JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第29页
JAKA Zu 7 v2.5 和 JAKA C 7 27 图 4-13 数字输出模 块可以通过 APP 的 DO 功能进行控制。 需要 控制负载量。 单通道 1A , 总体不能超 过电源 的输出能力 。 *注意:强烈 推荐为电感性 负载使用保护 二极管(如 继电器、电 磁铁、直流 电机等)。 4.3.4 模拟量 具有 2 路模拟量输 入输出接口( Ch1 , Ch2 ),模式可 配置: 1) 电流信号输 入: 4~20m A 。 2) …
26
JAKA Zu 7 v2.5 和 JAKA C 7
图 4-10
PNP 型输入接线方式如图 4-10 所示,电源线 V+连接至端口 V+,信号线 OUT 连接至指定 DI 通道,0V 线
接面板上 V-。当有信号触发时,面板上对应指示灯亮起,同时在 APP 界面上可以看到对应指示灯亮起。
4.3.3 数字量输出(DO)
图 4-11
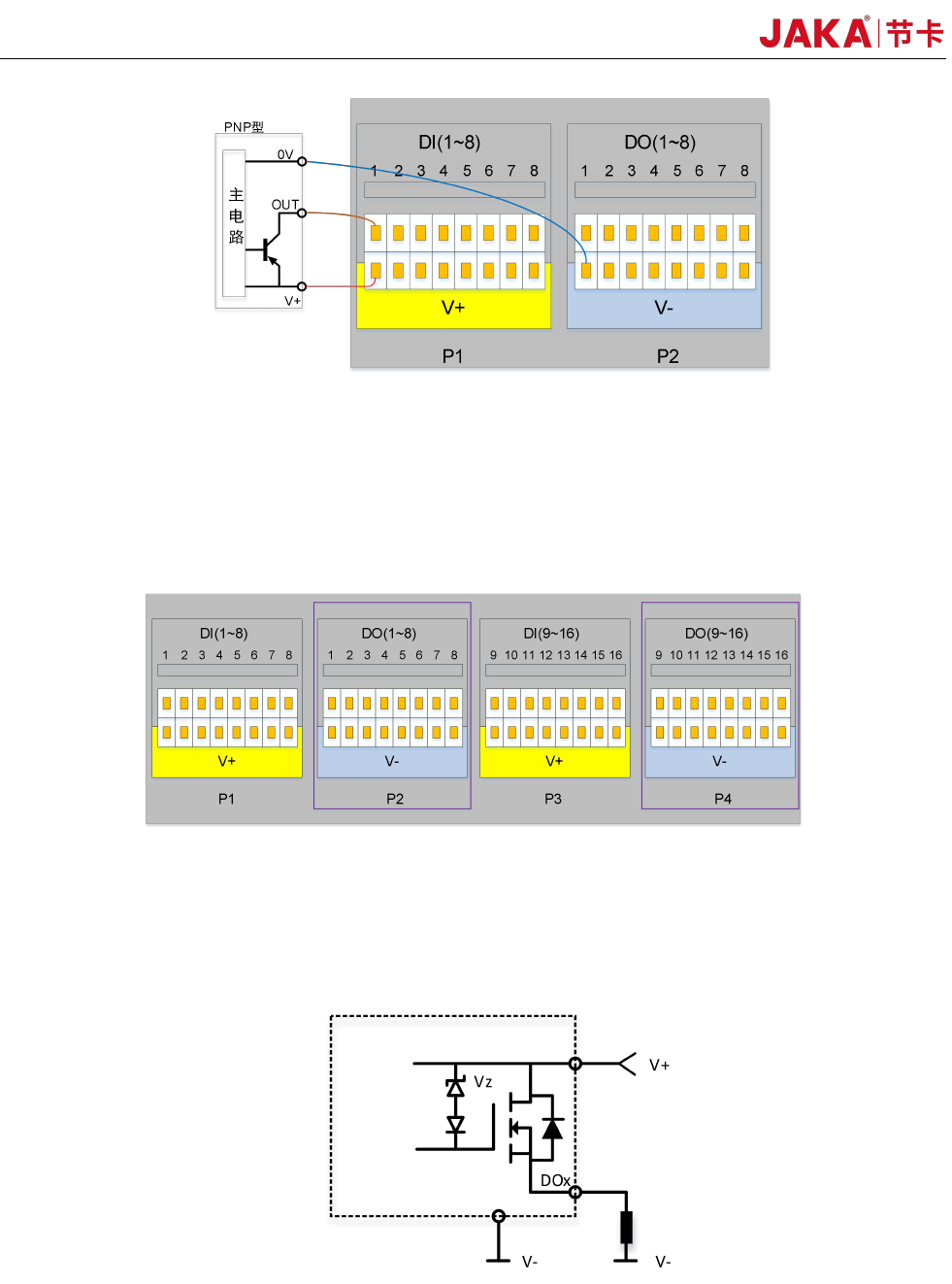
