JAKA Zu 7 2.5和JAKA C7-电控柜V2.1-硬件手册(中文版).pdf - 第18页
16 JAKA Zu 7 v2.5 和 JAKA C 7 图 3-3 JAKA Zu 7 , C 7 与电控柜外形 尺寸图 3.1.2 机器 人的工作 空间 JAKA Zu 7 机器 人的工作空间 如图 3-4 所示 ,选择机器人 安装位置时, 必须考虑机器 人正上方和正 下方的 圆柱体空间, 尽可能避免 将工具移向圆 柱体空间。 因为这样会 造成工具运动 较慢时, 关节 却转动过 快, 从而导 致 机器人工作 效率低下,风 险评估难以…
JAKA Zu 7 v2.5 和 JAKA C 7
15
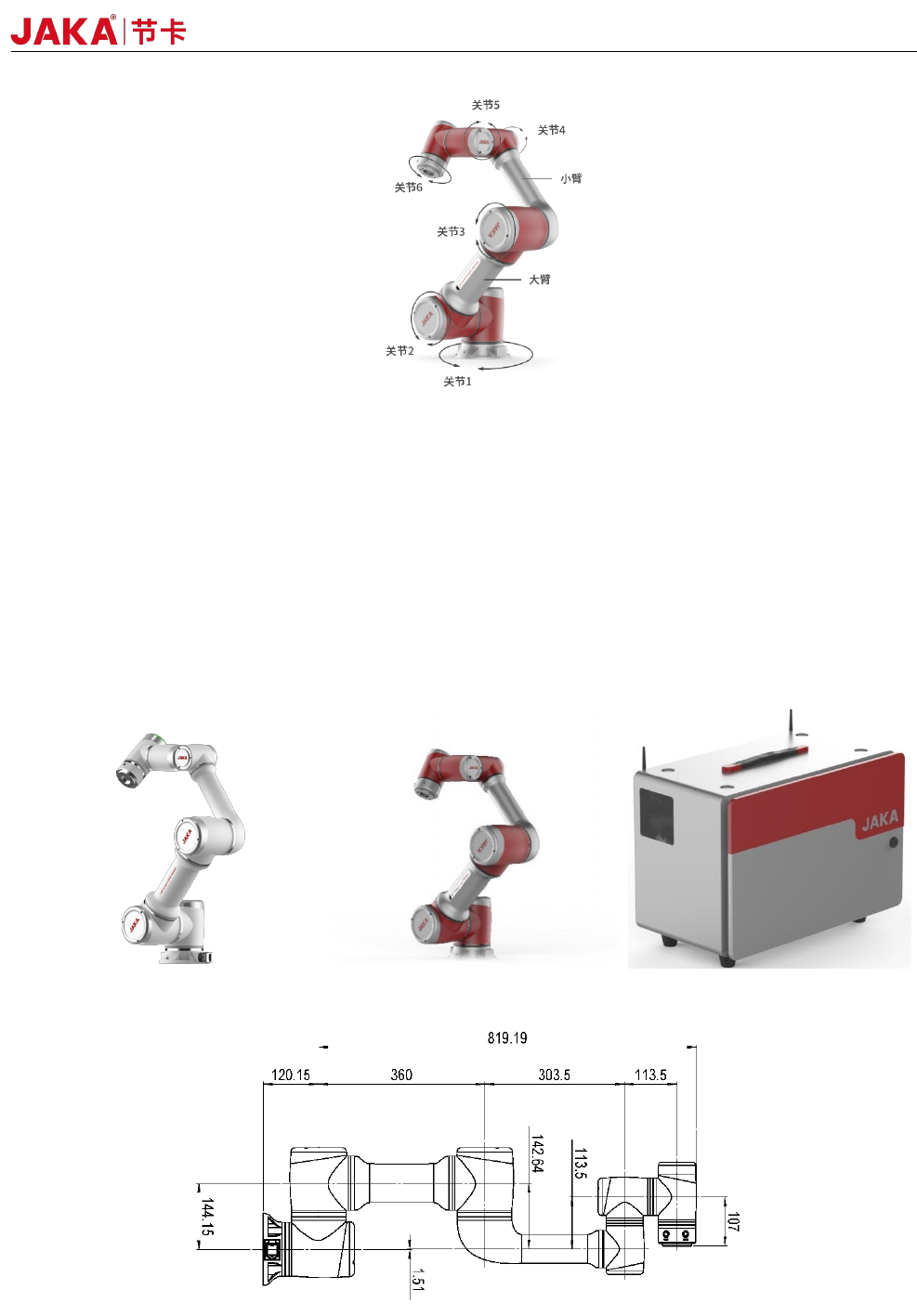
图 3-1 小助机器人本体结构图
3.1 机器人工作空间
3.1.1 机器人外形尺寸
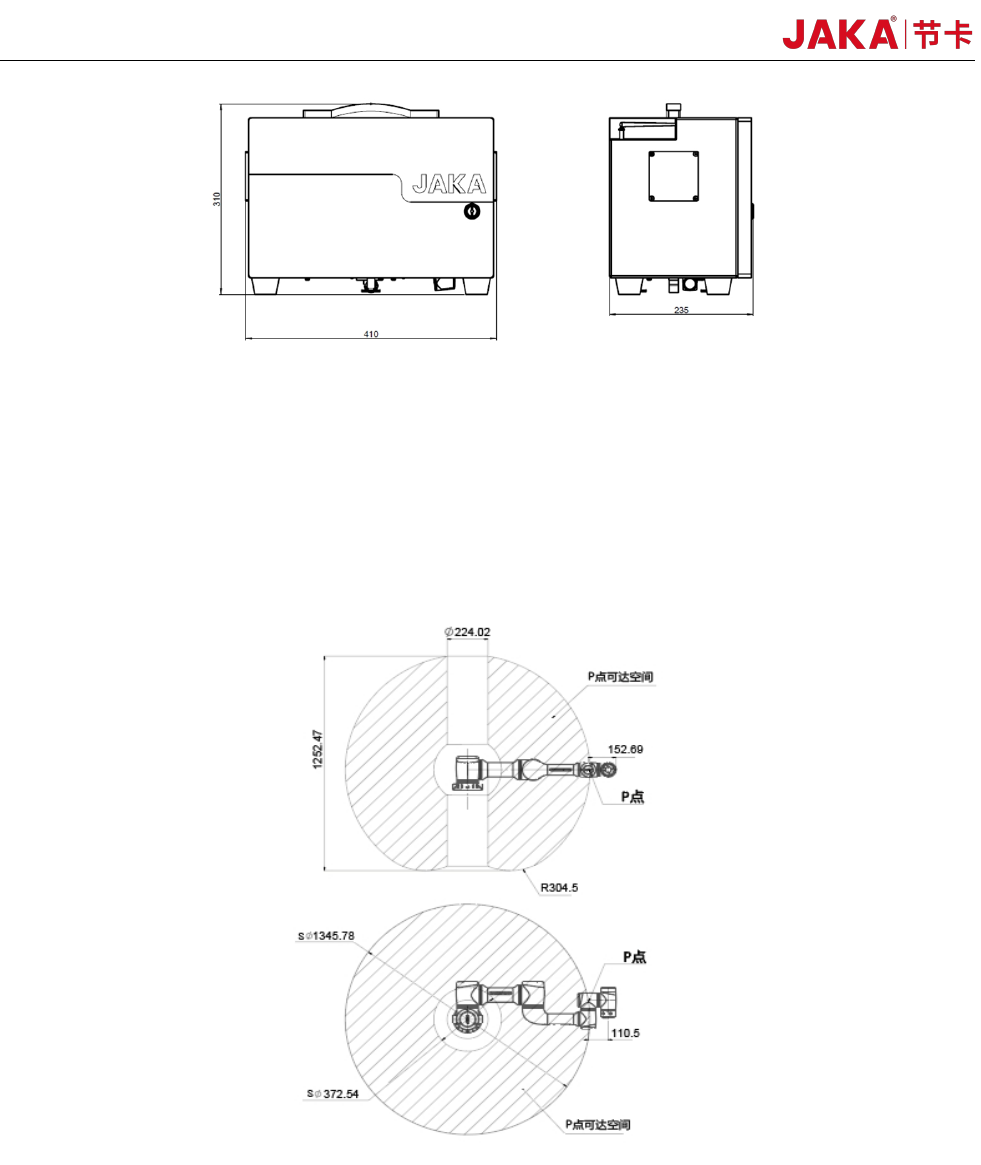
JAKA Zu 7 和 C 7 机器人与电控柜的实物照片与外形尺寸如图 3-2、图 3-3 所示。在安装时务必考虑到机器
人的运动范围,以免伤害周围人员和设备。
