hdf.pdf - 第60页
HDF 服务手册 4.3 Robot 头:驱动部 4.3-5 D45SCC-W 1-B00-A0 15. 调整θ轴同步皮带张力。 = 规格值 规格值 规格值 规格值 = 张力 : 45.1 ± 4.9N ( 4 . 6 ± 0 . 5 k g f ) = 参考 参考 参考 参考 = 请参照“ 4.3.4 调整θ轴同步皮带张力 ”。 16. 手动旋转电机皮带轮,确认皮带是否被 正确安装到各皮带轮的凹槽内。 17. 将主操作盘上的 …
HDF
服务手册
4.3 Robot 头:驱动部
D45SCC-W1-B00-A0 4.3-4
4.3.3 更换
更换更换
更换θ
θθ
θ轴电机
轴电机轴电机
轴电机
Unit No.
1048509000
更换
θ
轴电动机
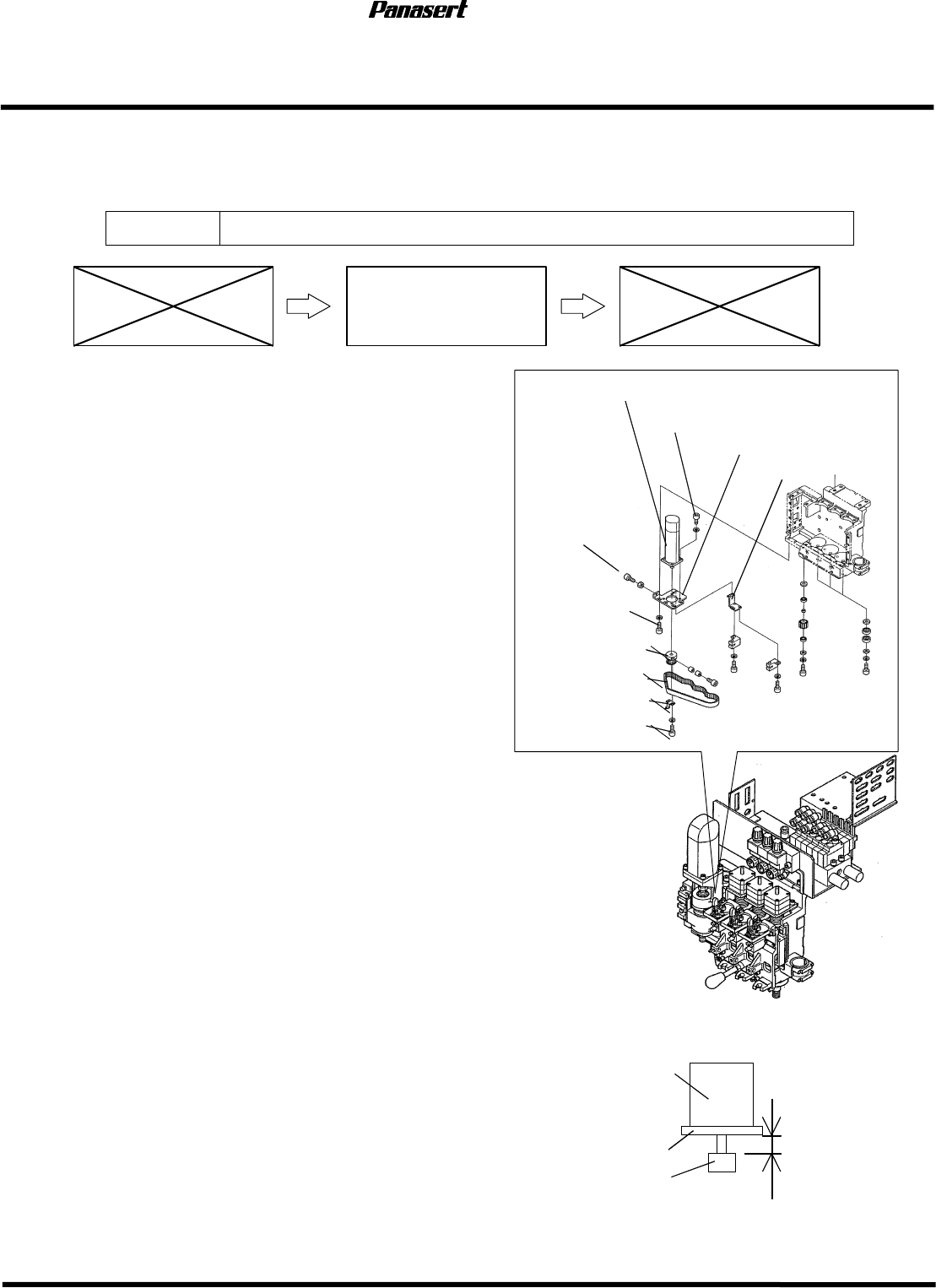
►更换θ轴电机
更换θ轴电机更换θ轴电机
更换θ轴电机
1. 打开电源,返回原点。
2. 将主操作盘上的“SERVO MOTOR”(伺服电
