SI-F130AI_1st_CS.pdf.pdf - 第52页
操作篇 1. 系统概要 1-16 SI-F130AI 1.5.2 零件装着姿势 0 360 1.5.3 相邻零件间的最小 间隔 ( 参考 ) 1) 0402 2) 0.2mm …
操作篇
1. 系统概要
SI-F130AI
1-15
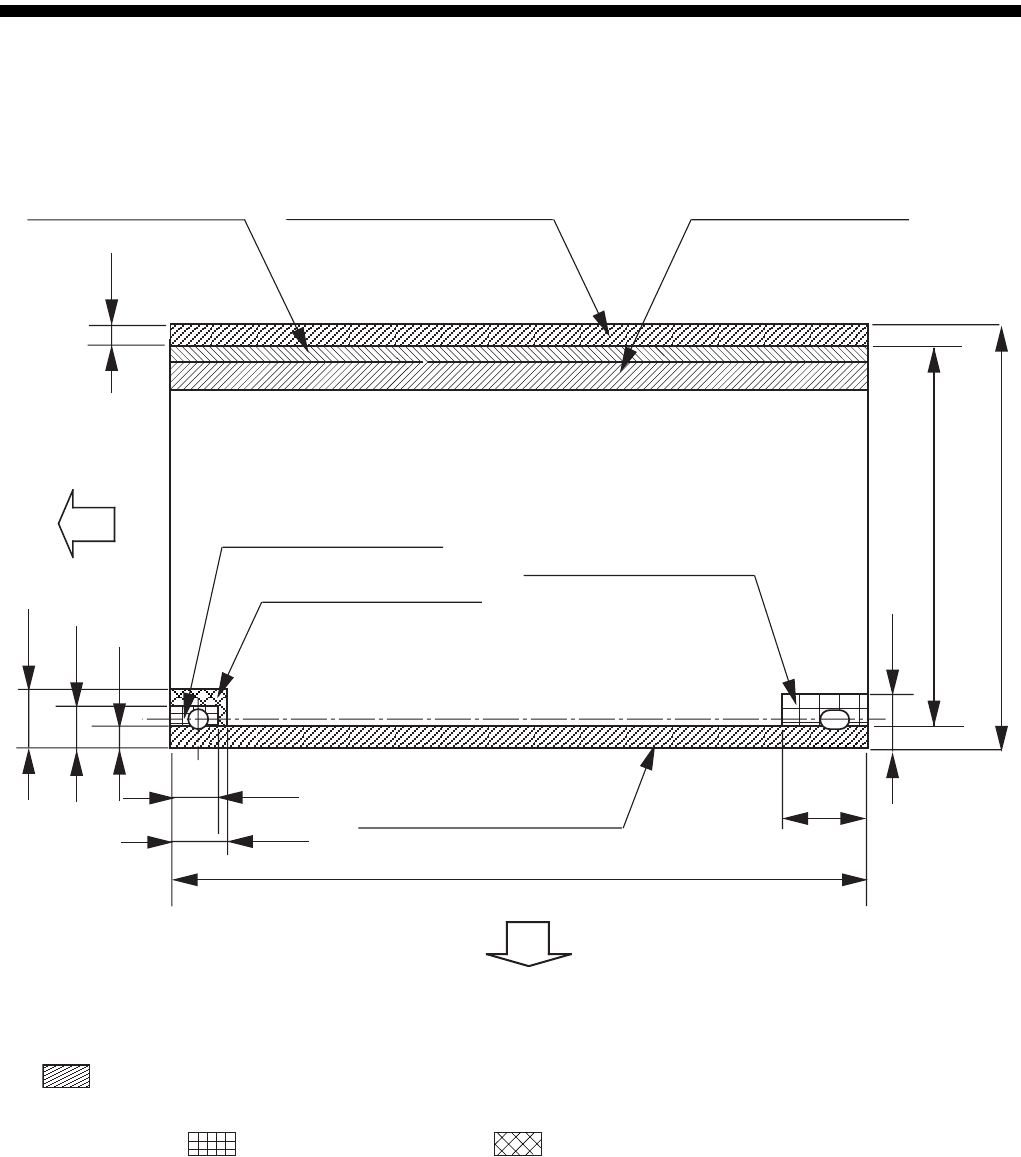
< 基板下面 >
<
零件限制 >
( )
6mm
14mm 21mm
不允许零件存在的范围
15
9
50
~ 360
可以装着的范围
不允许零件存在的范围
42 ~ 352
4
10
8.5
4
7
10
使用排出器时
零件高度
10mm 以下
使用排出器的时候
零件高度
25mm 以下
零件高度
14mm 以下
零件高度
14mm 以下
零件高度
21mm 以下
50 ~ 460
机器前侧
基板流向方向
操作篇
1. 系统概要
1-16
SI-F130AI
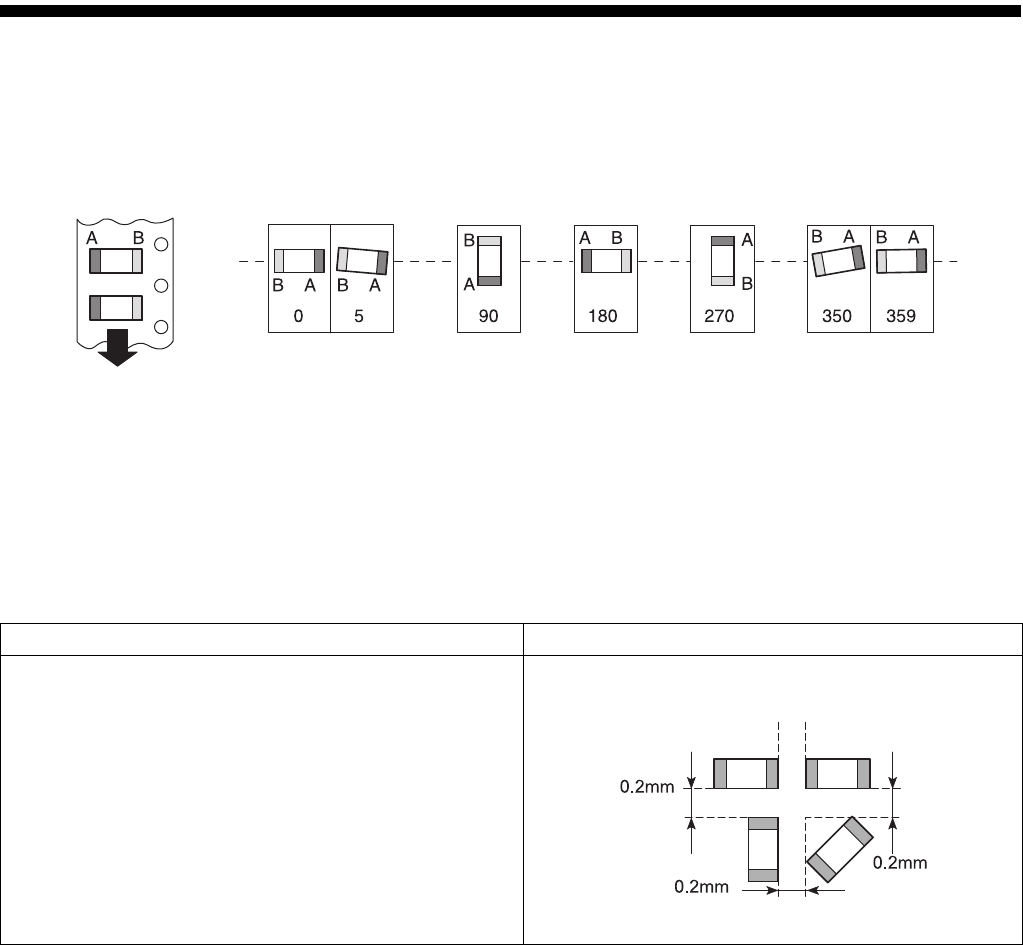
1.5.2 零件装着姿势
0 360
1.5.3 相邻零件间的最小间隔 ( 参考 )
1) 0402
2) 0.2mm 0.1mm
零件种类 零件最小间隔
0.6
0.3, 1.0 0.5, 1.6 0.8, 2.0 1.25
1)
XY 0.2 mm
2)
料带状态
0 °以上至 360°不到的范围内
操作篇
