JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第9页
JAKA Zu 7 v2.5 和 JAKA C 7 7 1 .使用机器人 系统的作业人 员严禁穿宽松 的衣服, 严禁佩戴珠 宝, 头发较 长的作业人 员请确保长头 发被束在脑后 。 2 .在设备运转 的过程中,即 使机器人看上 去已经停止 ,也有可能是 因为机 器人在等待 启动信号而处 在即将动作的 状态。 即使在这样的状态 下, 也应 该将机器人 视为正在动作 中。 3 .在机器人运 转过程中,应 保证电控柜电 源线和机器人 电源线可…
6
JAKA Zu 7 v2.5 和 JAKA C 7
1.需要专业调试人员对机器人按照规范进行安装和调试。
2.机器人参数的设置和更改须由有许可的人员进行,并防止未授权
的人员更改参数。
3.切勿频繁地开关供电系统,JAKA Zu 7 每个关节模块内都有刹
车装置,断电时能够保持姿态。
4.当机器人设置受力超过一定范围时,机器人将会停止运动,以防
止机器人损坏或操作人员受伤,这是由于 JAKA Zu 7 具有碰撞检测功
能。如果操作人员使用自己的电控柜,带来的危险需要自己承担。
1.保证机器人的手臂和工具都正确安装。
2.保证机器人的手臂有足够的自由活动空间。
3.不要将安全设备连接到正常的 I/O 接口上,以免造成伤害。
4.确保进行正确的安装设置(例如机器人的安装角度、TCP 中的
质量、TCP 偏移、安全相关配置),将安装文件保存并载入程序内。
5.工具及障碍物不得有尖角或尖点。确保所有人员在机器人可触及
的范围之外。
6.将不同的机械连接起来可能加重危险或引发新的危险。始终对整
个安装进行全面的风险评估。
7.切勿改动机器人。对机器人的改动有可能造成集成商无法预测的
危险。如果机器人以任何方式被改变或改动,节卡不承担任何责任。
1.机器人和电控柜在工作时会产生热量,机器人刚停下时不要触
碰,断电 1 小时左右才可触碰。
2.电控柜会产生热量,切勿将手放在电控柜内罩后面。
1.当能够造成机器人损坏的机械和机器人连接在一起时,推荐单独
对机器人的所有功能以及机器人程序进行检查。推荐使用其他机械工作
空间以外的临时路点来检测机器人程序。
2.强磁场可损坏机器人,不要将机器人一直暴露在永久性磁场中。
1.4 普通警告和提醒
JAKA Zu 7 v2.5 和 JAKA C 7
7
1.使用机器人系统的作业人员严禁穿宽松的衣服,严禁佩戴珠宝,头发较
长的作业人员请确保长头发被束在脑后。
2.在设备运转的过程中,即使机器人看上去已经停止,也有可能是因为机
器人在等待启动信号而处在即将动作的状态。即使在这样的状态下,也应
该将机器人视为正在动作中。
3.在机器人运转过程中,应保证电控柜电源线和机器人电源线可靠连接。
严禁在工作模式下带电插拔电源线及端子。
4.应在地面上画出警示线来标识机器人的运动范围,使操作者了解机器人
包含握持工具(机械手、工具等)的动作范围。
5.确保在机器人操作区域附近建立安全措施(例如,护栏、绳索、或防护