机)置于 [OFF]。
3. 卸下θ轴电机的配线。
4. 拧松电机机架螺栓(3个)。
5. 拧松张力调整螺栓。
6. 取下同步皮带。
7. 拆卸θ轴的(+)极限传感器和(-)极限传感器的配线。
8. 卸下电机机架螺栓(3个),朝下卸下电机机架。
9. 拧松电机皮带轮螺栓,卸下电机皮带轮。
=提示
提示提示
提示=
请务必标记皮带轮位置。
10. 卸下电机螺栓(4个),拆卸θ轴电机。
11. 将θ轴电机安装到电机机架上,以标记为基
准,安装皮带轮。
12. 从下部将θ轴电机安装到原位置处,暂时拧紧
机架螺栓。
13. 安装同步皮带,暂时拧紧电机机架螺栓。
=确认
确认确认
确认=
请确认传感器和传感器挡片不互相干扰。
14. 调整喷嘴平行度。
=参考
参考参考
参考=
请参照“4.4.2调整喷嘴平行度” 。
=参考
参考参考
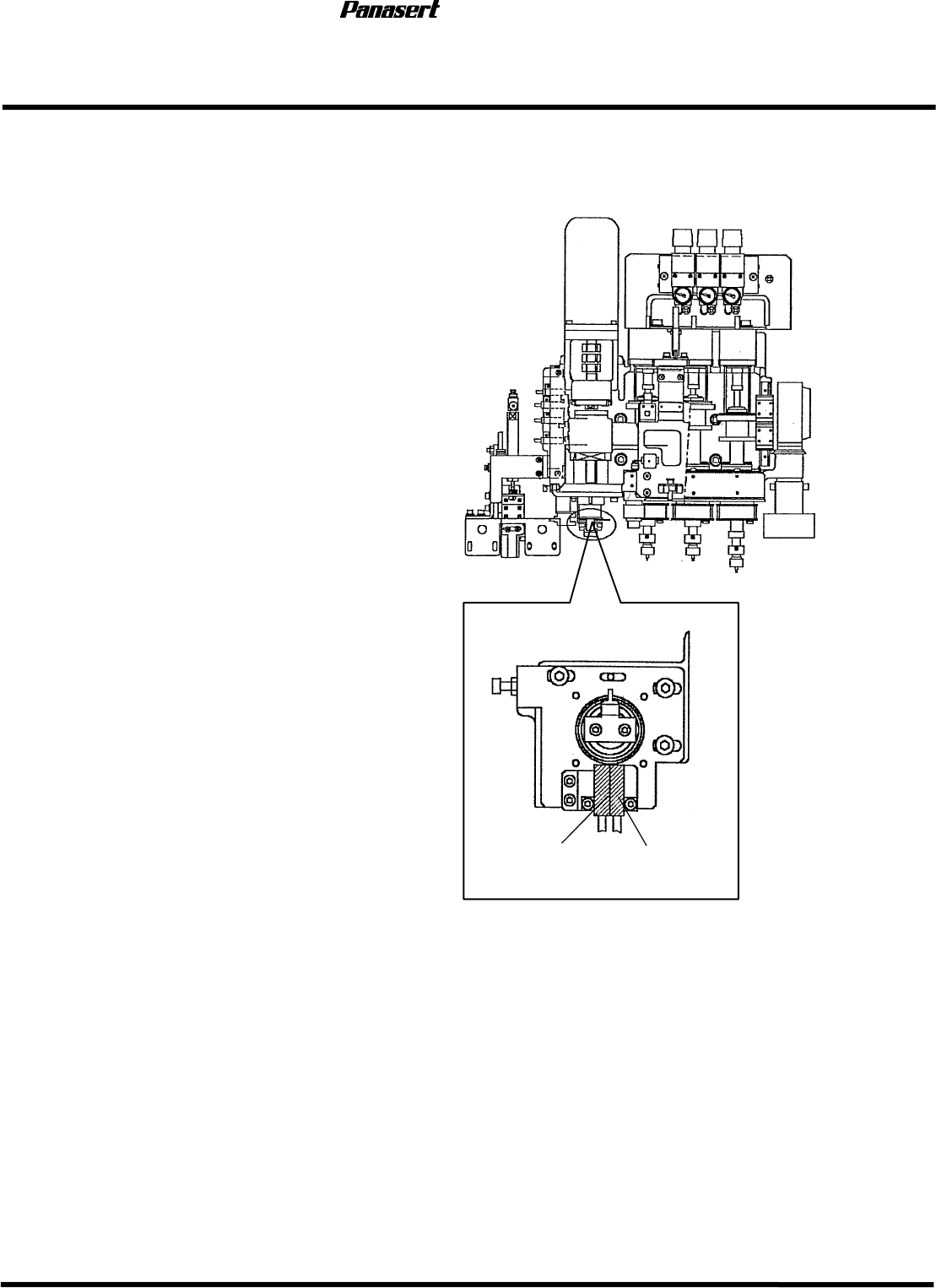
参考=
将皮带轮安装到电机时,请确认电机和皮带
轮之间的间隙为0.5 mm 。
(
头
组
件
)
张力调整
螺栓
0.5 mm
同
步
皮
带
传
感器托架
电
机机架
电
机皮
带轮
传
感器
挡
片
电
机螺栓
θ
轴电机
电
机机架螺栓
θ
轴电机
电
机皮
带轮
电
机机架
传
感器
挡
片螺栓
HDF
服务手册
4.3 Robot 头:驱动部
4.3-5 D45SCC-W1-B00-A0
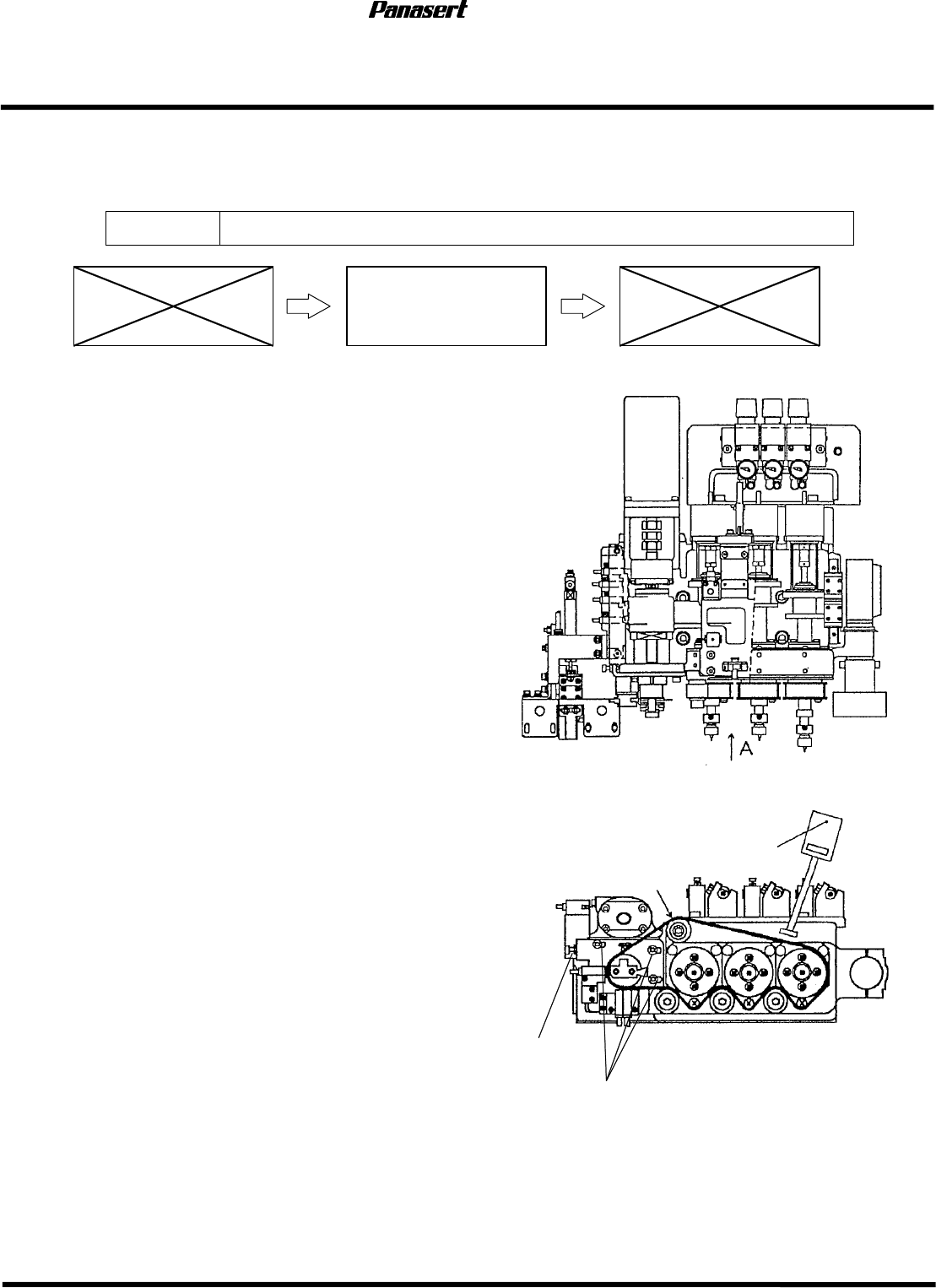
15. 调整θ轴同步皮带张力。
=规格值
规格值规格值
规格值=
张力: 45.1 ± 4.9N
(4.6 ±0.5kgf)
=参考
参考参考
参考=
请参照“4.3.4 调整θ轴同步皮带张力”。
16. 手动旋转电机皮带轮,确认皮带是否被
正确安装到各皮带轮的凹槽内。
17. 将主操作盘上的 “SERVO MOTOR”
(伺服电机)置于 [ON]。
1st
极限
-1st
极限
HDF
服务手册
4.3 Robot 头:驱动部
D45SCC-W1-B00-A0 4.3-6
4.3.4 调整
调整调整
调整θ
θθ
θ轴同步皮带张力
轴同步皮带张力轴同步皮带张力
轴同步皮带张力
Unit No.
调整
θ
轴同步皮带张力
=准备
准备准备
准备=
1.音波式皮带张力计
►调整
调整调整
调整θ
θθ
θ轴同步皮带张力
轴同步皮带张力轴同步皮带张力
轴同步皮带张力
1. 打开电源,返回原点。
2. 将主操作盘上的“SERVO MOTOR”(伺服
电机)置于 [OFF]。
3. 向音波式皮带张力计输入如下数值。
=提示
提示提示
提示=
W :皮带宽度::9 mm
S :皮带跨度:121mm
M :单位重量: 0.25 gf/cm
2
4. 确认θ轴同步皮带张力。
=规格值
规格值规格值
规格值=
张力:45.1 ±4.9N
(4.6 ± 0.5kgf)
5. 规格值以外时,拧松电机托架螺栓(3个)。
6. 拧松锁紧螺母。
7. 用张力调整螺栓调整张力。
8. 拧紧电机托架螺栓。
9. 拧紧锁紧螺母。
=注意
注意注意
注意=
让头托架侧面和电机板侧面平行。
10. 再次确认θ轴同步皮带张力。
从
A
侧看的视图
音波式皮
带张
力
计
θ
轴皮带
张力调整螺栓
电机板螺栓