JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第13页
JAKA Zu 7 v2.5 和 JAKA C 7 1 1 终端类型 平板电脑 操作系统 Android 8.0 及以上 处理器 麒麟 695 或骁龙 660 以上 存储容量 32GB 系统内存 4GB 屏幕尺寸 8.0 寸及以上 网络通讯 WiFi 表 2-1 操作终端 配置表 用户在购买 JAKA Zu 和 C 系列 协作机器人 时,可同时 提出购买操 作终端的需求 ,或者用户自 备平板电脑。 推荐使用的 平板电脑型号 为:华为 M…
10
JAKA Zu 7 v2.5 和 JAKA C 7
第 2 章 欢迎使用小助机器人
在阅读本章前,请确保您已经详细阅读并充分理解第 1 章的《安全规范》。
本章将快速介绍节卡小助系列协作机器人的基本组件与使用方法,作为对机器人的初步了解。详细的机械电
气规格、软件操作手册请参考其它章节。
在使用过程中,如果您需要快速帮助,请拨打我们的快速咨询热线:400-006-2665。
2.1 机器人部件概览
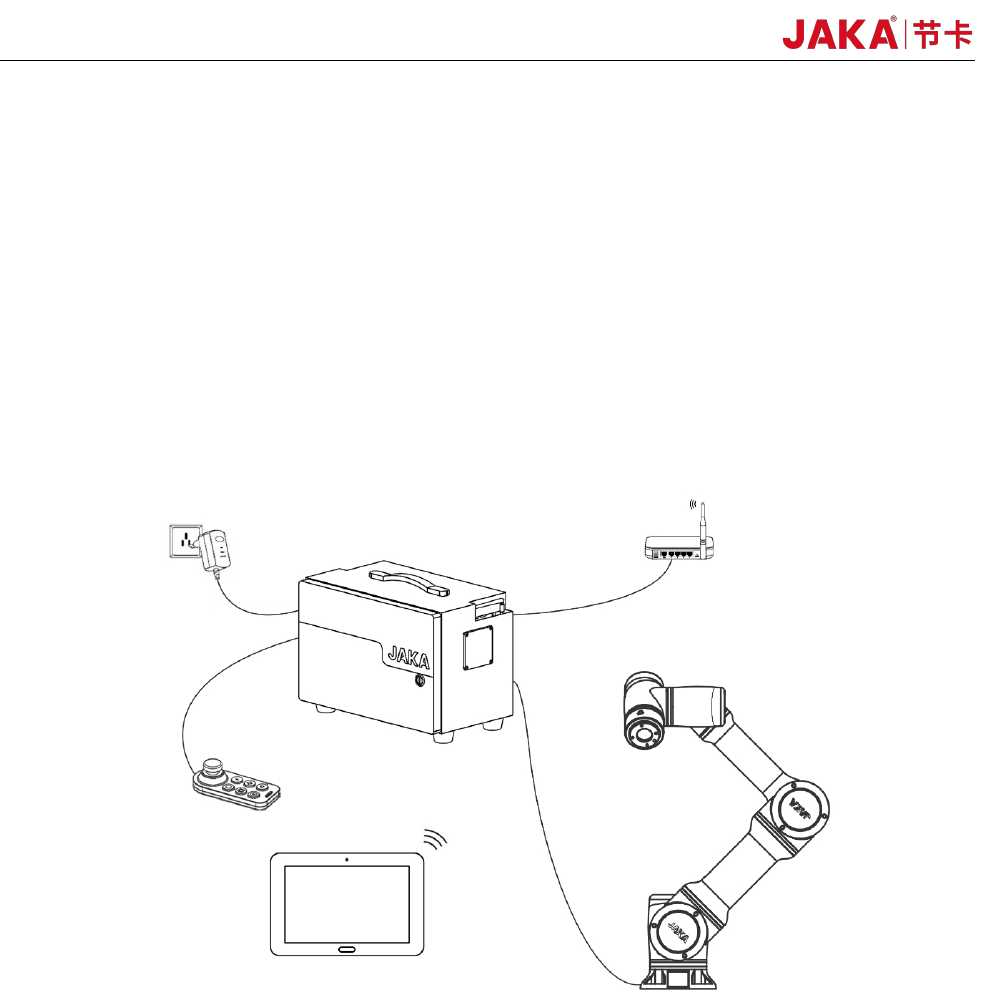
