KE-2070_2080 MS参数..pdf - 第43页
Rev.1.00c MS 参数 4. 偏差设置 4-1. 激光 / 传感器偏差 4-1.1. 功能 激光 / 传感器偏差是取得基板上面高度、激光高度、吸嘴旋转中心、角度偏差。 (但用 KE-2080 的右贴装头时不取得吸嘴旋转中心、角度偏差。) 机板的上面高度取得从校准部上面到各贴装头的 Z 轴原点位置的尺寸 。 θモー タ Z ャ フ ト モ ー タ リニアガ イ ド Z軸ス ラ イドシ ボールネ ジ 原点セン サ センサド グ キャ…
Rev.1.00c
MS 参数
4. 偏差设置
4-1. 激光/传感器偏差
4-1.1. 功能
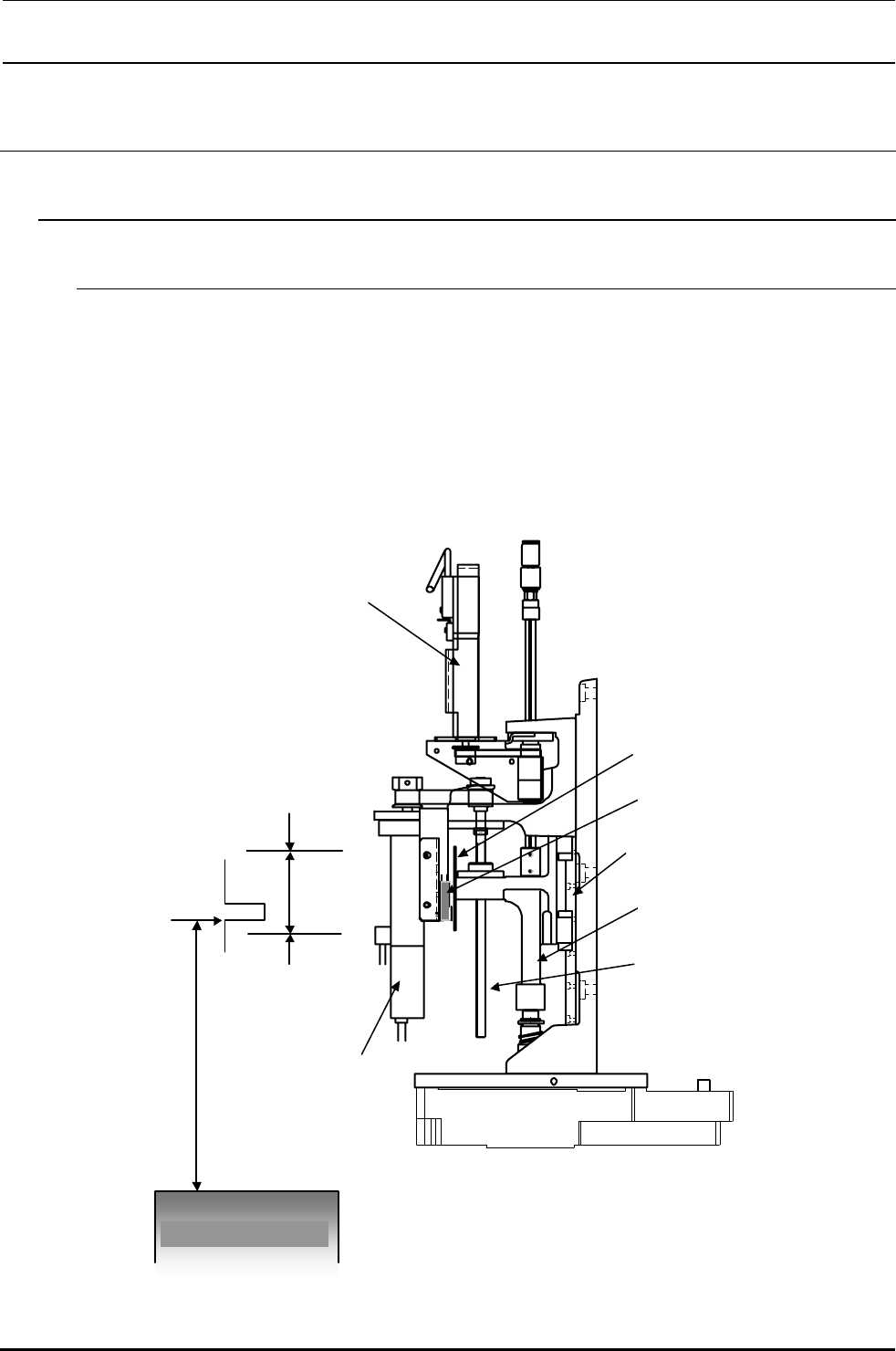
激光/传感器偏差是取得基板上面高度、激光高度、吸嘴旋转中心、角度偏差。
(但用 KE-2080 的右贴装头时不取得吸嘴旋转中心、角度偏差。)
机板的上面高度取得从校准部上面到各贴装头的 Z 轴原点位置的尺寸。
θモータ
Z
ャフト
モータ
リニアガイド
Z軸スライドシ
ボールネジ
原点センサ
センサドグ