屏幕),保护操作者及周边人群。应根据需要设置锁具,使得负责操作的
作业人员以外者不能接触机器人电源。
6.在人员被机器人夹住或围困等紧急或异常情况下,可以通过用力推或拉
机器人手臂的方式迫使关节转动。无电力驱动情况下手动移动机器人手臂
仅限于紧急情况,并且可能会导致关节损坏。
1.5 责任与风险
责任
该手册信息不涉及如何设计、安装及操作机器人的所有应用,也不涉及所有可能对机器人系统的安全造成影
响的周边设备。
节卡的集成商有责任确保遵循相关的切实可行的国家法律法规,确保完整的机器人应用中不存在任何重大危
险。
该手册包含的所有安全方面的信息都不得视为节卡的保证,即使遵守所有的安全指示,操作人员所造成的伤
害或损害依然有可能发生。
节卡会不断致力于提升本公司机器人的性能以及可靠性,本公司对本手册中存在的错误或者遗漏的信息概不
负责,并且保留对本手册的最终解释权。
风险
在操作人员与机器人之间存在交互关系时就必然存在直接或者间接的肢体接触关系。接触时必须有足够的自
我保护意识,集成商在对客户使用本公司机器人时需要谨慎考虑使用工况。以下为可能出现的危险情况:
搬运时机器人掉落砸伤人员的情况;
由于机器人固定螺钉松动导致伤人的情况;
机器人工作时出现夹伤手指、碰撞伤人的情况;
机器人出现故障没有及时修理而出现的伤人情况;
使用尖锐末端执行器或工具连接端时可能存在危险的情况;
8
JAKA Zu 7 v2.5 和 JAKA C 7
机器人在有毒或者腐蚀性的环境中运转时存在伤人的情况。
1.6 使用用途
JAKA Zu 7 和 C 7 是工业化协作机器人,适用于工业环境中,例如用于操纵设备或固定工具,或用于加工或
传递零件或产品。JAKA Zu 7 和 C 7 只允许在规定的条件与环境下使用。
JAKA Zu 7 和 C 7 具有特殊的安全评级特征,这些特征是特地为协同操作而设计的,也就是说机器人可以在
没有护栏的情况下工作,或者和人类一起工作。协同操作仅针对无危险的应用,即工具、工件、障碍物及其他机
器都经过针对特定应用的风险评估证明不具备重大危险的完整应用。
任何与拟定用途相违的用途或应用都是不允许的。这包括但不限于以下内容:
用于有粉尘等可能发生爆炸的环境中;
用于与生命相关的场合中;
未作危险评判就使用的;
评判的性能等级不合格就使用的;
操作在允许的操作参数之外的。
1.7 紧急情况
当发生紧急情况时,按下急停按钮,可以立即停止机器人的一切运动。紧急停机不可用作风险降低措施,但
可视为次级保护设备。
1.8 无电力驱动的移动
在机器人电源失效或者未使用电源等紧急状况下,可以通过以下两种不同方法来迫使机器人关节移动:
1.强制手动驱动:通过推或拉机器人手臂,能够迫使关节转动。每个关节的制动器均有一个摩擦离合器,
当关节所承受的扭矩大于摩擦离合器的安全扭矩时,关节发生转动。
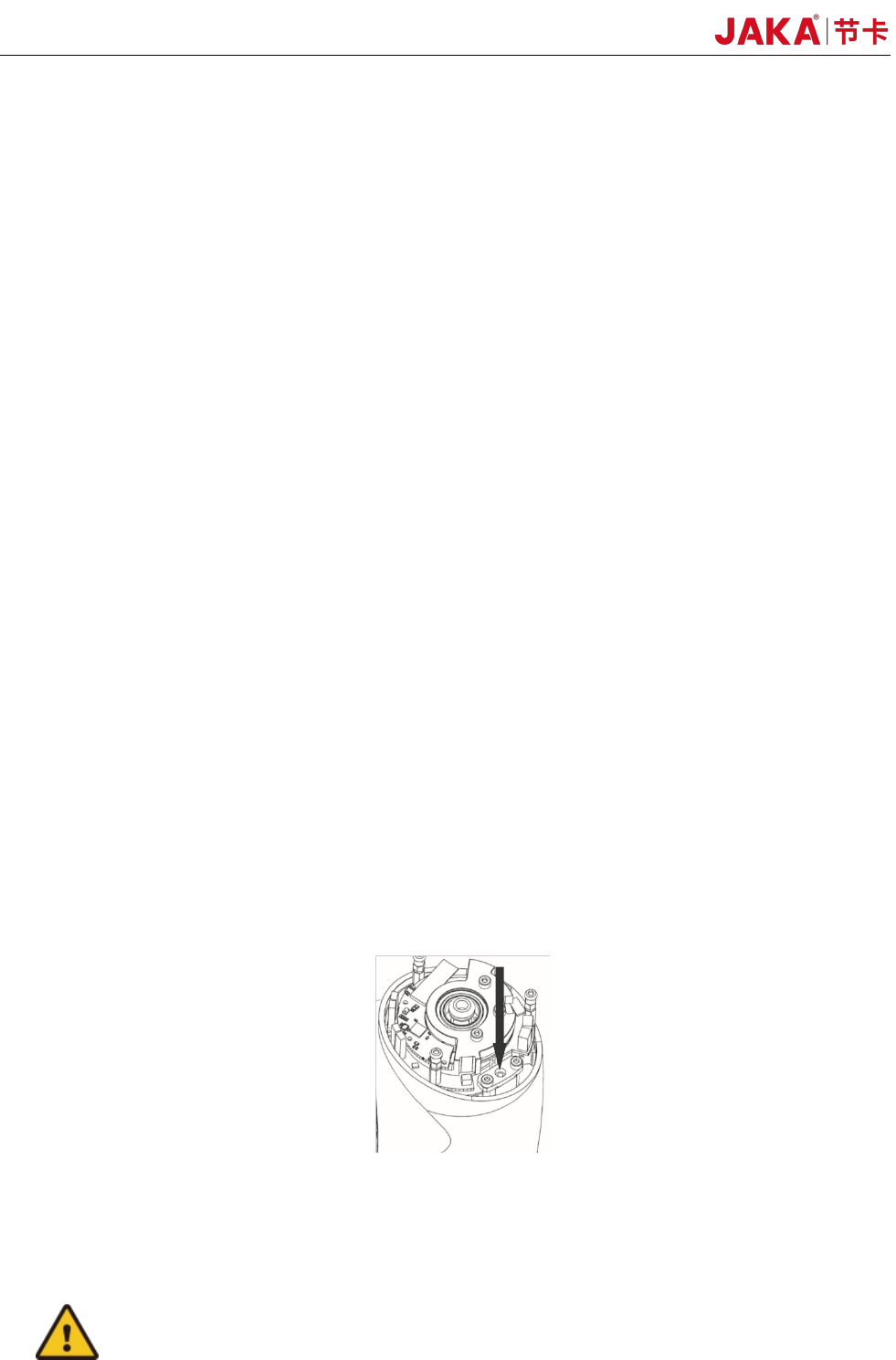
2. 手动释放制动器:卸下用于固定关节端盖的几颗螺钉后取下关节端盖。按下小型电磁铁(如下图所示)
中的滑杆,可以手动释放制动器。
图 1-1 手动释放制动器
警告: