2.3.4 搬送部传感器
4.2.3.5 排出器轴操作
手动控制器篇
4. 操作说明
SI-F130AI
4-37
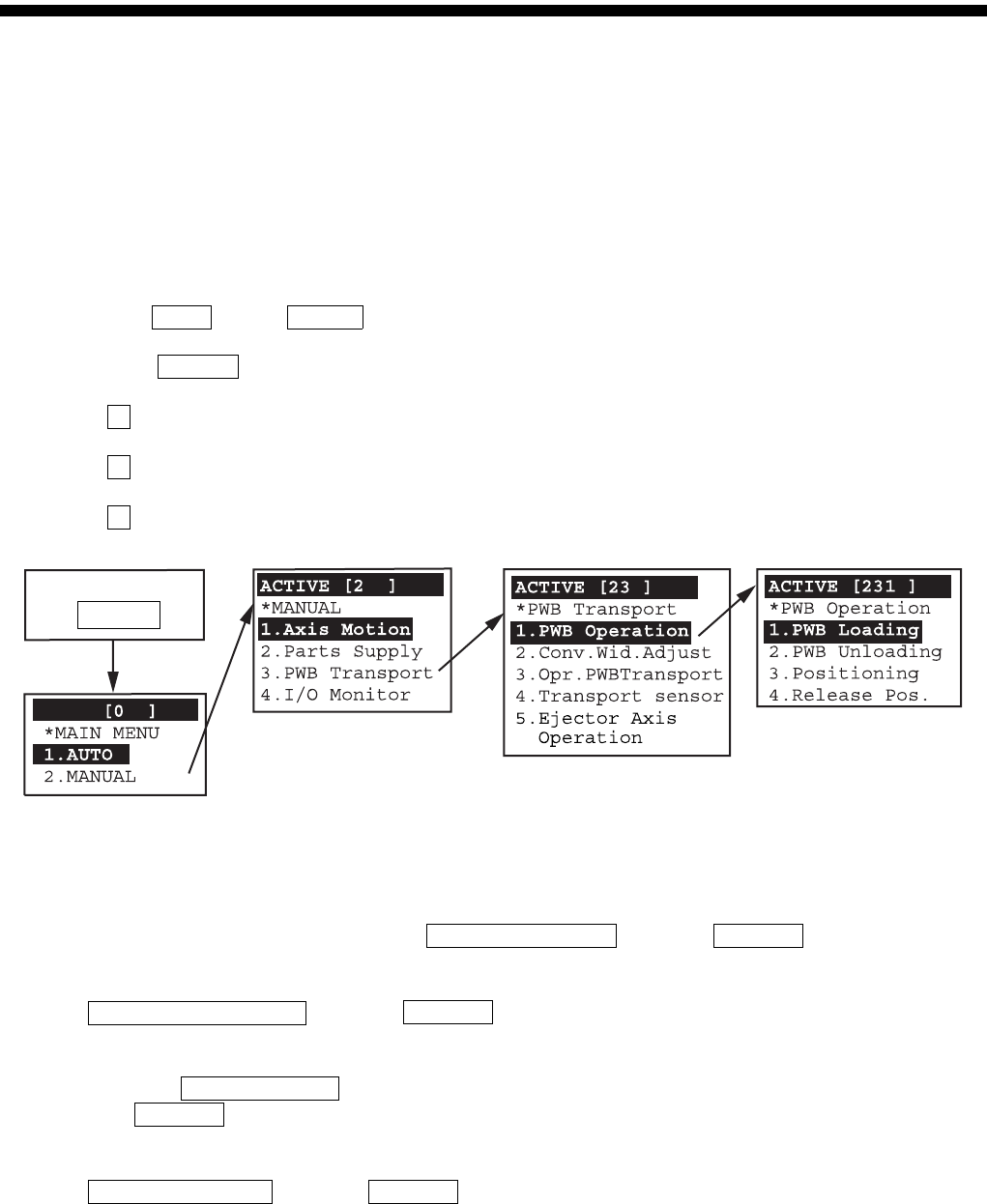
4.2.3.1 基板的搬入搬出操作
[ 调整功能 ]
( )
( )
[ 操作顺序 ]
[1]
TRG ACTV
[2] 2 MENU
[3] 2 ( )
[4] 3 ( )
[5] 1 ( )
图
4-31
[6]
(
) 1. PWB Loading ENTER
[7] ( )
2. PWB Unloading ENTER
[8] ( ( ) )
3.Positioning
ENTER
[9] ( ( ) )
4. Release Pos.
ENTER
[ 画面说明 ]
4
按 2 次
MENU
手动控制器篇
4. 操作说明
4-38
SI-F130AI
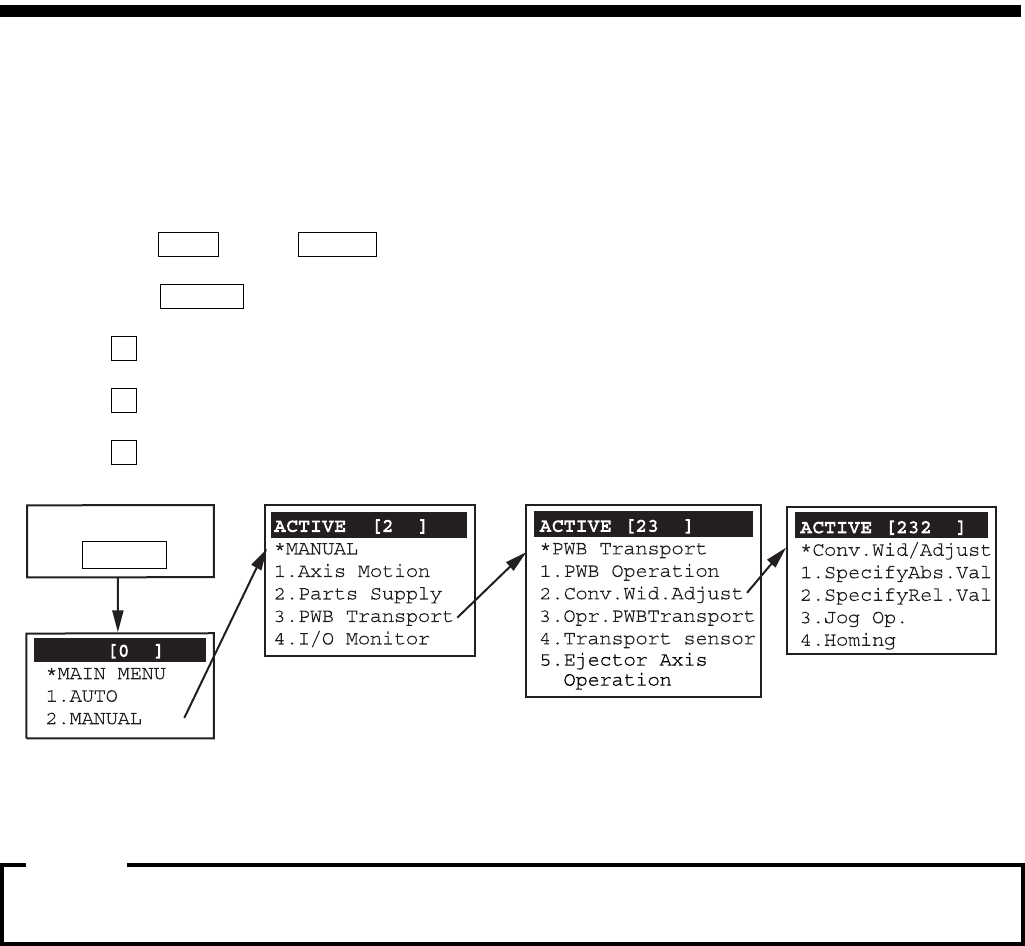
4.2.3.2
轨道宽度的调整
[ 调整功能 ]
[ 操作顺序 ]
[1] TRG ACTV
[2] 2 MENU
[3] 2 ( )
[4] 3 ( )
[5] 2 ( )
图
4-32
进行轨道宽度调整前,如果未执行轨道宽度的原点回复,有时会出现错误。
(
原点回复方法请
参照后面记述的
[4.Homing])
按 2 次
MENU
注意 :