图 3-2 JAKA Zu 7,JAKA C 7 与电控柜实物图
16
JAKA Zu 7 v2.5 和 JAKA C 7
图 3-3 JAKA Zu 7,C 7 与电控柜外形尺寸图
3.1.2 机器人的工作空间
JAKA Zu 7 机器人的工作空间如图 3-4 所示,选择机器人安装位置时,必须考虑机器人正上方和正下方的
圆柱体空间,尽可能避免将工具移向圆柱体空间。因为这样会造成工具运动较慢时,关节却转动过快,从而导致
机器人工作效率低下,风险评估难以进行。
图 3-4 JAKA Zu 7,JAKA C 7 工作空间图
3.2 安装
3.2.1 简要安装步骤
1.确定机器人的工作范围;
2.将机器人本体安装在底座上;
JAKA Zu 7 v2.5 和 JAKA C 7
17
3.将所需工具安装在机器人末端。
3.2.2 重要安全说明
警告:
1.确保机器人手臂正确并安全地安装到位。
2.安装表面必须是防震的,有足够的承载能力。
警告:
1.确保工具正确并安全地安装到位。
2.确保工具安全,不会有零件意外坠落造成危险。
警告:
1.确保电控柜和线缆不接触液体。潮湿的电控柜可导致死亡。
2.电控柜不得暴露在灰尘或超出 IP44 等级或潮湿的环境下。密
切注意存在传导性灰尘的环境。
警告:
如果机器人泡在水中超过一定时间,则可能会被损坏。机器人不应安装在水中或潮湿环境中。
3.2.3 机器人本体安装
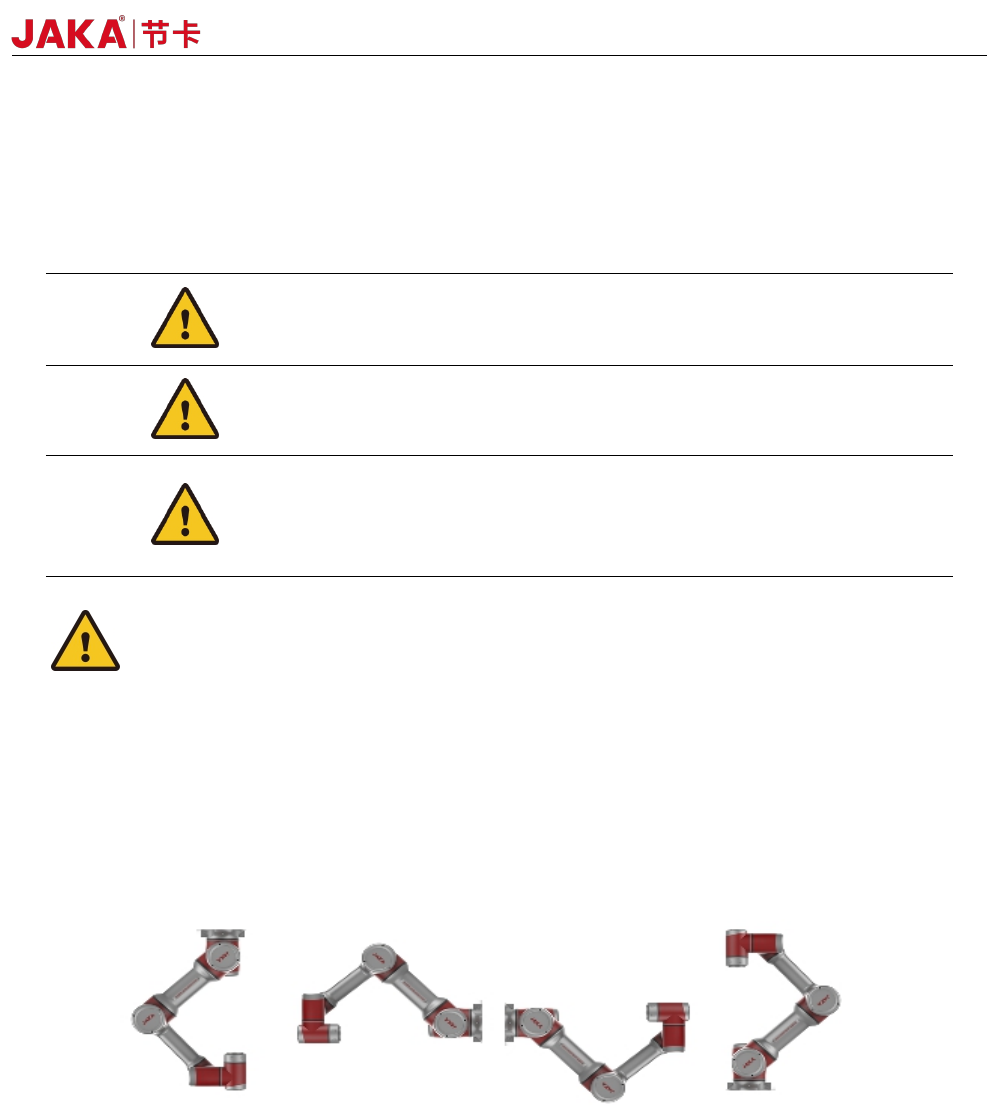
JAKA Zu 和 C 系列机器人可以 360°任意位姿安装,支持吊装、侧装等多种安装方式。几种典型的安装
方式如图 3-5 所示:
图 3-5 典型安装方式
JAKAZu 7 和 C 7 使用 4 颗 M8 螺钉,通过机器人基座上的 4 个
∅
9mm 通孔来安装机器人。建议以 40Nm
扭矩紧固这些螺钉。如果需要非常准确地调整机器人的位置,还可以在准备安装的面上钻 2 个
∅
8mm 的销钉
孔,用销钉加以定位。也可购买精确的机座作为附件来使用。将机器人安装在一个坚固的表面,该表面应当
足以承受至少 10 倍的底座关节的最大扭矩,以及至少 5 倍机器人的重量。此外,该表面应没有振动。如果
机器人安装在线性轴或活动的平台上,则安装机座的加速度应很低。高加速度会导致机器人停止,因为高加
速度会导致机器人误以为撞到东西而停止运行。图 3-6 为机器人的安装尺寸图,所有测量值均以 mm 为单
位。