电控柜配备有 16 路数字量 PNP 型信号输出(DO1~DO16),支持隔离信号输出。
内部采用高边(High-side)输出,单路最大持续电流可达 1A。但当 V+默认短接内部 24V 电源时,24V 电源电
流被限制在 1.5A。典型内部电路图如下所示:
图 4-12
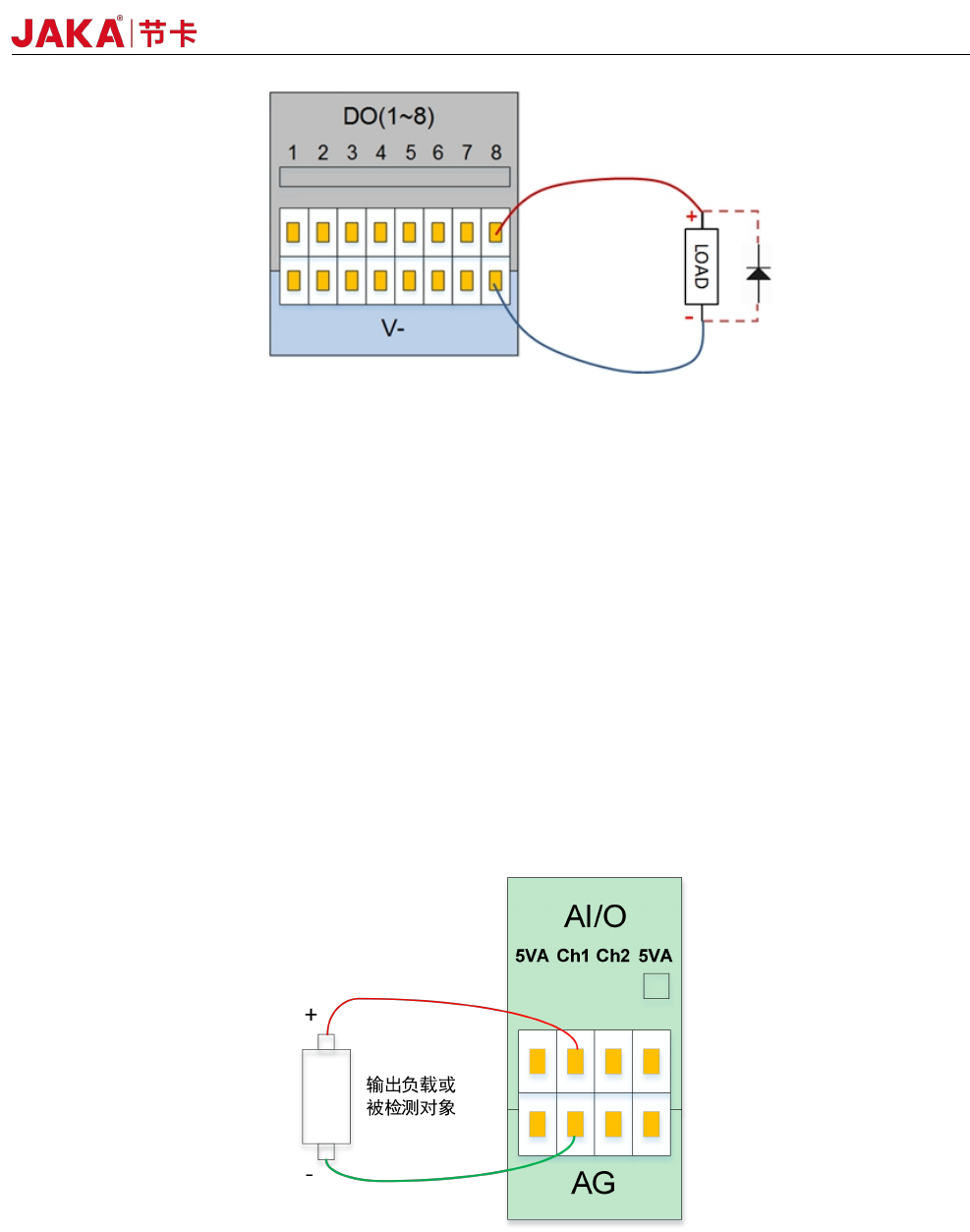
数字输出模块接线如下图所示:
JAKA Zu 7 v2.5 和 JAKA C 7
27
图 4-13
数字输出模块可以通过 APP 的 DO 功能进行控制。需要控制负载量。单通道 1A,总体不能超过电源
的输出能力。
*注意:强烈推荐为电感性负载使用保护二极管(如继电器、电磁铁、直流电机等)。
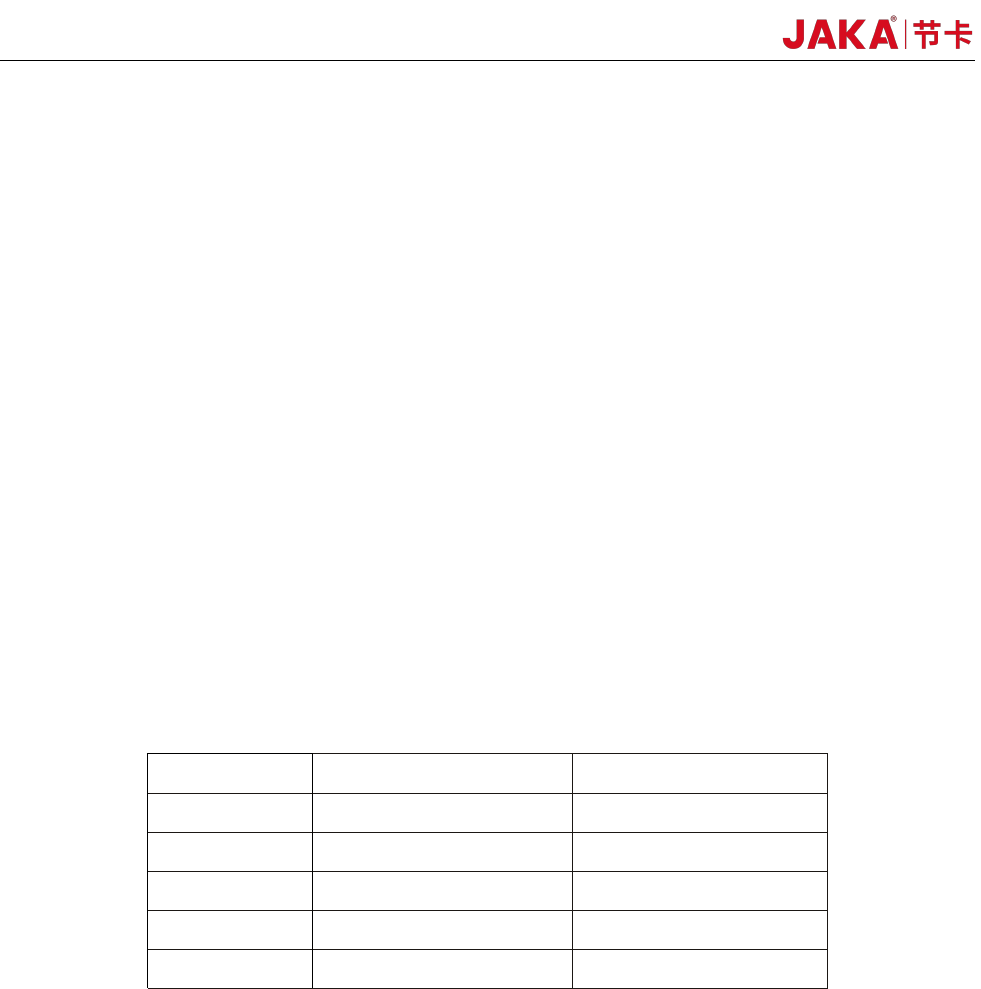
4.3.4 模拟量
具有 2 路模拟量输入输出接口(Ch1,Ch2),模式可配置:
1) 电流信号输入:4~20mA。
2) 电压信号输入:0~5V,0~10V,-10V~+10V。
3) 电流信号输出:0~20mA
4) 电压信号输出:0~5V,0~10V,-10V~+10V。
接线方法:
图 4-14
节卡 CAB V2 模拟 AI/O 接口通过软件可配置成不同工作模式(出厂默认为 0~10V 输入),当用户需要配置
成其它功能模式时,可操作 APP 进行设置。为获得高准确度,建议遵循以下说明:
•使用最靠近此 AI/O 的 AG 终端。
•设备和电控柜使用相同的接地。模拟 AI/O 与电控柜不进行电位隔离。
•使用屏蔽电缆或双绞线。将屏蔽线与“电源”端子上的“AG”终端相连。
28
JAKA Zu 7 v2.5 和 JAKA C 7
•使用在电流模式下工作的设备。电流信号的敏感度低于接口。
4.3.5 高速接口
P6 高速接口(HSI,High Speed Interface)可以外接编码器,用于传送带跟踪等场合。详细使用方法可联
系节卡技术人员获取支持。
4.3.6 远程开关机接口
利用远程 ON/OFF 控制,可在不适用 APP 或手柄时开启/关闭电控柜。它通常可由用户连接 PLC 系统时,
远程控制机器人电控柜的开关机。
当 ON/OFF 接收到 5-24V 电源时(参考地为 V-)有效。 “ON/OFF”接口与手柄开关机按钮功能相同。
用户可通过开关短接 ON/OFF 至 12V 电源或者 VSB 接口。
4.3.7 安全 I/O 接口
为保障机器人安全功能配置,电控柜提供两个固定的安全功能输入接口,EI 和 SI 分别为紧急停止和用户停
止,且都有两路冗余设计,任何一个信号有效时,都可启用该功能。紧急停止功能和手柄急停按钮功能类似,而
用户停止功能属于程序暂停,两者的功能差异如下:
紧急停止 EI 用户停止 SI
机器人运动状态 停止 停止
关节电机状态 停止 使能
机器人电源 断电 有电
程序执行 中断,需重新上电执行 暂停
制动器状态 释放抱闸 不释放抱闸
用户可根据实际安全要求,接入安全门、安全光幕、传感器等。
4.4 电控柜底面板接口
电控柜底面板包括出线孔、绑线孔、手柄出线口,以及以太网接口、机器人重载连接器、品字插座与开关等,
其中出线孔和绑线孔可用于布置和固定通往机器人前面板的线束。以太网接口用于将机器人连接至本地网络。品
字插头与开关用于电源连接,机器人重载连接器用于连接电控柜与机器人本体。