キャリブ ブロックレーション
Z
域
点センサ
軸原点位置
原点センサ
ON領域
原点センサ
OFF領
原
OFF領域
校准块
θ马达
Z 轴原点位置
原点传感器
OFF 区域
原点传感器
ON 区域
原点传感器
OFF 区域
传感器碰块
原点传感器
直线导轨
Z 轴滑动轴
滚珠丝杠
エンコーダ
Z相信号
编码器
Z 相信号
基板上面高
さ
Z 马达
基板上面高度
4-1
Rev.1.00c
MS 参数
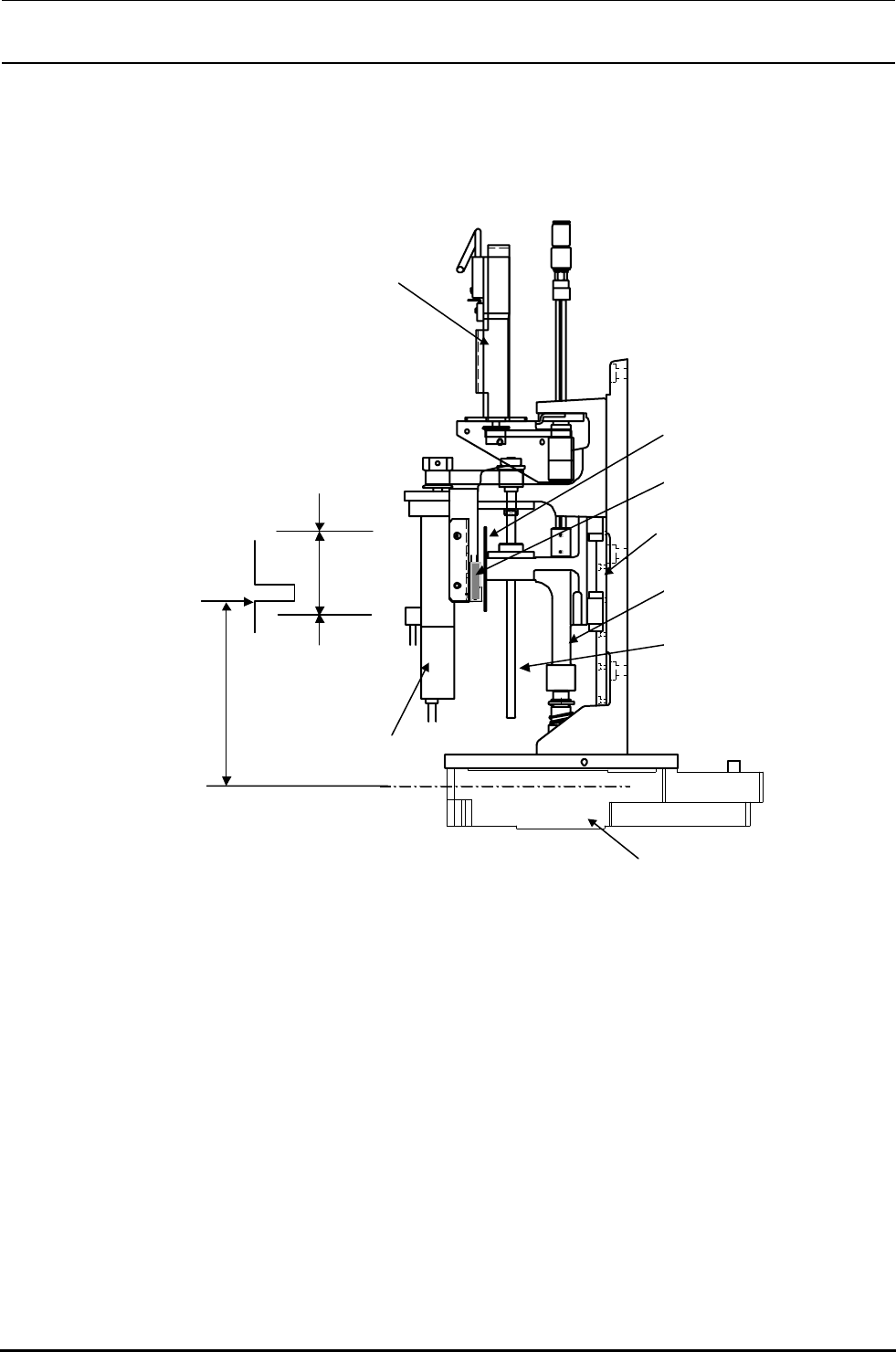
激光高度取得从各贴装头的 Z 轴原点位置到激光传感器的高度的尺寸。
θモータ
Zモータ
リニアガイド
Z軸スライドシャフト
ボールネジ
原点センサ
センサドグ
Z
原点センサ
軸原点位置
原点センサ
ON領域
原点センサ
域OFF領
OFF領域
θ马达
滚珠丝杠
Z 轴滑动轴
直线导轨
原点传感器
传感器碰块
Z 马达
原点传感器
OFF 区域
原点传感器
ON 区域
原点传感器
OFF 区域
Z 轴原点位置
エンコーダ
Z相信号
编码器
Z 相信号
レーザセンサ
激光传感器
レーザ高さ
激光高度
4-2