1. 系统概要
SI-F130AI
1-17
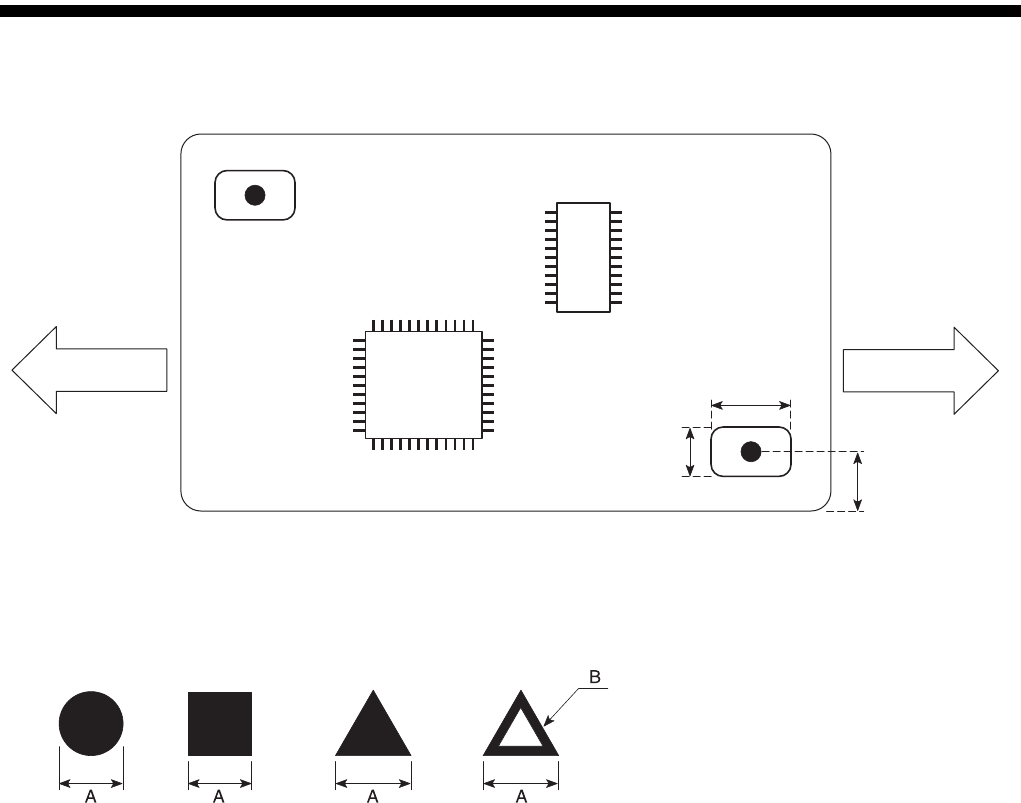
1.5.4 定位标记 (基板认识标记)
(1) 认识标记:圆形、正方形、正三角形等。
A 0.4mm 2.0mm B 0.2mm *
)
(2) 定位标记处理:
( )
( )
(3)
剥下保护膜 : 3mm × 4mm 长方形 ( 以定位标记为中心的范围 )
(4)
基板上的位置 : 基板上 2 个或 4 个对角处 ( 参照上图 )
(5)
认识定位标记 : 反射照明 / 灰色认识
(6) 其它 : 定位标记也可能被放置在丢弃基板内。
基板流动方向
基板流动方向
4.5mm 以上
4mm
3mm