JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第11页
JAKA Zu 7 v2.5 和 JAKA C 7 9 1.强制手动 移动机器人手 臂仅限于紧急 情况,并且 有可能会损 坏关节,不 可作为日常操 作。 2.如果手动 释放了制动器 ,机器人可能 会在重力作 用下发生运 动,因此在 手动释放制动 器前务必对机 器人 本体及安装 在机器人上的 工具或工件进 行有效支撑。 1.9 运输及搬 运注意事项 机器人运输 时需要固定好 原包装,保证 机器人是稳定 的,并保持干 燥。 机器人吊装 时,…
8
JAKA Zu 7 v2.5 和 JAKA C 7
机器人在有毒或者腐蚀性的环境中运转时存在伤人的情况。
1.6 使用用途
JAKA Zu 7 和 C 7 是工业化协作机器人,适用于工业环境中,例如用于操纵设备或固定工具,或用于加工或
传递零件或产品。JAKA Zu 7 和 C 7 只允许在规定的条件与环境下使用。
JAKA Zu 7 和 C 7 具有特殊的安全评级特征,这些特征是特地为协同操作而设计的,也就是说机器人可以在
没有护栏的情况下工作,或者和人类一起工作。协同操作仅针对无危险的应用,即工具、工件、障碍物及其他机
器都经过针对特定应用的风险评估证明不具备重大危险的完整应用。
任何与拟定用途相违的用途或应用都是不允许的。这包括但不限于以下内容:
用于有粉尘等可能发生爆炸的环境中;
用于与生命相关的场合中;
未作危险评判就使用的;
评判的性能等级不合格就使用的;
操作在允许的操作参数之外的。
1.7 紧急情况
当发生紧急情况时,按下急停按钮,可以立即停止机器人的一切运动。紧急停机不可用作风险降低措施,但
可视为次级保护设备。
1.8 无电力驱动的移动
在机器人电源失效或者未使用电源等紧急状况下,可以通过以下两种不同方法来迫使机器人关节移动:
1.强制手动驱动:通过推或拉机器人手臂,能够迫使关节转动。每个关节的制动器均有一个摩擦离合器,
当关节所承受的扭矩大于摩擦离合器的安全扭矩时,关节发生转动。
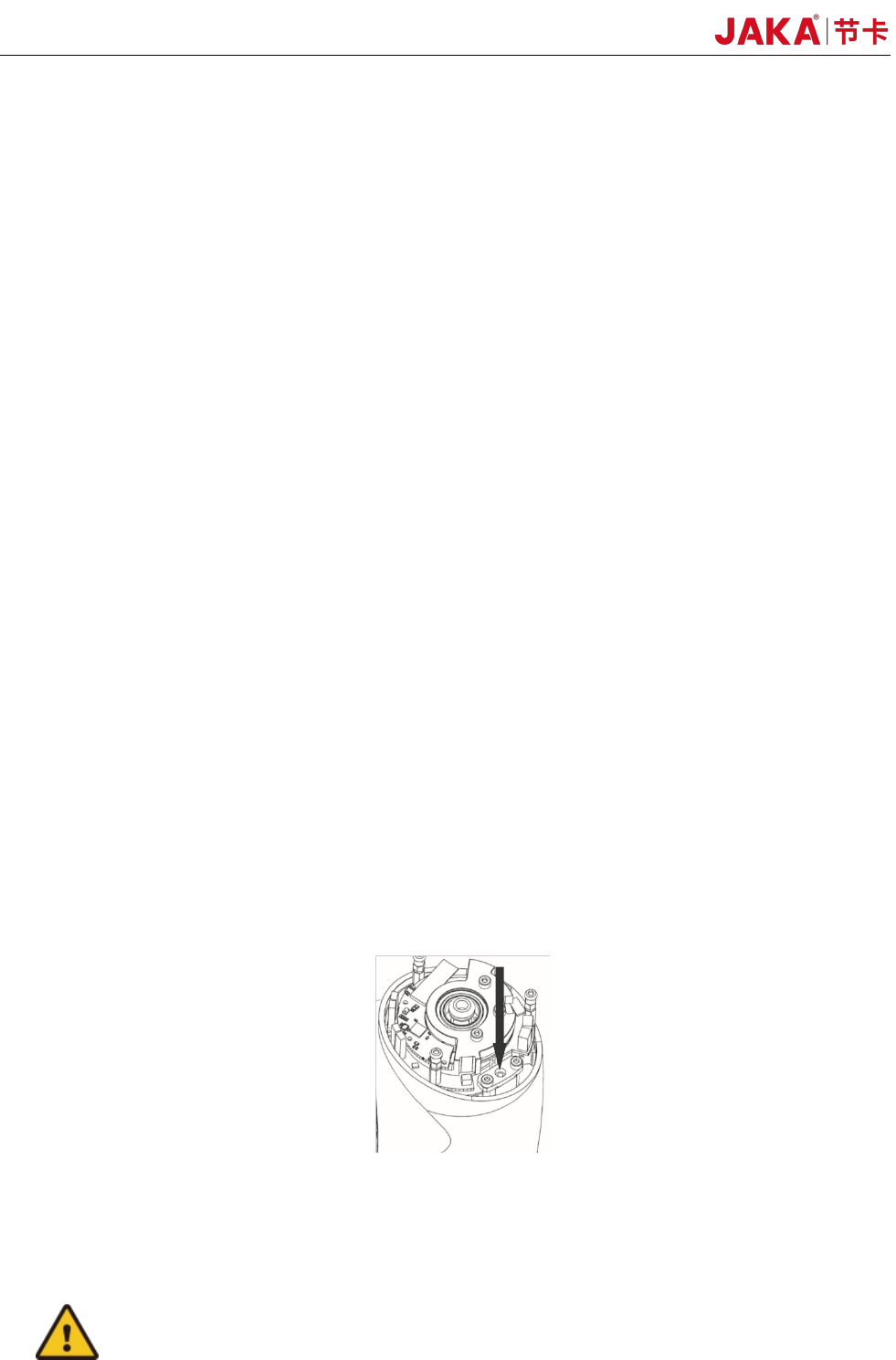
2. 手动释放制动器:卸下用于固定关节端盖的几颗螺钉后取下关节端盖。按下小型电磁铁(如下图所示)
中的滑杆,可以手动释放制动器。
图 1-1 手动释放制动器
警告:
JAKA Zu 7 v2.5 和 JAKA C 7
9
1.强制手动移动机器人手臂仅限于紧急情况,并且有可能会损坏关节,不可作为日常操作。
2.如果手动释放了制动器,机器人可能会在重力作用下发生运动,因此在手动释放制动器前务必对机器人
本体及安装在机器人上的工具或工件进行有效支撑。
1.9 运输及搬运注意事项
机器人运输时需要固定好原包装,保证机器人是稳定的,并保持干燥。
机器人吊装时,应采取相应措施进行定位,避免产生意外运动造成损伤。
从机器人的包装中将机器人移至安装位置时,应扶住机器人直至机器人底座的所有螺栓全部紧固好。
警告:
1.确保抬升设备时您的背部或身体其他部位不会过分负重。使用适当的抬升设备。节卡不对设备运输过程
中产生的损害负责。
2.确保安装机器人时严格遵守安装指示。
10
JAKA Zu 7 v2.5 和 JAKA C 7
第 2 章 欢迎使用小助机器人
在阅读本章前,请确保您已经详细阅读并充分理解第 1 章的《安全规范》。
本章将快速介绍节卡小助系列协作机器人的基本组件与使用方法,作为对机器人的初步了解。详细的机械电
气规格、软件操作手册请参考其它章节。
在使用过程中,如果您需要快速帮助,请拨打我们的快速咨询热线:400-006-2665。
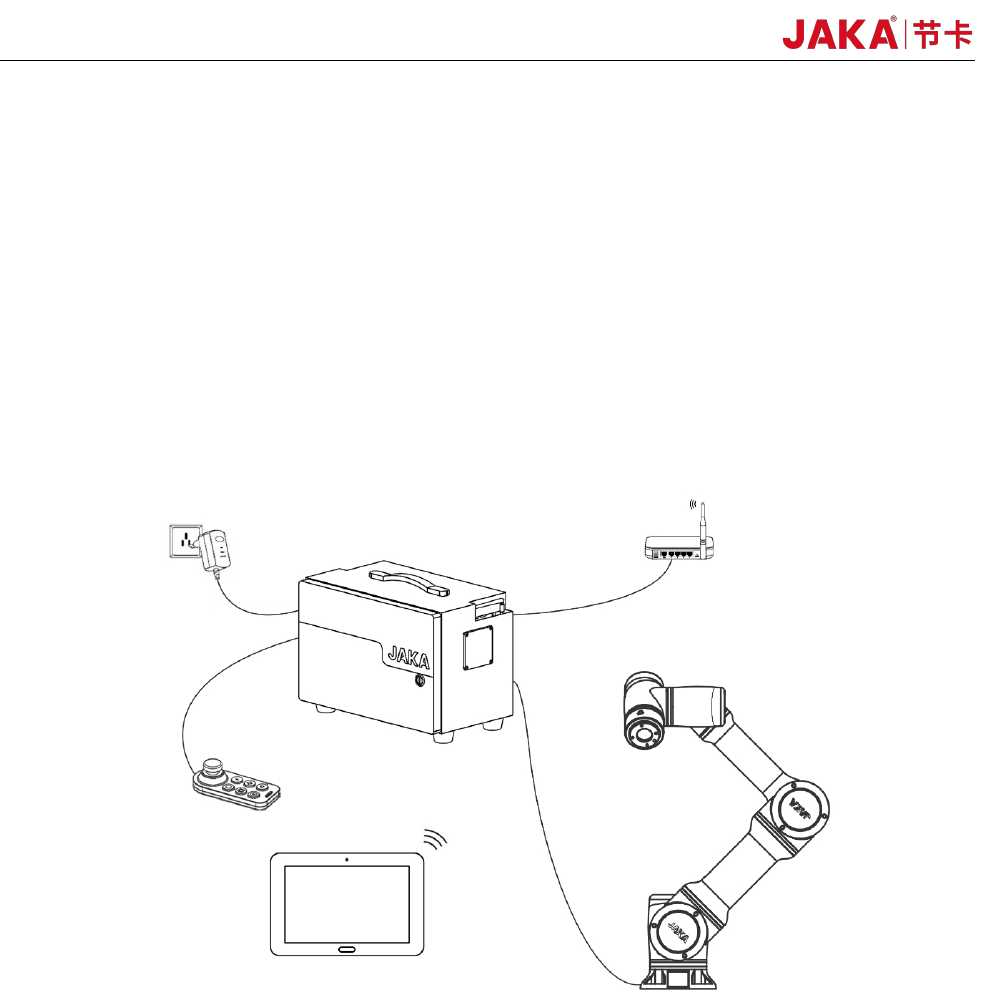
2.1 机器人部件概览
图 2-1 机器人部件概览
如图 2-1 所示,JAKA Zu 和 C 系列机器人使用无线互联的方式,使用时需要包括以下几个部件:
操作终端:用户进行编程、设置等操作的设备。
机器人本体:主要运动部件,实现用户期望的动作。同时本体末端布置有指示机器人状态的环形指示灯、用
于拖拽和编程的按钮、以及连接工具的 IO 接口,即 TIO 接口。
电控柜及其手柄:电控柜包括核心运算部件,以及多种电气接口,同时电控柜配备有方便用户操作的手柄。
路由器与网线等:电控柜的网口应连接至路由器上,操作终端同时也连接至此路由器的无线网络内。推荐为
JAKA Zu 系列机器人单独配置路由器以防止与其它设备冲突。
2.2 操作终端
节卡提供基于 Android 系统开发的 JAKA Zu 和 C 系列机器人操作软件,该软件推荐的运行硬件配置如表 2-1: