JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第34页
32 JAKA Zu ® 7 v2.5 和 JAKA C7 b) NPN 型输入 图 4-20 NPN 型数 字量 输入 设 备连 接方 式 如图 4-20 所示 : V+ 连 接 24V 电源 正极 (红 色线 ) , 0V 连接 24V 电 源负极(灰 色线),信号线连 接 DI 数字输入 (蓝色或绿 色线)。 3 、 TIO 数字输出接 口电路示例 数字输出接 口为 NPN 型输出,采 用开集( O pen Collecto r …
JAKA Zu 7 v2.5 和 JAKA C 7
31
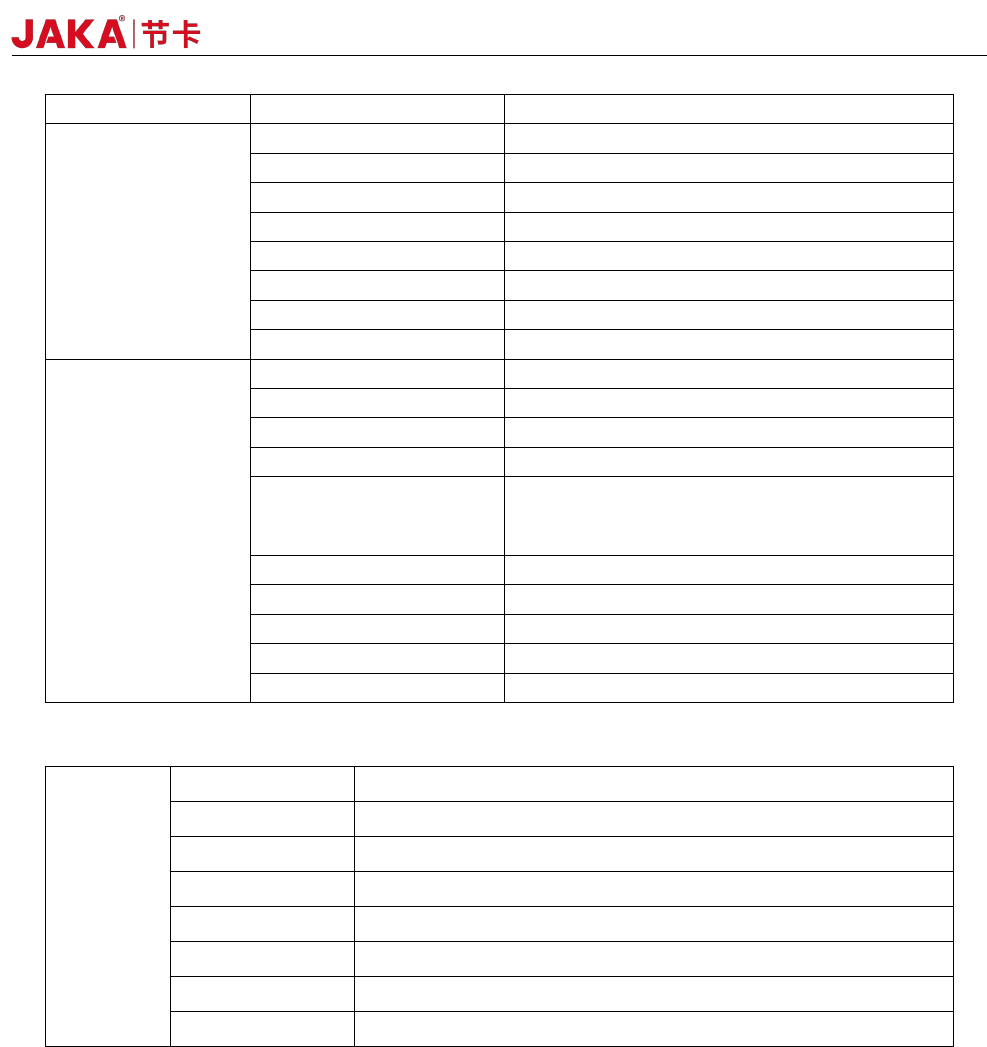
1 +24V - 红色 24V 电源正极,最大输出连续电流 1A
2 DI1 I
蓝色 数字输入 1,NPN 型,接光耦阴极输入端
3 DI2 I
绿色 数字输入 2,NPN 型,接光耦阴极输入端
4 DO1 O 黄色
数字输出 1,NPN 型,开漏输出,单通道电流≤
0.5A
5 DO2 O 粉色
数字输出 2,NPN 型,开漏输出,单通道电流≤
0.5A
6 AIN_P I 棕色
模拟输入:正极,检测范围为±10V,与 AIN_N 引
脚去耦
7 AIN_N I
白色 模拟输入:负极,与 AIN_P 引脚去耦
8 GND -
灰色 24V 电源负极
1、TIO 模拟电压输入接口电路
支持 1 路模拟电压输入接口,其电压输入范围为 0~10V,将模拟电压 AI 正端接入 AIN_P 引脚,负端接 AIN_N。
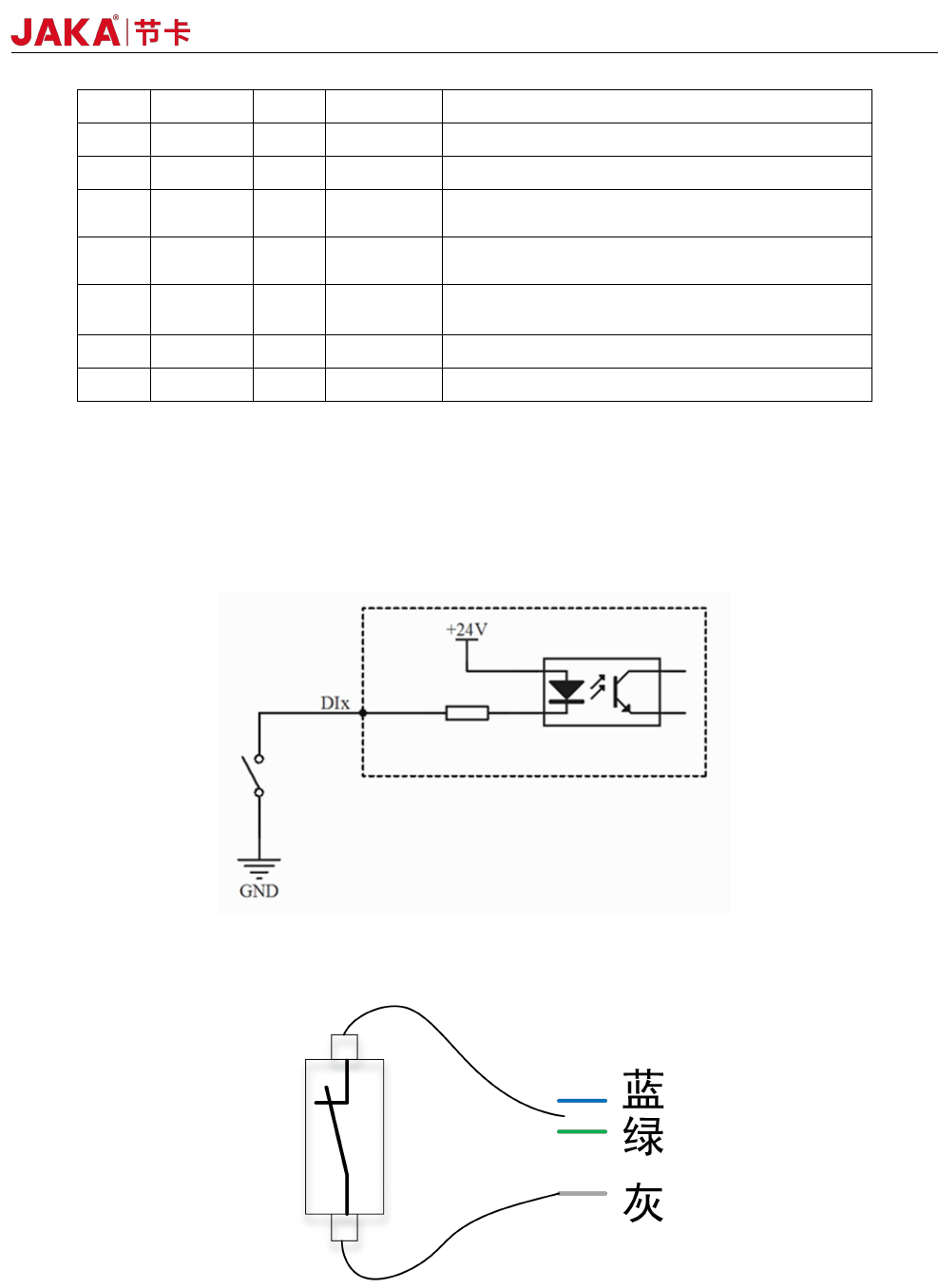
2、TIO 数字输入接口电路示例
TIO 支持 2 路用户 DI 数字输入接口,NPN 型。内部光耦阴极输入,串接 4.7K 电阻,阳极内部连接 24V 电
压,当 DI1 输入低电平(GND)时有效。
图 4-18
a) 干接点型输入
图 4-19
干接点型输入(即开关型输入)一端连接 TIO 中 24V 电源负极(灰色线),另一端连接 DI 数字输入(蓝
色或绿色线),如图 4-19 所示。
32
JAKA Zu
®
7 v2.5 和 JAKA C7
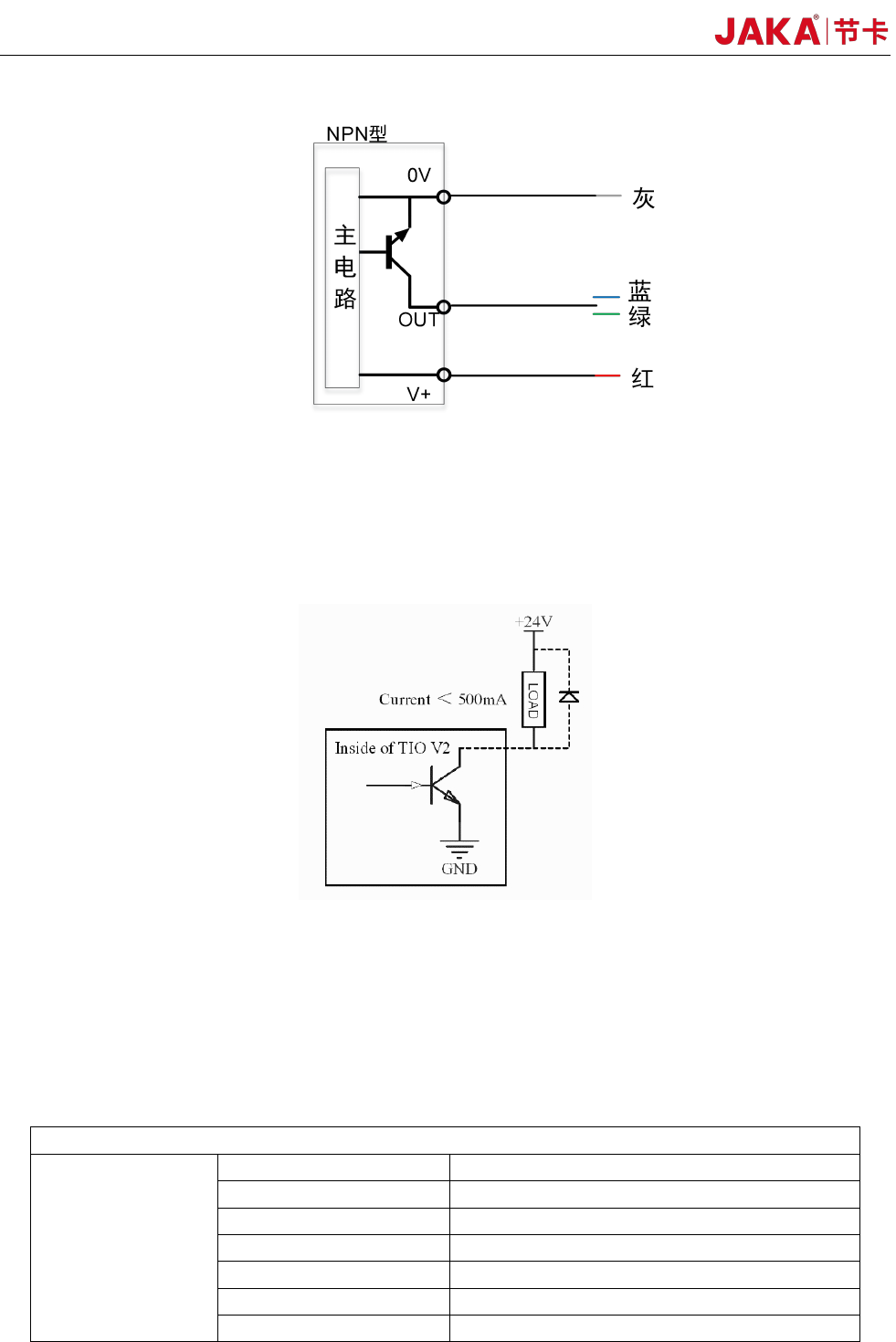
b) NPN 型输入
图 4-20
NPN 型数字量输入设备连接方式如图 4-20 所示:V+连接 24V 电源正极(红色线),0V 连接 24V 电
源负极(灰色线),信号线连接 DI 数字输入(蓝色或绿色线)。
3、TIO 数字输出接口电路示例
数字输出接口为 NPN 型输出,采用开集(Open Collector)输出,最高支持连续 500mA 电流能力输出。
图 4-21
*注意:强烈推荐为电感性负载使用保护二极管(如继电器、电磁铁、直流电机等)。否则可能造成该端口
永久损坏!
4.6 技术规格
1.JAKA Zu 7 和 C 7 机器人技术规格:
机器人型号 JAKA Zu 7 和 JAKA C 7
产品特性
有效负载 7kg
重量(含电缆)
22kg
工作半径 819mm
重复定位精度 JAKA Zu
®
7 为±0.02mm,C 系列为±0.05mm
自由度 6
编程 图像化编程、拖拽编程
示教器类型 移动终端(PAD/手机)APP
JAKA Zu 7 v2.5 和 JAKA C 7
33
协作操作 根据 GB11291.1-2011 进行协同操作
动作范围及速度
机械臂 动作范围 最大速度
关节 1 ±270° 180°/s
关节 2 -50°、+230° 180°/s
关节 3 ±155° 180°/s
关节 4
-85°,+265° 180°/s
关节 5 ±270° 180°/s
关节 6
±270° 180°/s
工具端最大速度 / 2.5m/s
物理性能及其他
功耗 平均 350W
温度范围 0-50°C
IP 等级
IP54
机器人安装 任意角度安装
工具 I/O 端口
数字输入 2
数字输出 2
模拟输入 1
工具 I/O 电源 24V
底座直径
158mm
材质 铝合金、PC
工具 I/O 尺寸
M8
机器人连接电缆长度 6m
2.电控柜技术规格:
电控柜
IP 等级
IP44
电控柜 I/O 端口
16 个数字输入/16 个数字输出/2 个模拟输入或输出
电控柜 I/O 电源
24V
通信方式
TCP/IP, Modbus TCP, Modbus RTU
电源
100-240VAC,50-60Hz
电控柜尺寸
410*307*235(mm)(W*H*D)
重量
12kg
材质
不锈钢合金