SIPLACE Machine de placement 80 S FG.pdf - 第206页
7 Systèmes V ision Notice d’exploi tation SIPLACE 80 S/F/G 7.2 Système Vision pour cartes Edition 07/97 Version du l ogic iel à partir de SR.010.xx 7 - 14 et les voy ants LED p our - le CPU - le proces seur V ision - l&a…
Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision
Edition 07/97 Version du logiciel à partir de SR.010.xx 7.2 Système Vision pour cartes
7 - 13
7.2 Système Vision pour cartes
Le système Vision pour cartes détermine la position exacte de la carte par analyse des marques et détecte le
décalage dans le sens des x et des y, le décalage en rotation par rapport au sens de convoyage de la carte et
le cisaillement de la carte. Les circuits marqués défectueux (points d'encre) sont également détectés et éva-
lués par le système Vision pour cartes.
7.2.1 Description du système
Le système Vision pour la reconnaissance de position des cartes se compose
●
d'un système optique de reconnaissance de position des cartes
Chaque tête revolver de placement est pourvue d'un système de reconnaissance de position des cartes
(voir fig. 7.1.2). En ce qui concerne l‘automate de collage, le système de caméra C.I. se trouve au - des-
sous du portique (voir Fig. 7.1.8, page 7 - 10).
NOTA :
la reconnaissance de la position des cartes n‘est effectuée qu‘avec le portique 1.
●
d'une unité d'analyse Vision
Pour chaque portique, il existe dans la baie de commande de la machine une unité d'analyse de recon-
naissance de position des cartes et des composants (voir fig. 7.1.3, 7.1.6 et 7.1.9). La tête de collage est
uniquement pourvu d'un système de reconnaissance de position des cartes.
Une caméra CCD (caméra Sony XC77) avec un système optique de reproduction et d'éclairage intégré cons-
titue le système optique de reconnaissance des cartes. Le champ visuel du module de carte est de 5,7 mm x
5,7 mm. Dans les limites des champs visuels, on peut délimiter une zone de recherche dont la position et les
dimensions sont librement programmables. L'optique de reproduction est une optique de mesure spéciale qui
compense au mieux les défauts de mesure résultant des bombements des cartes. L'éclairage ne fonctionne
que pour l'enregistrement des marques.
L'unité d'analyse Vision (MVS) est un système à platine unique selon standard VME. Le matériel comprend :
●
la carte mère MVS100
avec processeur Vision et des connexions interfaces la face arrière de la platine est pourvue
-
des connexions pour le bus VME et
-
de la communication à haute vitesse (HS
3
L)
Sur la face avant de la platine se trouvent les connecteurs pour
-
le moniteur
-
jusqu'à 4 entrées de caméra
-
deux interfaces série (RS232 ou RS422)
Machine Caméra cartes Unité d’analyse MVS
80S (2 portiques) 2 2
80F (1 portique) 1 1
G (1 portique) 1 1

7 Systèmes Vision Notice d’exploitation SIPLACE 80 S/F/G
7.2 Système Vision pour cartes Edition 07/97 Version du logiciel à partir de SR.010.xx
7 - 14
et les voyants LED pour
-
le CPU
-
le processeur Vision
-
l'entrée caméra
-
l'écran
Les interrupteurs pour "RESET" et "ABORT" se trouvent sous les voyants LED
●
l'interface caméra MVS500 (platine d'extension) pouvant recevoir jusqu'à 4 caméras CCD
7.2.2 Caractéristiques techniques
Caméra : SONY XC77
Nombre de pixels : caméra 768 (H) x 494 (V)
image 640 (H) x 484 (V)
Champ visuel : 5,7 mm x 5,7 mm
Eclairage : Eclairage incident (activé lors de l'opération de mesure)
Traitement de l'image : Principe de corrélation, système des valeurs de gris
Durée cycle processeur : < 200 msec
Ecran : Moniteur RGB (Mode VGA) 640 x 484 pixels du
calculateur de module
Marques : Mémoire de bibliothèque d'une capacité maximale de 255
définitions de marque
7.2.3 Description de fonctionnement
Avant le placement, le système Vision détecte la position, l'angle de décalage en rotation et le cisaillement de
la carte en fonction de la position des marques. Des écarts des valeurs de consigne sont alors évalués pour
corriger les positions de placement des composants.
Chaque carte doit comporter au moins 2 marques pour que le système puisse reconnaître des écarts de la
position et de l'angle de rotation de la carte. Si une carte est dotée de 3 marques, vous obtenez des informa-
tions supplémentaires concernant des déformations de la carte et du layout de la carte.
7.2.4 Mode de fonctionnement
Avant de pouvoir reconnaître une marque, elle doit être lue en mode d'apprentissage, c'est-à-dire, les para-
mètres de la structure de marque doivent être enregistrés dans le système Vision cartes pour le dessin de la
marque.
●
La structure de la marque est lue en mode d'apprentissage à l'aide de la caméra Vision cartes, fixée sur la
tête de placement et grâce au programme Vision:<~>
L'unité d'analyse Vision détermine les paramètres significatifs des marques à l'aide du traitement d'image
digital:
Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision
Edition 07/97 Version du logiciel à partir de SR.010.xx 7.2 Système Vision pour cartes
7 - 15
●
L'opération de mesure se déroule en 2 étapes:
-
Procédé de recherche du motif à 2D (procédé à 2 dimensions) dans la trame grossière et
détermination provisoire des coordonnées de marque.
-
L'opération de recherche du motif à 1D (procédé à une dimension) pour la reconnaissance exacte de
la position des marques.
Pour le procédé de recherche de motif à 2D, la fenêtre de reconnaissance de motif est divisée en zones de
moxels. Par moxel (
mo
saïque de pi
xel
) on comprend des champs de pixels avec p.ex. 16 x 16, 8 x 8 etc. de
pixels. Plus le nombre de pixels est petit, plus la résolution est élevée et plus la vitesse de recherche est faible.
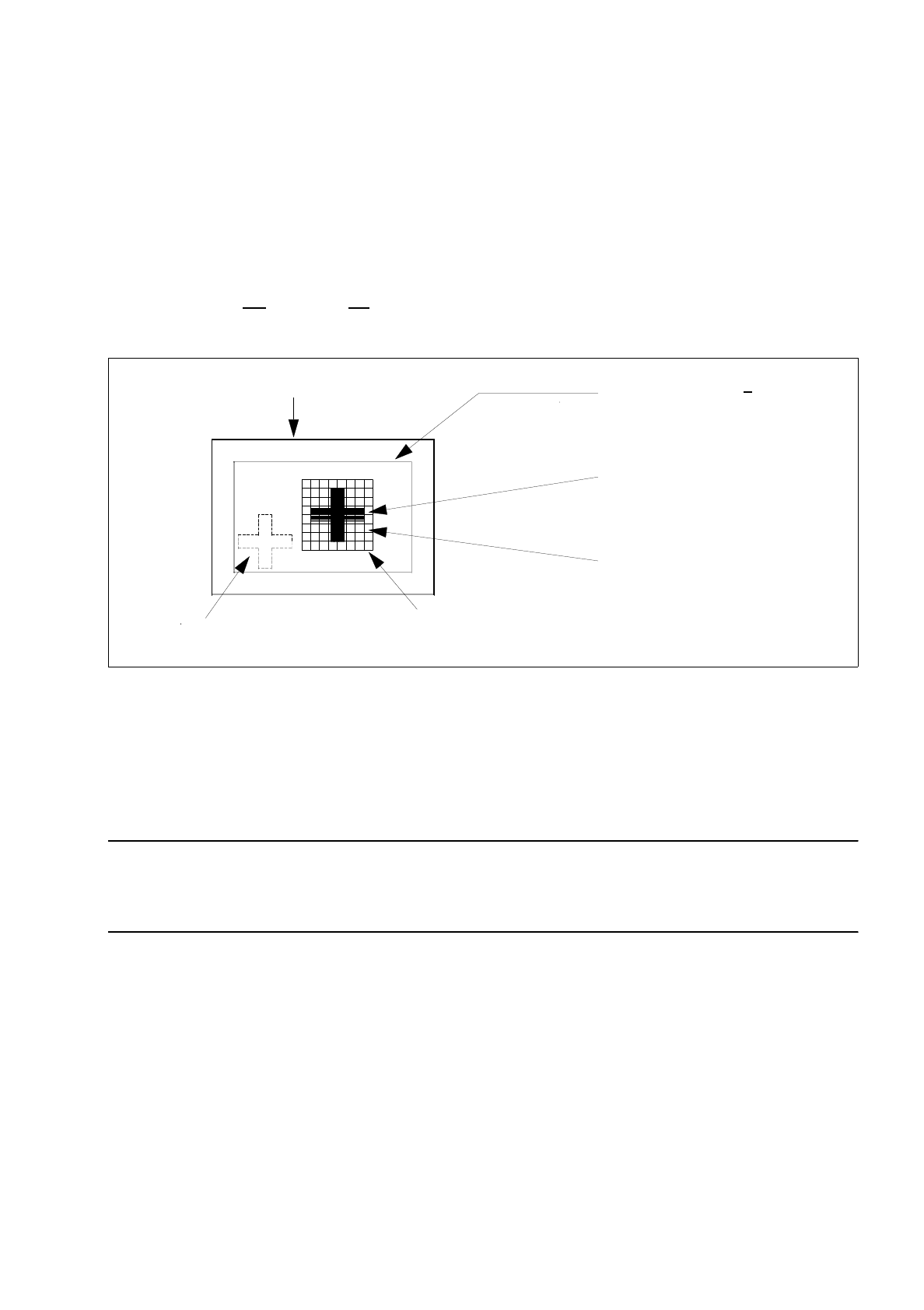
Fig. 7.2.1 Explication du champ visuel caméra, de la zone de recherche et de la fenêtre de recherche de motif
La fenêtre de recherche de dessin modèle est déplacée sur la zone de recherche en pas de moxels. Ainsi on
calcule les valeurs de gris pour chacun des moxels de la marque de référence. Cette structure de données
comprend assez d'informations sur la structure grossière et la position de la marque de référence.
NOTA
La fenêtre doit être choisie aussi petite que possible pour atteindre une vitesse de recherche élevée.
Cependant elle doit être suffisamment grande pour reconnaître clairement la marque.
Pour la détection exacte du motif et de la positon de la marque, on se sert du procédé de recherche à 1D.
L'image de la marque est divisée en lignes et en colonnes, les valeurs de gris à l'intérieur de chacune des
lignes et de chacune des colonnes sont additionnées. La figure suivante explique ce processus à partir d'une
croix double.
Zone de recherche <
champ visuel caméra
(dans cette zone on recherche
la marque)
Marque de référence
Moxel = champ de pixels
p.e. 16 x 16 pixel
Champ de recherche de motif
(contenant la marque de référence)
Champ visuel caméra
Marque à chercher