图 2-1 机器人部件概览
如图 2-1 所示,JAKA Zu 和 C 系列机器人使用无线互联的方式,使用时需要包括以下几个部件:
操作终端:用户进行编程、设置等操作的设备。
机器人本体:主要运动部件,实现用户期望的动作。同时本体末端布置有指示机器人状态的环形指示灯、用
于拖拽和编程的按钮、以及连接工具的 IO 接口,即 TIO 接口。
电控柜及其手柄:电控柜包括核心运算部件,以及多种电气接口,同时电控柜配备有方便用户操作的手柄。
路由器与网线等:电控柜的网口应连接至路由器上,操作终端同时也连接至此路由器的无线网络内。推荐为
JAKA Zu 系列机器人单独配置路由器以防止与其它设备冲突。
2.2 操作终端
节卡提供基于 Android 系统开发的 JAKA Zu 和 C 系列机器人操作软件,该软件推荐的运行硬件配置如表 2-1:
JAKA Zu 7 v2.5 和 JAKA C 7
11
终端类型 平板电脑
操作系统 Android 8.0 及以上
处理器 麒麟 695 或骁龙 660 以上
存储容量
32GB
系统内存 4GB
屏幕尺寸 8.0 寸及以上
网络通讯 WiFi
表 2-1 操作终端配置表
用户在购买 JAKA Zu 和 C 系列协作机器人时,可同时提出购买操作终端的需求,或者用户自备平板电脑。
推荐使用的平板电脑型号为:华为 M5 或小米 4S。
2.3 机器人本体
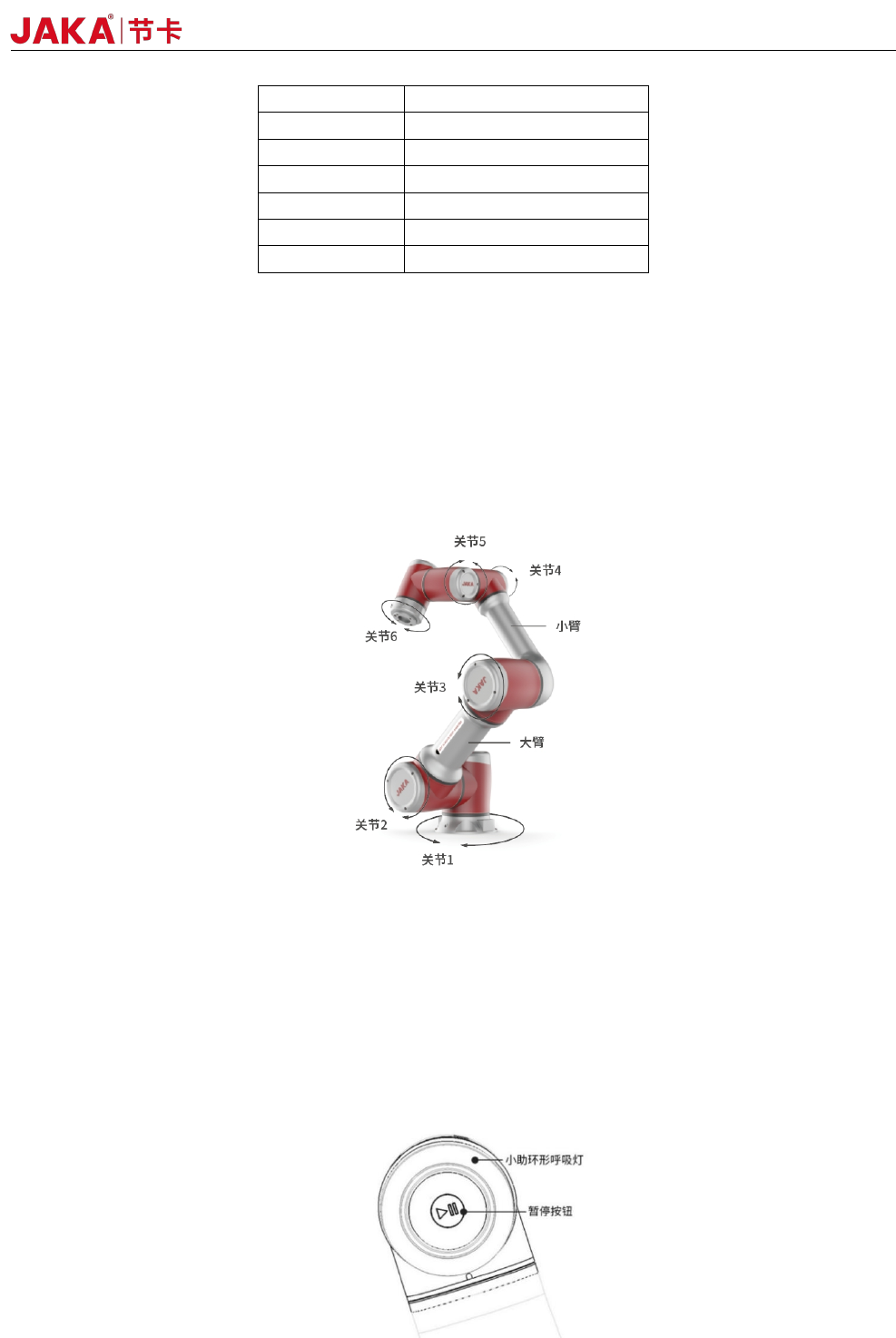
小助协作机器人本体示意如图 2-1 所示,主体包括 6 个旋转运动关节,以及大臂与小臂两个连接臂杆。在机
器人末端配有指示机器人状态的指示灯以及暂停/恢复按钮,在工具法兰外侧配有两个按钮。
图 2-1 小助协作机器人本体
2.3.1 机器人末端
节卡小助系列协作机器人在末端配有指示灯和暂停按钮。
环形指示灯与按钮的位置如图 2-2 所示,其颜色指示含义如表 2-2 所示。机器人末端按钮在机器人运行时,
按下机器人末端按钮可以暂停机器人的运动,再次按下可以恢复运动。
12
JAKA Zu 7 v2.5 和 JAKA C 7
图 2-2 环形灯与按钮
颜色 工作状态
蓝色 上电未使能
绿色 使能完成
红色 故障
黄色 拖拽模式
黄色快闪 暂停模式
表 2-2 指示灯含义
警告:
末端暂停按钮的使用,需要用户充分评估可能存在的风险,机器人的突然启动和停止,可能会造成人身伤害
或设备损毁。
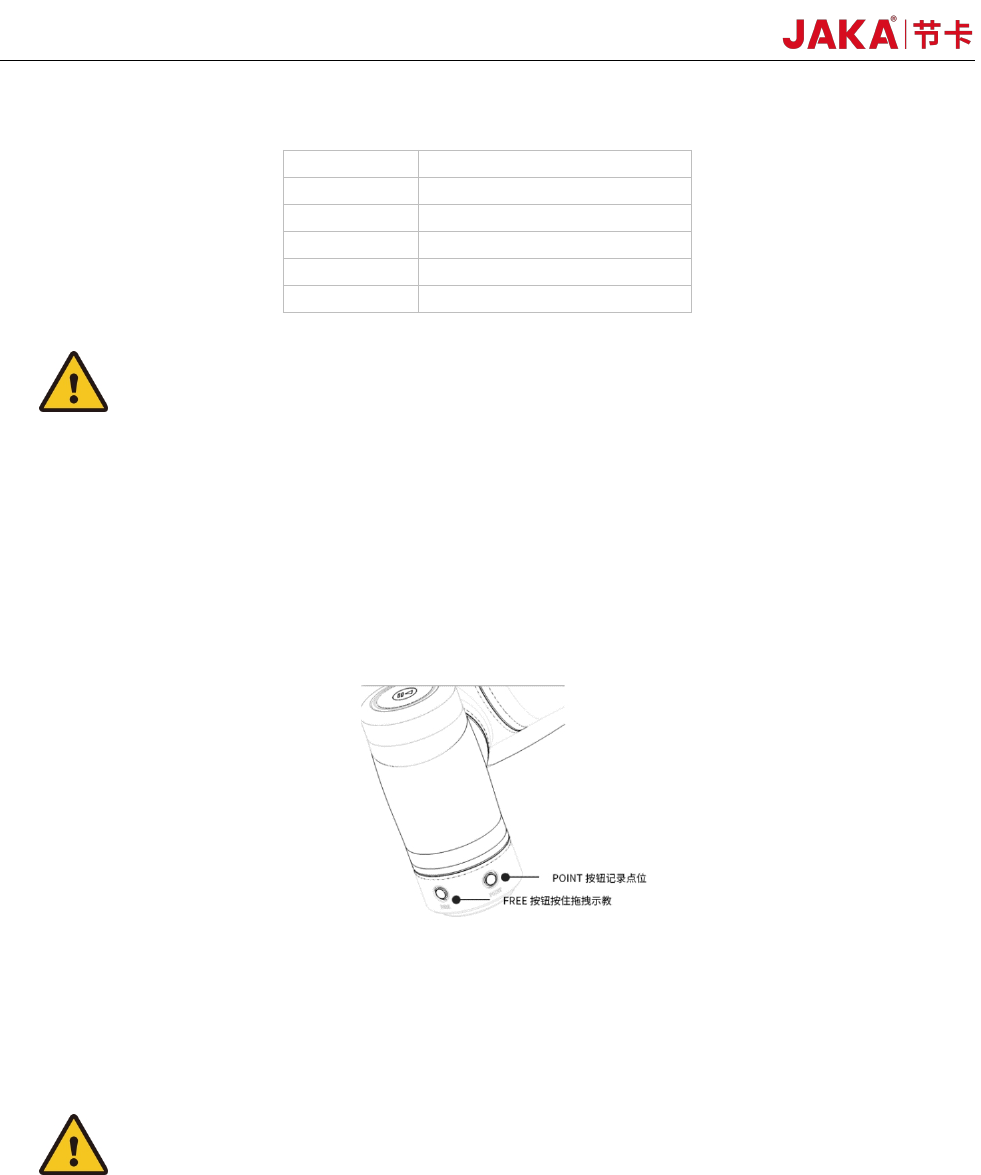
2.3.2 末端法兰按钮与接口
节卡小助系列协作机器人在末端法兰侧边配有工具 IO 接口及两个按钮,按钮分别为拖拽按钮(FREE),与
记录点位按钮(POINT),如图所示。
图 2-3 FREE 与 POINT 按钮
工具 IO 的详细说明参见第 4 章《电气接口》。
当拖拽按钮按下,机器人进入拖拽示教模式,在此模式下,用户可以直接拖动机器人至期望点。
记录点位按钮需配合机器人操作软件使用,当记录点位按钮按下时,操作软件会记录相应的位置。
警告:
拖拽按钮的使用,需要用户充分评估可能存在的风险,必须确保正确地设置了机器人安装姿态末端负载与
TCP 等参数,否则可能造成人身伤害或设备损毁。
2.4 电控柜及其手柄
节卡小助系列协作机器人的电控柜主要包含各种电气接口,详细内容可以参考第 4 章《电气接口》。
电控柜提供一个按键手柄,可以在编写好,并完成默认加载运行程序的情况下不使用 APP 来启动机器人。
手柄通过按键的组合来向控制器发送控制命令,按键组合功能描述如下: